
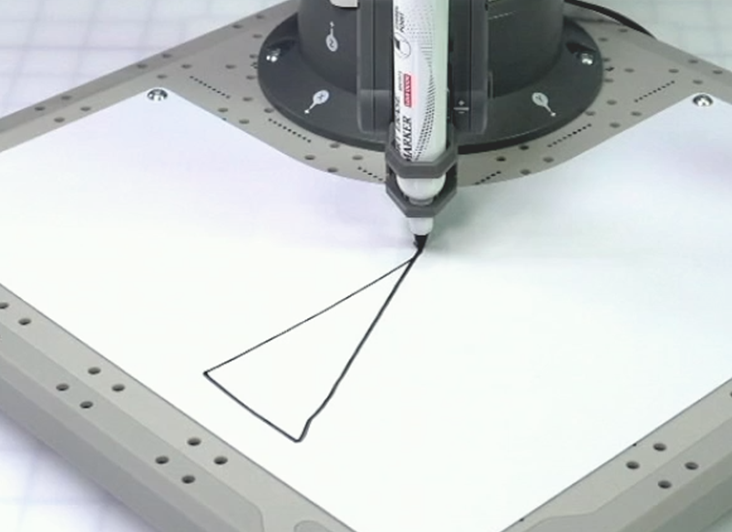
ในยูนิตก่อนหน้านี้คุณย้ายแขน 6 แกนไปยังจุดต่างๆรอบๆสิ่งกีดขวางโดยการเคลื่อนที่ทีละจุดไปตามแกน x และ y ในหน่วยนี้คุณจะสร้างสิ่งนั้นเพื่อรวมการเคลื่อนที่ไปตามแกนหลายแกนพร้อมๆกัน เมื่อใช้ปากกาคุณจะสามารถมองเห็นเส้นทางของแขน 6 แกนในขณะที่วาดรูปทรงที่มีเส้นทแยงมุมเช่นสามเหลี่ยม
ในบทเรียนนี้คุณจะ:
- เรียนรู้เกี่ยวกับการเคลื่อนที่แบบหลายแกนเนื่องจากเกี่ยวข้องกับแขน 6 แกน
- ดูโปรเจกต์และคาดการณ์การเคลื่อนที่ของแขน 6 แกน
- เปรียบเทียบการคาดการณ์ของคุณกับการเคลื่อนที่จริงของแขน 6 แกน
การเคลื่อนที่ไปตามแกนหลายแกน
เมื่อคุณกำหนดรหัสแขน 6 แกนเพื่อย้ายไปยังจุดต่างๆในหน่วยก่อนหน้าคุณจะย้ายไปตามแกน x และ y
ทีละแกน นี่เป็นสิ่งสำคัญที่จะช่วยให้คุณสามารถเคลื่อนที่ไปรอบๆสิ่งกีดขวางที่มีอยู่ได้ 
อย่างไรก็ตามสิ่งสำคัญคือต้องทราบว่านี่ไม่ใช่วิธีที่เร็วที่สุดในการย้ายจากจุดหนึ่งไปยังอีกจุดหนึ่ง หากไม่มีอุปสรรคในภาพด้านบนคุณสามารถย้ายโดยตรงจากจุด 1 ไปยังจุด 3 โดยการย้ายตามแนวทแยงมุม
ในการทำเช่นนี้แขน 6 แกนจะต้องเคลื่อนที่บนแกน x และ y ในเวลาเดียวกัน ในบทเรียนนี้คุณจะดูโปรเจกต์ที่ออกแบบมาเพื่อเคลื่อนแขน 6 แกนไปตามแกนหลายแกนเพื่อช่วยให้คุณเข้าใจได้ดีขึ้นว่าแขน 6 แกนเคลื่อนที่ในพื้นที่ 3 มิติอย่างไร
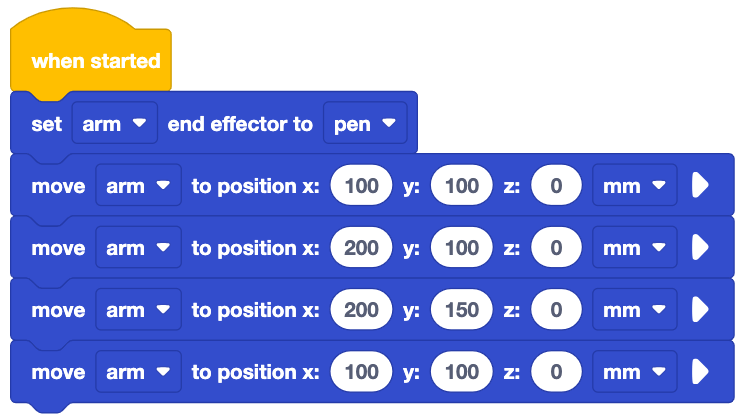
ดูบล็อกในโปรเจกต์นี้ ลองนึกถึงสิ่งที่ท่านได้เรียนรู้เกี่ยวกับการเคลื่อนที่ของแขน 6 แกน คุณคิดว่าแขน 6 แกนจะทำอะไรเมื่อโครงการนี้ดำเนินการ?
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ อธิบายการเคลื่อนไหวของแขน 6 แกนเป็นคำๆ วาดสิ่งที่คุณคิดว่าปากกาบนแขน 6 แกนจะวาด
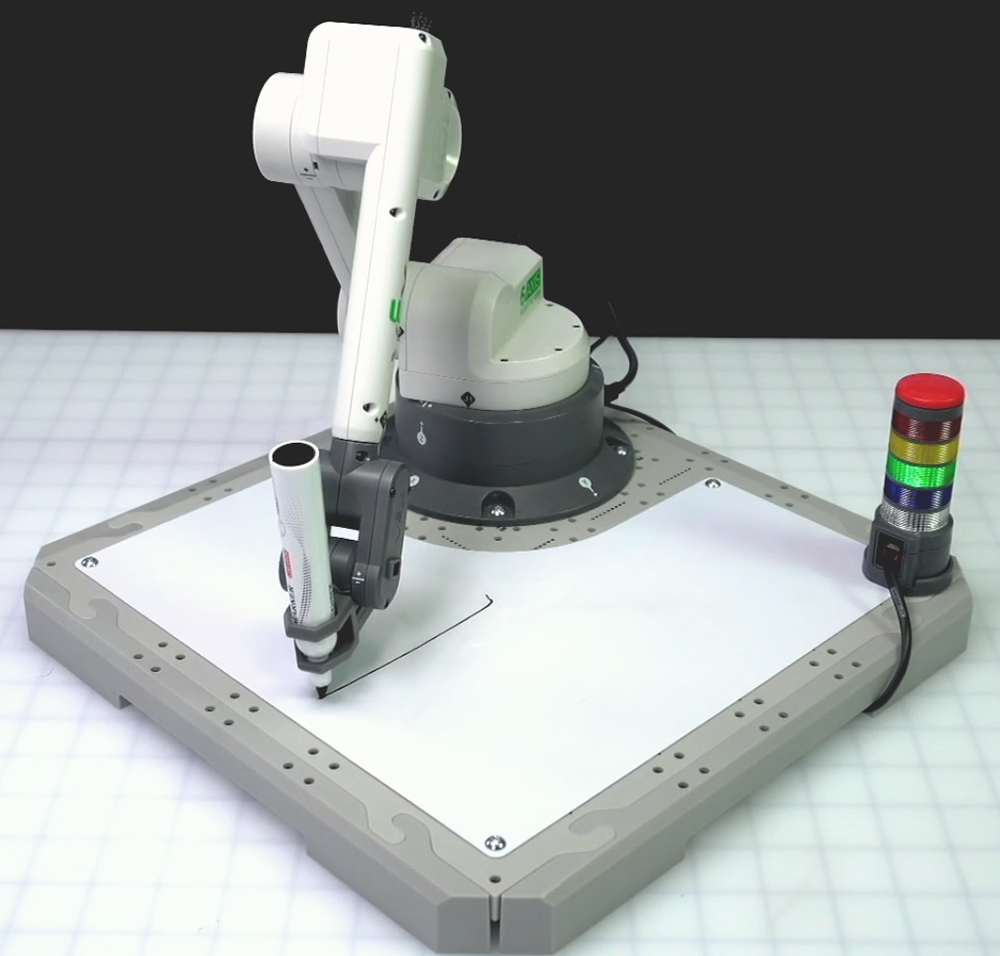
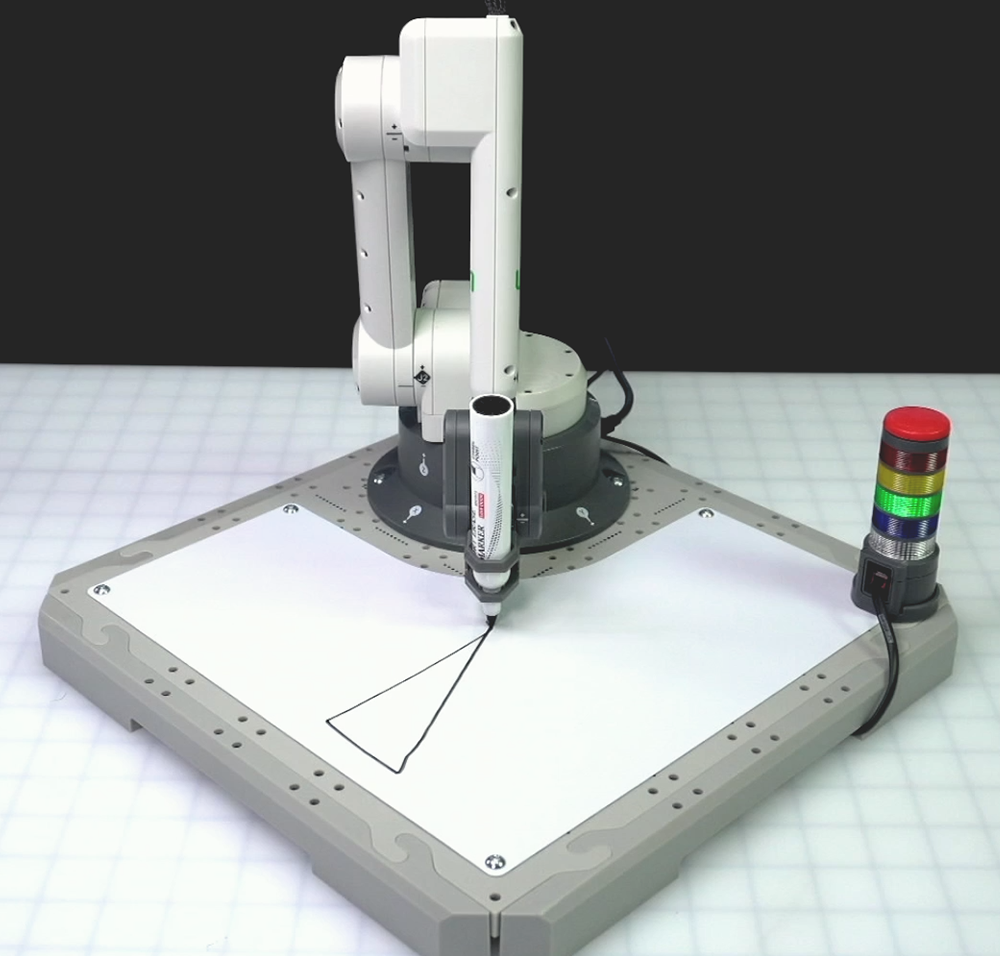
ดูวิดีโอนี้เพื่อดูการทำงานของโปรเจกต์นี้ สังเกตพฤติกรรมของแขน 6 แกน
การเคลื่อนที่จริงของแขน 6 แกนตรงกับการคาดการณ์ของคุณหรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
ปากกาวาดสิ่งที่คล้ายหรือแตกต่างจากที่คุณวาดในสมุดบันทึกวิศวกรรมของคุณหรือไม่? ถ้ามันแตกต่างกันทำไมคุณถึงคิดอย่างนั้น?
การระบุความเคลื่อนไหวในโครงการ
ตอนนี้เรามาแยกแยะพฤติกรรมที่คุณสังเกตเห็นเกี่ยวกับการเคลื่อนที่ของแกน 6 แกนไปตามแกน x และ y การเคลื่อนไหวสองครั้งแรกคล้ายกับวิธีที่คุณนำทางแขน 6 แกนไปรอบๆสิ่งกีดขวางในขณะที่การเคลื่อนไหวครั้งที่สามแตกต่างกัน
ในการวาดด้านที่หนึ่งของสามเหลี่ยมแขน 6 แกนเคลื่อนที่ไปตามแกน x
หากเราดูที่พิกัดในโครงการแขน 6 แกนจะเริ่มต้นที่ (100, 100, 0) และย้ายไปที่ (200, 100, 0) มีเพียงพิกัด x เท่านั้นที่เปลี่ยนแปลงแสดงถึงการเคลื่อนที่ไปตามแกน x เท่านั้น

ในการวาดด้านที่สองของสามเหลี่ยมแขน 6 แกนเคลื่อนที่ไปตามแกน y
เมื่อดูที่พิกัดในโครงการอีกครั้งแขน 6 แกนจะเริ่มต้นบรรทัดนี้ที่ (200, 100, 0) และย้ายไปที่ (200, 150, 0) ตอนนี้มีเพียงการเปลี่ยนแปลงพิกัด y ที่บ่งบอกถึงการเคลื่อนที่ตามแกน y เท่านั้น
ในการวาดด้านที่สามของสามเหลี่ยมแขน 6 แกนเคลื่อนที่เป็นเส้นทแยงมุม มันเคลื่อนที่ไปตามแกน x และ y เพื่อกลับไปยังพิกัดเริ่มต้นของสามเหลี่ยม
เมื่อใช้พิกัดในโครงการเราจะเห็นว่าแขน 6 แกนเริ่มต้นบรรทัดสุดท้ายนี้ที่ (200, 150, 0) และย้ายไปที่ (100, 100, 0) ตอนนี้ ทั้งพิกัด x และ y เปลี่ยนไปแสดงการเคลื่อนที่ไปตามแกนทั้งสองในเวลาเดียวกัน
การใช้คอนโซลมอนิเตอร์คุณจะเห็นได้ว่าค่า x และ y เปลี่ยนไปทีละค่าสำหรับทั้งสองด้านของสามเหลี่ยมจากนั้นทั้งคู่จะเปลี่ยนไปพร้อมกันสำหรับด้านที่สาม
ในบทเรียนถัดไปท่านจะได้เรียนรู้วิธีสร้างโปรเจกต์เพื่อเขียนรหัสแขน 6 แกนเพื่อวาดรูปสามเหลี่ยมสำหรับตัวท่านเอง
ตรวจสอบความเข้าใจของคุณ
ก่อนที่จะย้ายไปยังบทเรียนถัดไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัดไป > เพื่อเรียนรู้วิธีสร้างโปรเจกต์นี้ด้วยตัวคุณเอง