
수업 1: 여러 축을 따라 이동
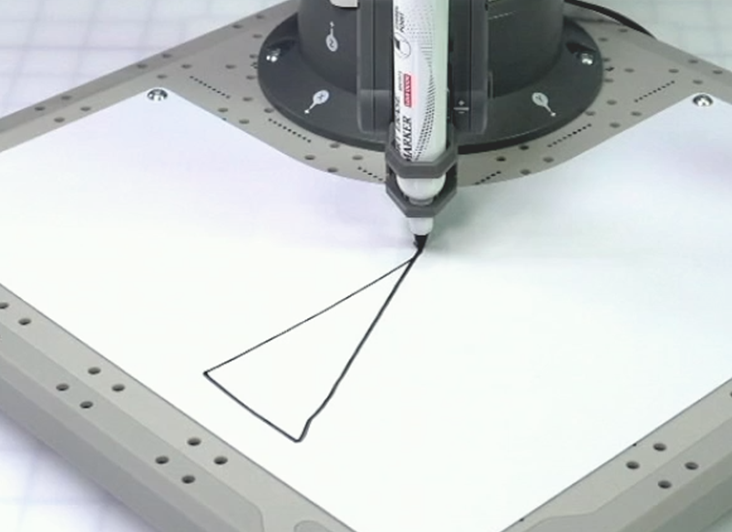
이전 단원에서는 x축과 y축을 따라 개별적으로 움직여 6축 암을 장애물 주변의 다양한 경로점으로 이동시켰습니다. 이 단원에서는 이를 바탕으로 여러 축을 따라 동시에 움직이는 방법을 통합합니다. 펜을 사용하면 삼각형처럼 대각선으로 모양을 그리는 6축 암의 경로를 볼 수 있습니다.
이 수업에서 여러분은 다음을 배우게 됩니다.
- 6축 팔과 관련된 다축 운동에 대해 알아보세요.
- 프로젝트를 살펴보고 6축 팔의 움직임을 예측해 보세요.
- 예측한 결과를 6축 팔의 실제 움직임과 비교해 보세요.
여러 축을 따라 이동
이전 단원에서 6축 팔을 다양한 경로점으로 이동하도록 코딩했을 때, x축과 y축을 따라 개별적으로 이동했습니다. 이는 장애물을 피해 이동할 수 있도록 하는 데 중요했습니다. 
하지만 이것이 항상 한 지점에서 다른 지점으로 이동하는 가장 빠른 방법은 아니라는 점을 알아두는 것이 중요합니다. 위 이미지에 장애물이 없다면 대각선으로 이동하여 지점 1에서 지점 3으로 바로 이동할 수 있습니다.
이렇게 하려면 6축 팔이 x축과 y축에서 동시에 움직여야 합니다. 이 수업에서는 6축 암을 여러 축을 따라 움직이도록 설계된 프로젝트를 살펴보고, 6축 암이 3D 공간에서 어떻게 움직이는지 더 잘 이해하는 데 도움을 드립니다.
이 프로젝트의 블록을 살펴보세요. 6축 암이 어떻게 움직이는지에 대해 배운 내용을 생각해 보세요. 이 프로젝트가 실행되면 6축 암이 어떤 역할을 할 것이라고 생각하시나요?
엔지니어링 노트에 예측 내용을 기록하세요. 6축 암의 움직임을 말로 설명해보세요. 6축 팔에 달린 펜이 그릴 것 같은 그림을 그려보세요.
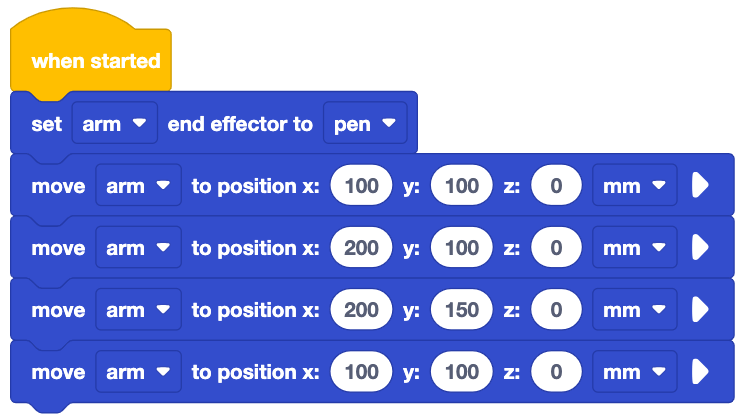
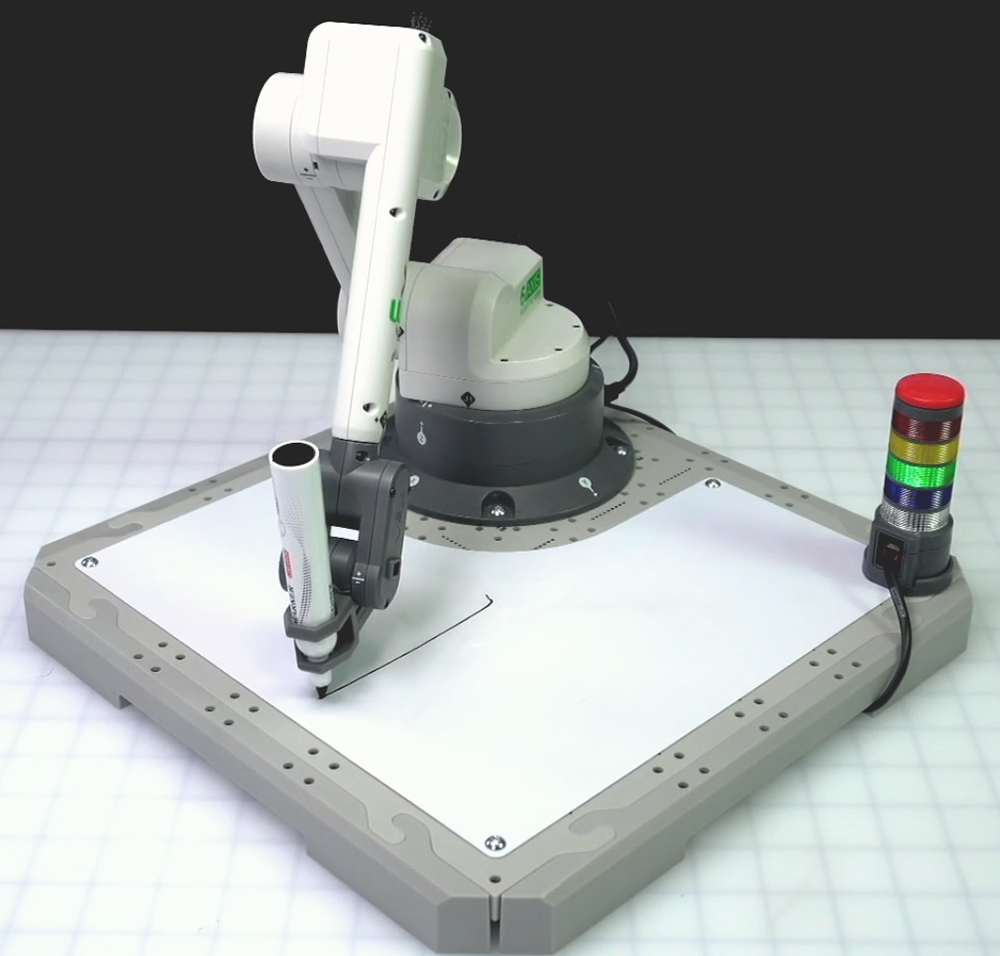
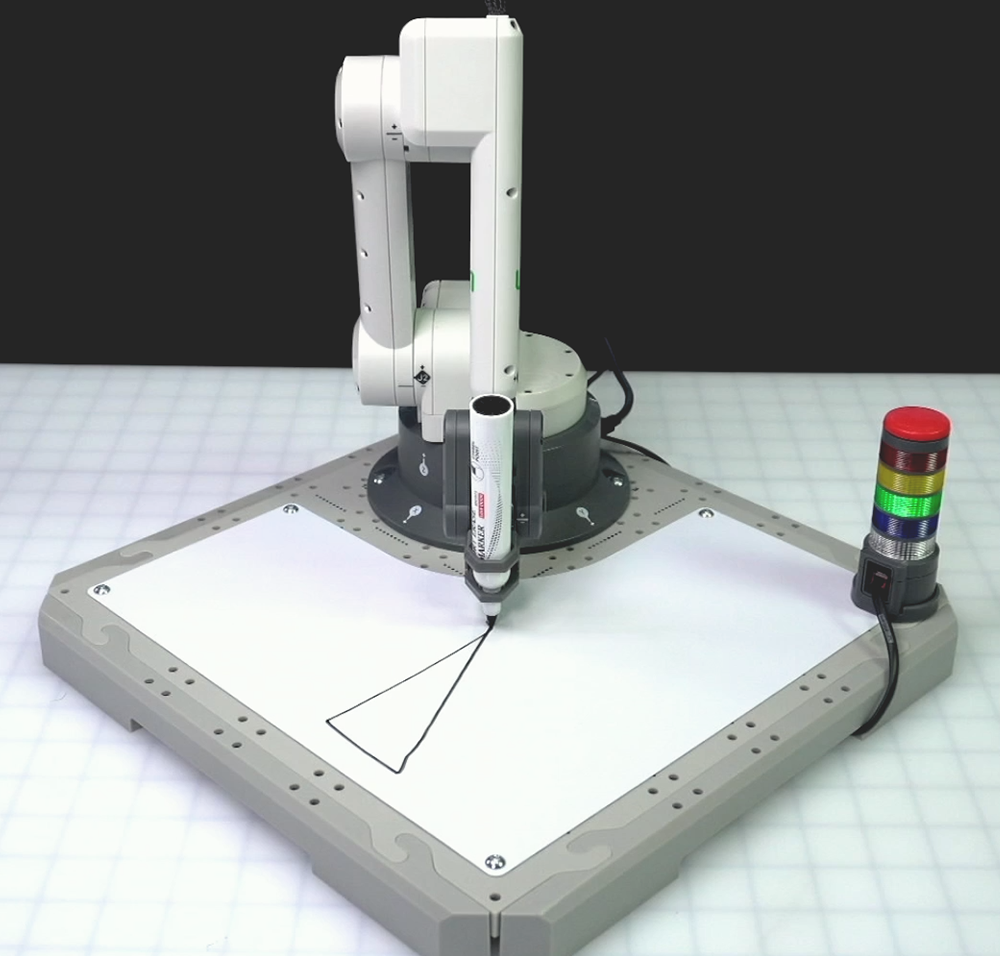
이 프로젝트가 실제로 진행되는 모습을 보려면 이 영상을 시청하세요. 6축 암의 동작을 관찰하세요. 영상에서는 6축 팔이 안전한 위치에서 (100, 100, 0)으로 좌표를 이동한 다음, 4개의 좌표로 각각 이동하여 삼각형을 그립니다.
6축 암의 실제 움직임이 예측과 일치합니까? 왜 그럴까? 아니면 왜 그렇지 않을까?
펜이 엔지니어링 노트에 그린 것과 비슷한 것을 그리나요, 아니면 다른 것을 그리나요? 다르다면, 왜 다르다고 생각하시나요?
프로젝트의 움직임 식별
이제 6축 팔이 x축과 y축을 따라 움직이는 방식과 관련하여 관찰한 동작을 분석해 보겠습니다. 처음 두 동작은 장애물을 피해 6축 팔을 움직이는 방식과 비슷하지만, 세 번째 동작은 다릅니다.
삼각형의 첫 번째 변을 그리려면 6축 암이 x축을 따라 이동합니다.
프로젝트의 좌표를 살펴보면 6축 암은 (100, 100, 0)에서 시작하여 (200, 100, 0)으로 이동합니다. x좌표만 변하므로 x축을 따라서만 움직인다는 것을 나타냅니다.
삼각형의 두 번째 변을 그리려면 6축 암이 y축을 따라 이동합니다.
프로젝트의 좌표를 다시 살펴보면, 6축 암은 (200, 100, 0)에서 이 선을 시작하여 (200, 150, 0)으로 이동합니다. 이제 y 좌표만 바뀌어 y축을 따라 움직이는 것을 나타냅니다.

삼각형의 세 번째 변을 그리려면 6축 암이 대각선으로 움직입니다. 삼각형의 시작 좌표로 돌아가기 위해 x축과 y축을 따라 이동합니다.
프로젝트의 좌표를 사용하면 6축 암이 마지막 선을 (200, 150, 0)에서 시작하여 (100, 100, 0)으로 이동한다는 것을 알 수 있습니다. 이제 x ,y 좌표가 모두 바뀌어 두 축을 따라 동시에 움직이는 것을 나타냅니다.
모니터 콘솔을 사용하면 삼각형의 두 변의 x 및 y 값이 한 번에 하나씩 변경되는 모습과 세 번째 변의 x 및 y 값이 동시에 변경되는 모습을 볼 수 있습니다. 이 영상을 시청하면 모니터 콘솔 내에서 x와 y 값이 실시간으로 변경되는 것을 볼 수 있습니다.
다음 수업에서는 6축 팔을 코딩하여 직접 삼각형을 그리는 프로젝트를 만드는 방법을 알아봅니다.
이해도 확인
다음 수업으로 넘어가기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업의 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
이 프로젝트를 직접 만드는 방법을 알아보려면다음 >선택하세요.