
पाठ 3: लुप्त निर्देशांक ढूँढना
पिछले पाठों में, आपने सीखा कि पेन होल्डर टूल से व्हाइटबोर्ड पर त्रिभुज कैसे बनाया जाता है, जहाँ त्रिभुज के सभी बिंदु दिए गए थे। हालाँकि, यदि त्रिभुज के कुछ बिंदु नहीं दिए गए हैं, तो 6-अक्ष भुजा को कई अक्षों में गति करने के लिए उन्हें गणितीय रूप से निर्धारित करने की आवश्यकता होगी।
इस पाठ में, आप त्रिभुज बनाने के लिए त्रिभुज के दो लुप्त निर्देशांक ज्ञात करेंगे। इस पाठ के अंत में, आप सीखी गई बातों को त्रिभुज पर आधारित वर्ग बनाने के लिए लागू करेंगे।
लुप्त निर्देशांक ढूँढना
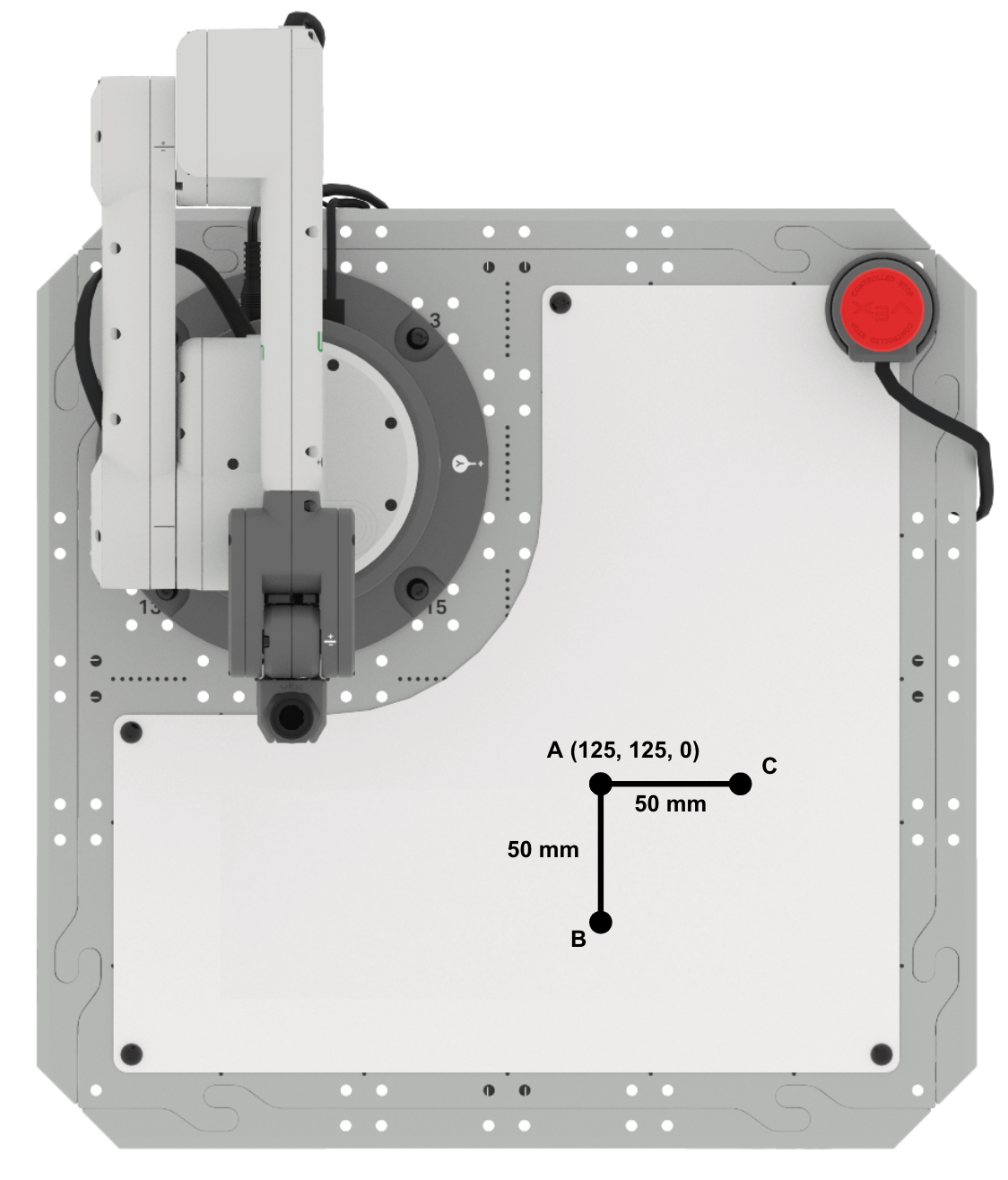
6-अक्ष भुजा एक त्रिभुज बनाने जा रही है। इस त्रिभुज के बारे में हम जो जानकारी जानते हैं वह इस प्रकार है:
- बिंदु A (125, 125, 0) है।
- प्रत्येक पक्ष की लंबाई 50 मिमी है।
- त्रिभुज ABC एक समकोण त्रिभुज है (एक 90º कोण वाला त्रिभुज)।
- इस कोण के विपरीत भुजा सबसे लम्बी भुजा होती है, जिसे कर्ण कहते हैं। अन्य दो पक्षों को पैर कहा जाता है।
इस जानकारी का उपयोग करके, हम त्रिभुज बनाने के लिए दो अंत बिंदु (बिंदु B और C) ज्ञात कर सकते हैं।
बिंदु B और C को खोजने और त्रिभुज बनाने के लिए नीचे दिए गए चरणों का पालन करें।
बिंदु B ढूँढना
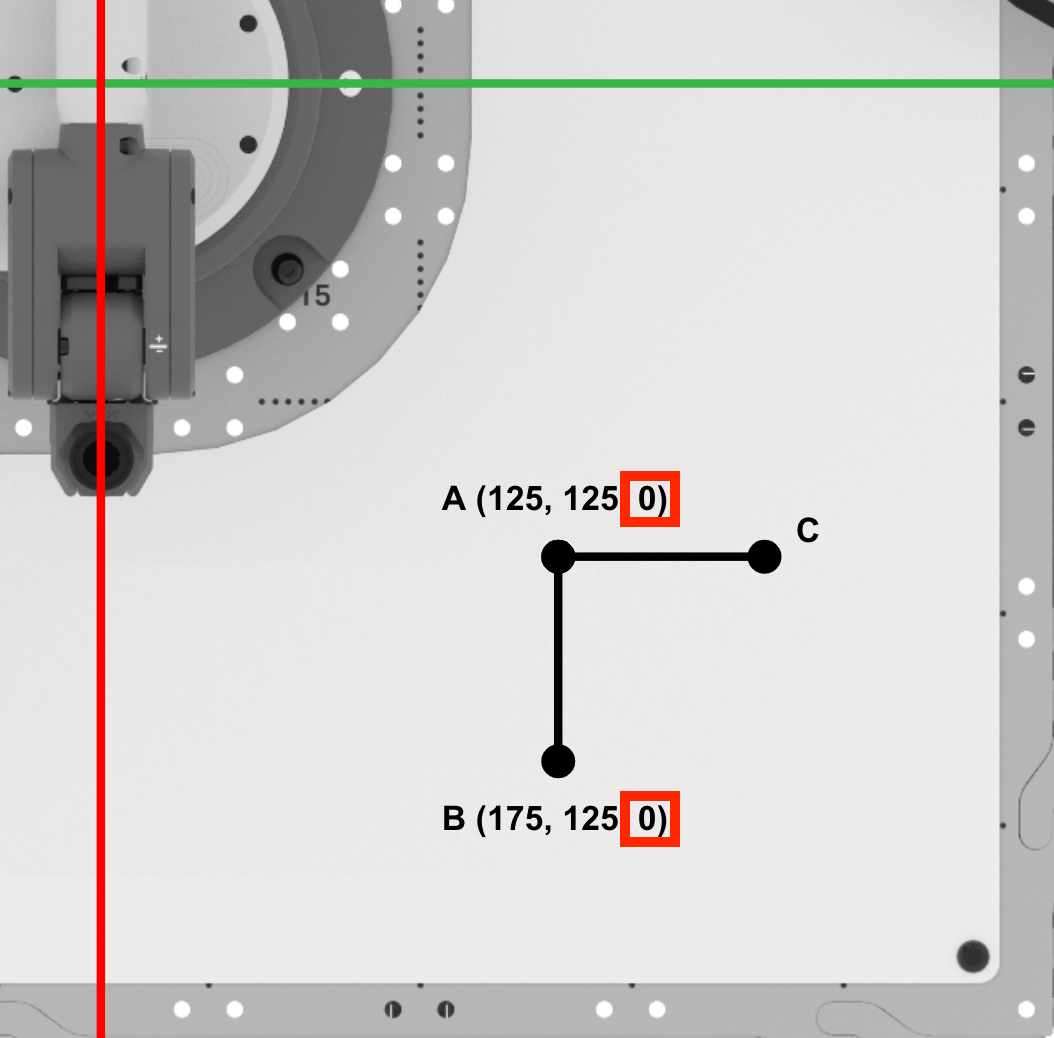
अपनी इंजीनियरिंग नोटबुक में त्रिभुज के बारे में ज्ञात जानकारी का रेखाचित्र बनाइये।
बिंदु A लगभग (125, 125, 0) पर स्थित है।
बिंदु A से बिंदु B की दूरी लगभग 50 मिमी है। बिंदु A से बिंदु C तक की दूरी लगभग 50 मिमी है। इनमें से प्रत्येक दूरी त्रिभुज की भुजाओं की लंबाई के अनुरूप होती है।
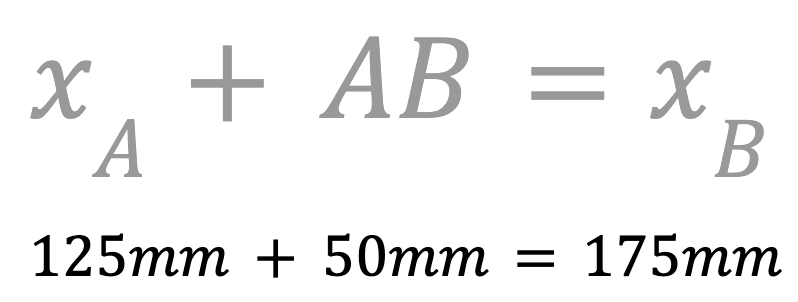
बिंदु B का x-निर्देशांक ज्ञात कीजिए। बिंदु B का x-निर्देशांक ज्ञात करने के लिए AB की लंबाई को बिंदु A के x-निर्देशांक में जोड़कर ऐसा किया जा सकता है।
बिंदु B का x-मान 175 मिमी है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
अब हम बिंदु B का y-निर्देशांक ज्ञात करेंगे।
चूँकि बिंदु A और B रेखा y=125 मिमी के अनुदिश हैं, बिंदु B का y-निर्देशांक बिंदु A (125 मिमी) के समान है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
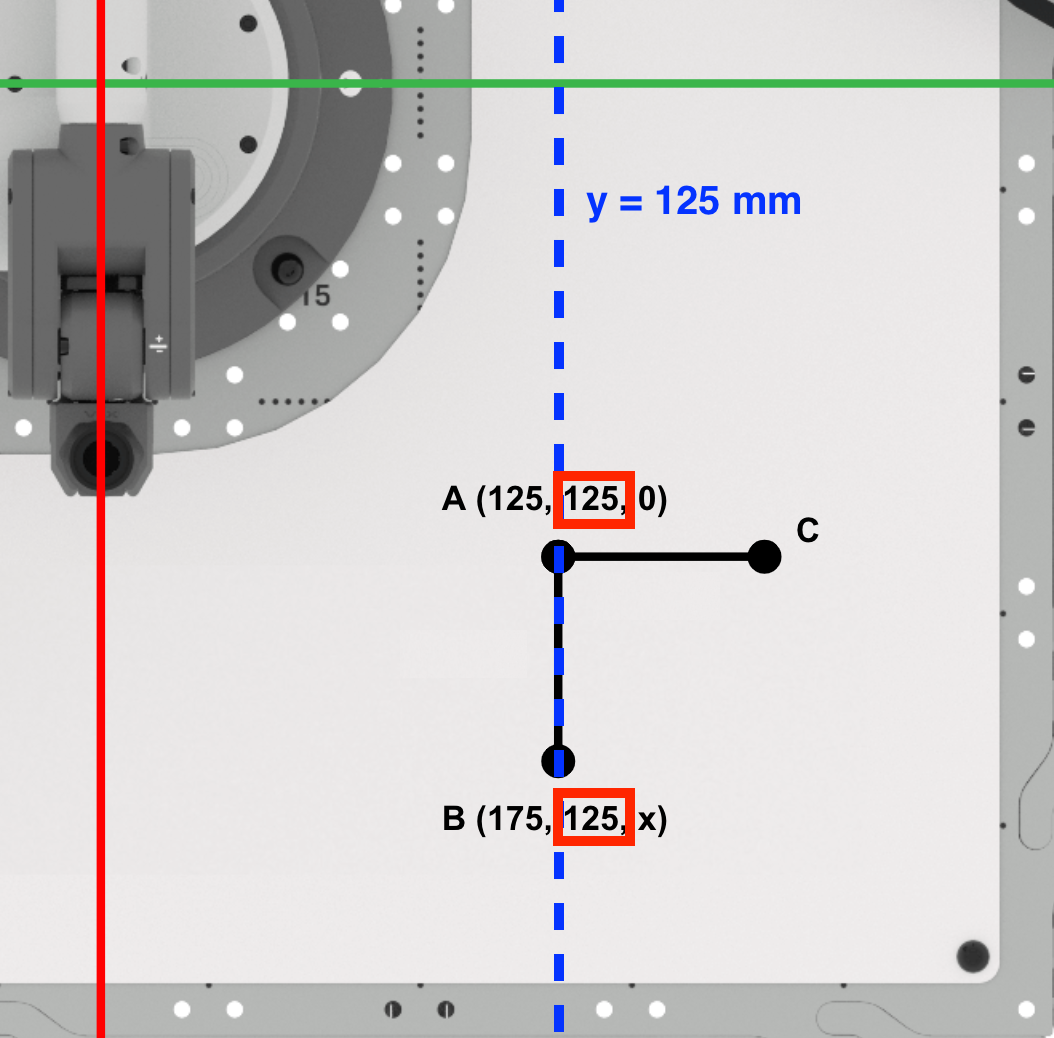
चूँकि पेन बिंदु A और B के बीच नहीं उठ रहा है, इसलिए बिंदु B का z-निर्देशांक शून्य रहेगा।
बिंदु B (175, 125, 0) है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
बिंदु C ढूँढना
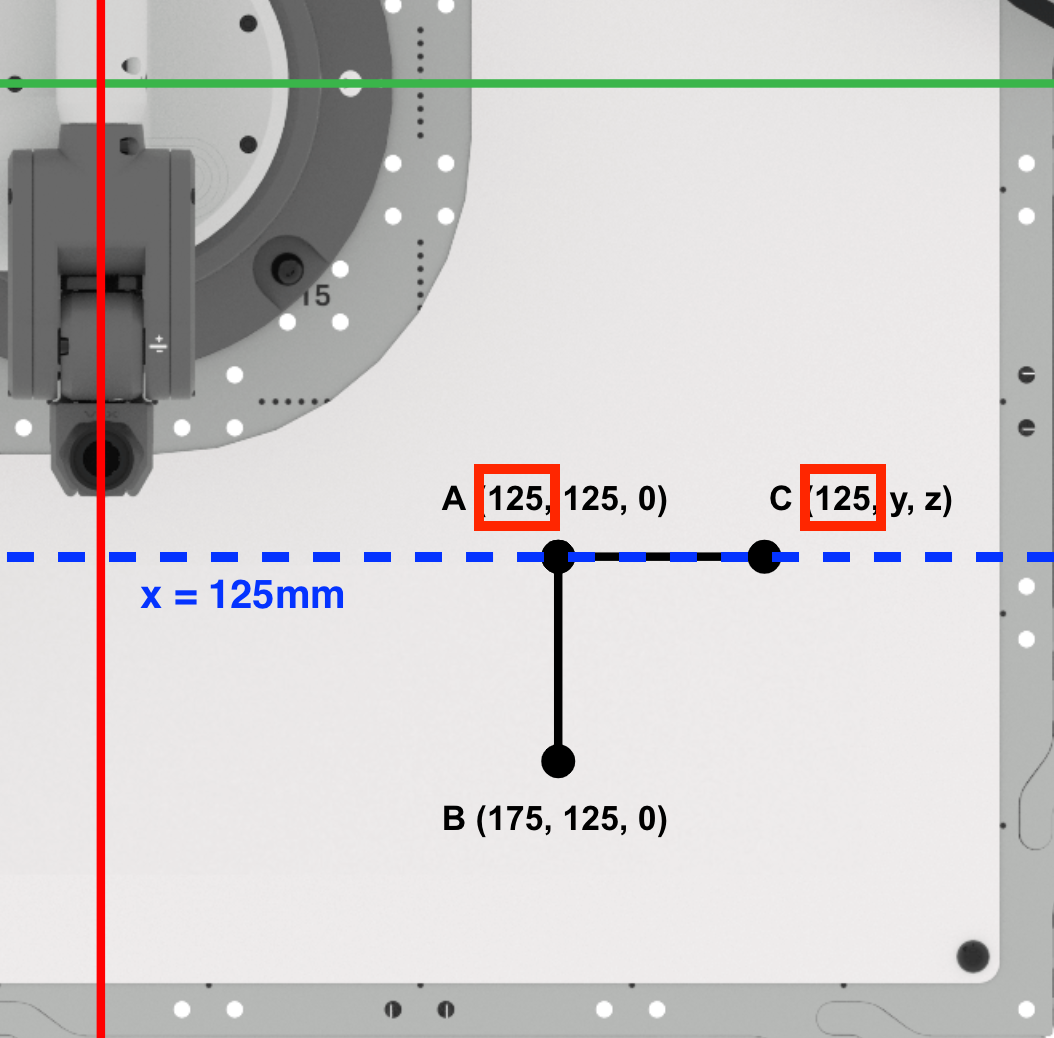
बिंदु C का x-निर्देशांक ज्ञात कीजिए।
चूँकि बिंदु A और C रेखा x=125 मिमी के अनुदिश हैं, बिंदु C का x-मान बिंदु A (125 मिमी) के समान है।
इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
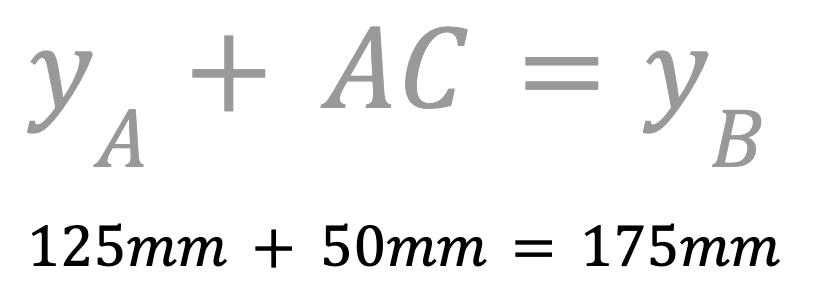
इसके बाद, बिंदु C का y-निर्देशांक ज्ञात कीजिए।
चूँकि हम एक समकोण त्रिभुज बना रहे हैं, हम जानते हैं कि भुजा AC, y-अक्ष के समान्तर होगी। बिंदु C का y-निर्देशांक ज्ञात करने के लिए AC की लंबाई को बिंदु A के y-निर्देशांक में जोड़ें।
बिंदु C का y-निर्देशांक 175 मिमी है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
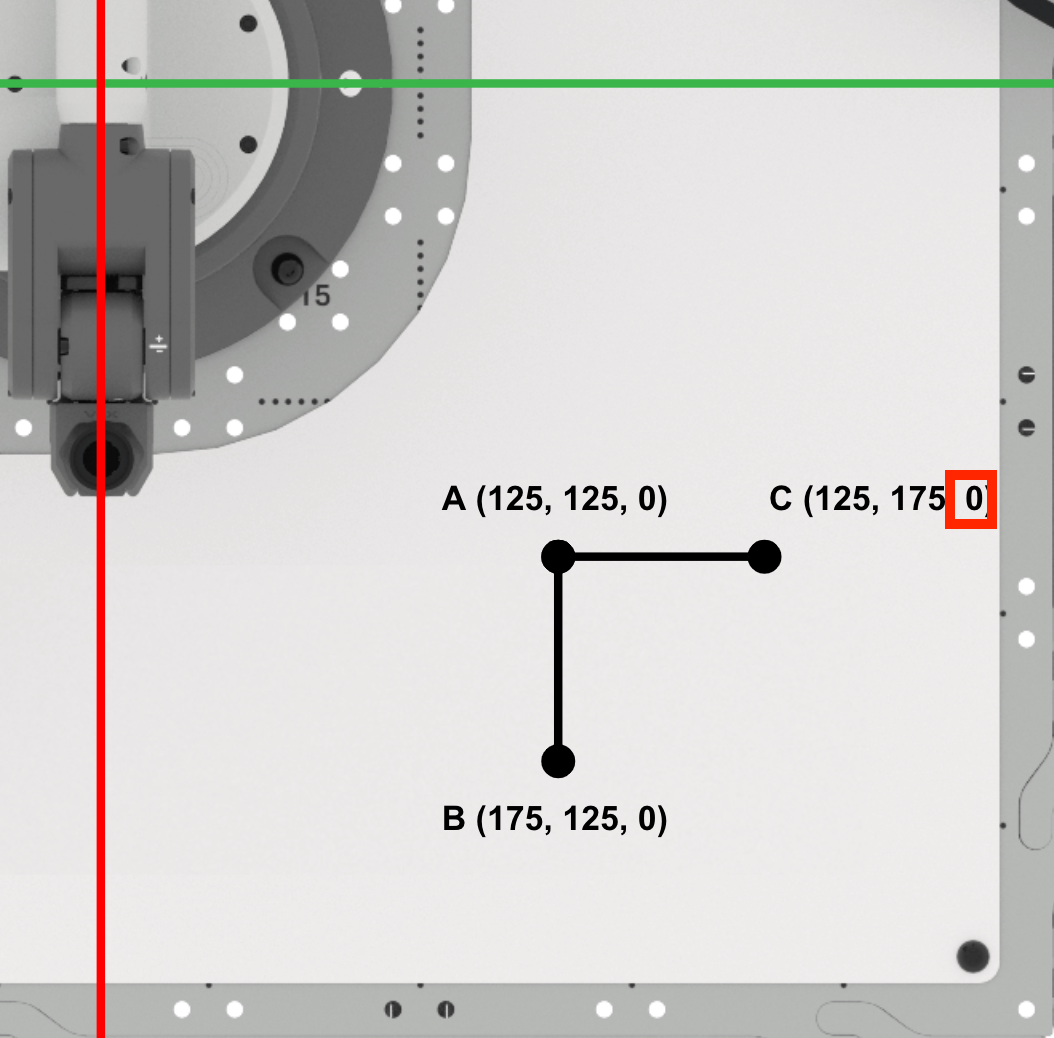
चूँकि पेन बिंदु A और C के बीच नहीं उठ रहा है, इसलिए बिंदु C का z-निर्देशांक शून्य रहेगा।
बिंदु C (125, 175, 0) है। इसे अपनी इंजीनियरिंग नोटबुक में रिकॉर्ड करें।
बिंदु A, B और C को जोड़ने के लिए 6-अक्ष भुजा को कोड करना
अब जबकि आपने बिंदु B और C के निर्देशांक निर्धारित कर लिए हैं, तो अब समय आ गया है कि बिंदु A, B और C को जोड़ने के लिए 6-अक्ष भुजा के लिए VEXcode EXP प्रोजेक्ट बनाया जाए, ताकि त्रिभुज बनाया जा सके।
इस वीडियो में दिए गए चरणों का पालन करकेनया ब्लॉक प्रोजेक्टखोलें। वीडियो क्लिप में, टूलबार में फ़ाइल का चयन किया जाता है, और फिर नया ब्लॉक प्रोजेक्ट चुना जाता है। एक डायलॉग बॉक्स खुलेगा जिसमें दो विकल्प होंगे, बाईं ओर EXP ब्रेन और दाईं ओर आर्म। आर्म विकल्प का चयन किया जाता है, और कार्यस्थान में एक नया प्रोजेक्ट खुलता है।
स्टैक में एक टिप्पणी ब्लॉक जोड़ें और 'एक त्रिभुज बनाने के लिए तैयार हो जाओ' टाइप करें।
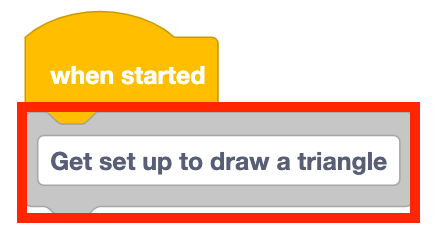
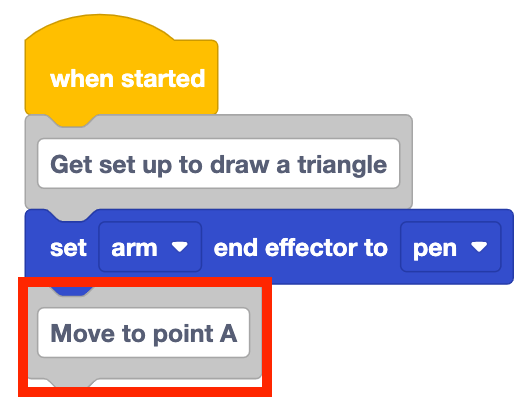
स्टैक में सेट एंड इफ़ेक्टर ब्लॉक जोड़ें और इसे 'पेन' पर सेट करें।

स्टैक में एक टिप्पणी ब्लॉक जोड़ें और 'बिंदु A पर ले जाएँ' टाइप करें।
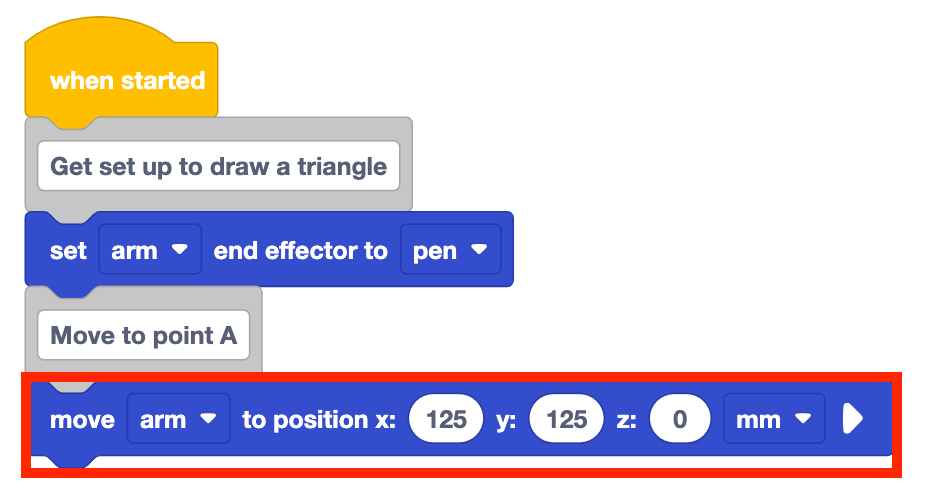
टिप्पणी ब्लॉक के नीचे स्टैक में स्थिति ब्लॉक पर जाएँ जोड़ें।
स्थिति ब्लॉक के पैरामीटर्स को बिंदु A के निर्देशांकों पर सेट करें, जो आपके इंजीनियरिंग नोटबुक में दर्ज है।
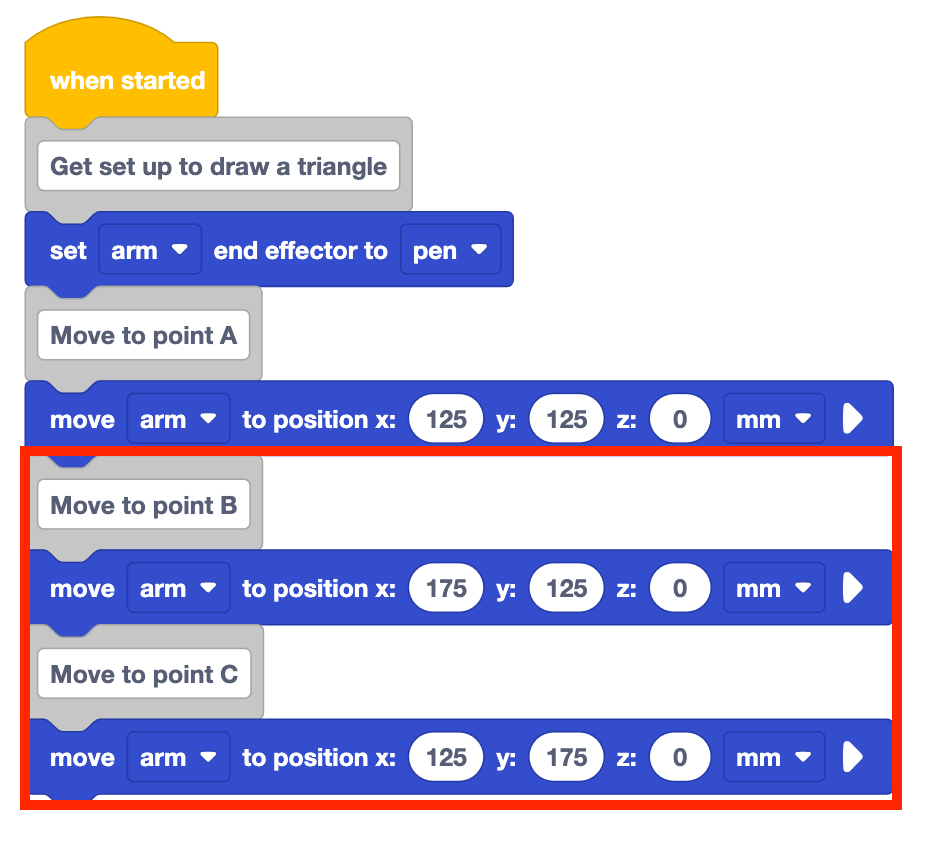
टिप्पणी और जोड़ें बिंदु B और C के लिए स्थिति ब्लॉक पर जाएं।
के पैरामीटर्स को स्थिति ब्लॉकों पर ले जाएं, बिंदु B और C के निर्देशांकों पर सेट करें, जो आपके इंजीनियरिंग नोटबुक में दर्ज किए गए थे।
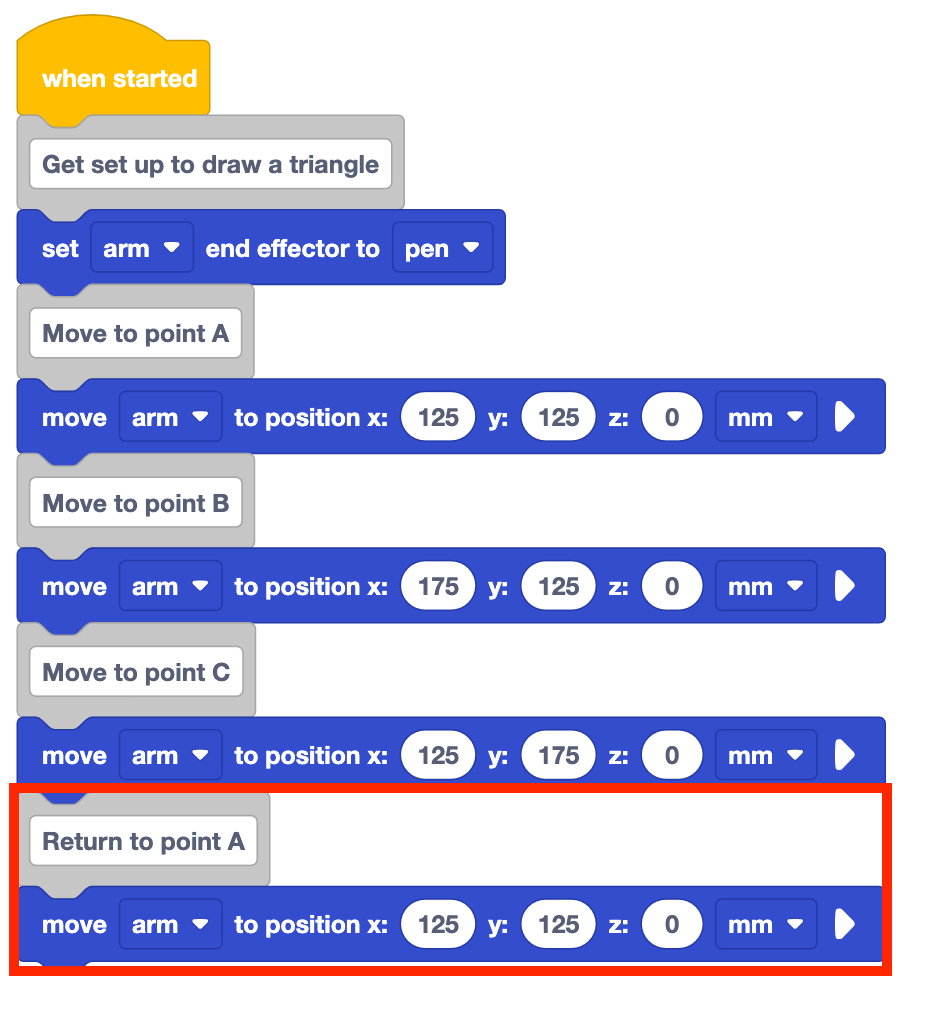
इस परियोजना में त्रिभुज की केवल दो भुजाएँ ही खींची जाएंगी। त्रिभुज को पूरा करने के लिए 6-अक्ष भुजा को बिंदु A पर वापस जाना होगा।
स्टैक में एक टिप्पणी ब्लॉक जोड़ें और इसे 'बिंदु A पर लौटें' लेबल करें, साथ ही एक स्थिति ब्लॉक जोड़ें।
के पैरामीटर सेट करें, ब्लॉक को बिंदु A के निर्देशांक पर स्थिति पर ले जाएं।
अपने प्रोजेक्ट का नाम बदलना और उसे अपने डिवाइस पर सहेजना सुनिश्चित करें।
सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है। अपना प्रोजेक्ट चलाएँ.
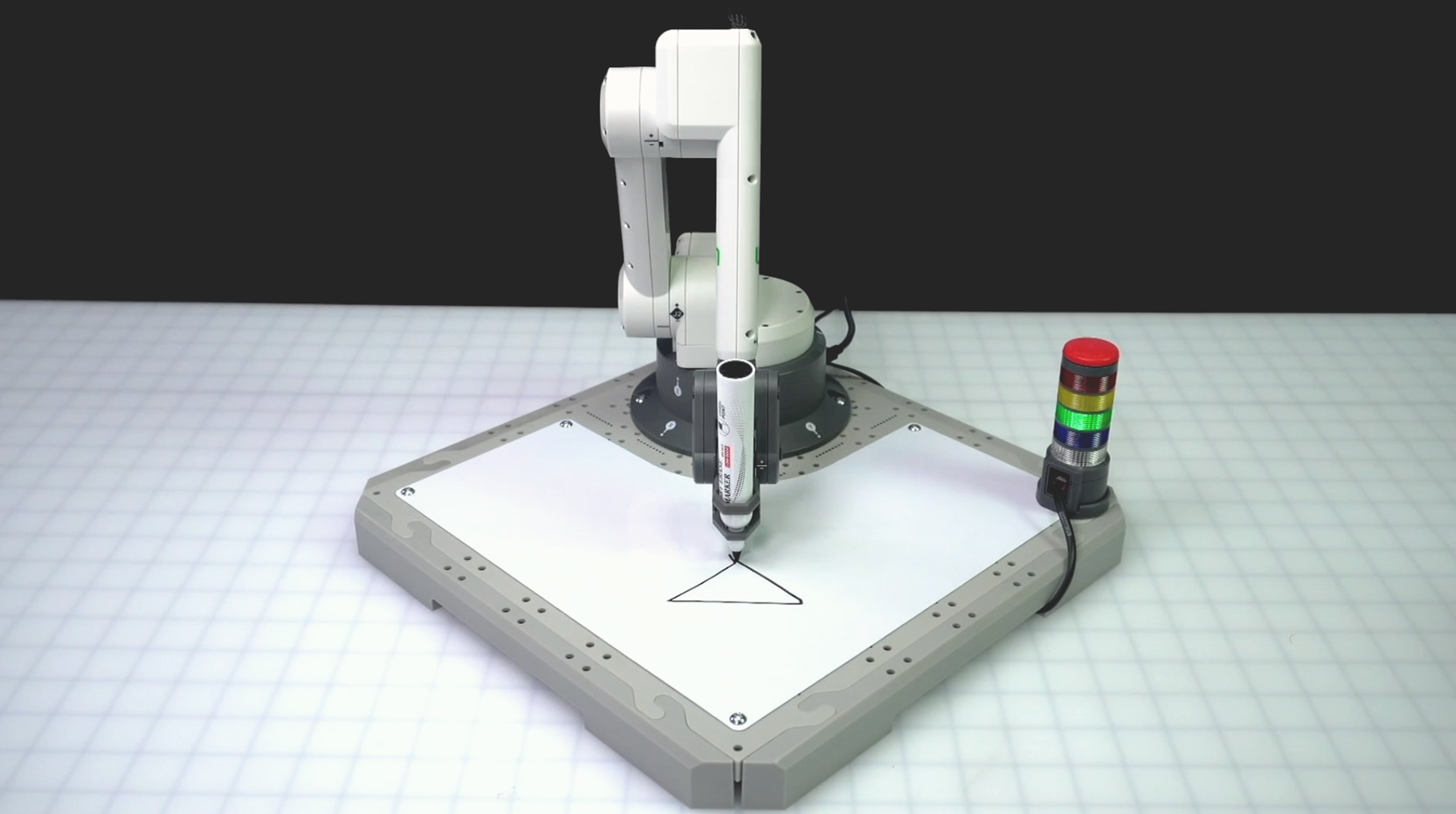
6-अक्ष भुजा बिंदु A से शुरू होगी, फिर त्रिभुज की पहली भुजा खींचने के लिए बिंदु B पर जाएगी। इसके बाद यह बिंदु C तक जाएगा और त्रिभुज की दूसरी भुजा खींचेगा। इसके बाद 6-अक्ष भुजा तीसरी भुजा खींचकर त्रिभुज को पूरा करने के लिए बिंदु A पर वापस जाएगी।
जब 6-अक्ष भुजा चलना समाप्त कर दे तो परियोजना को रोक दें।
गतिविधि
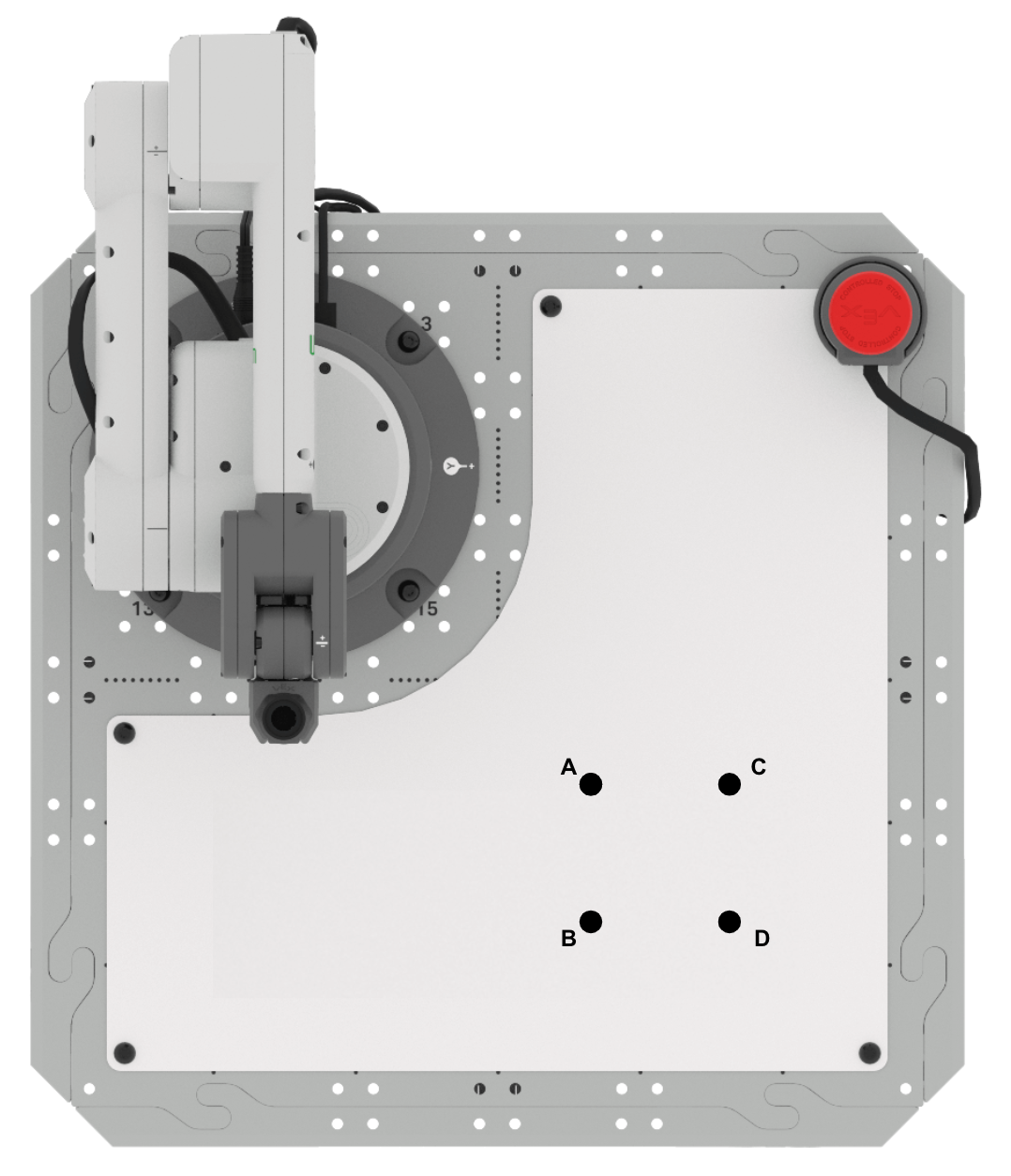
अब जब आपने सीख लिया है कि प्रारंभिक निर्देशांक और दो भुजाओं की लंबाई दिए जाने पर लुप्त निर्देशांक कैसे ज्ञात करें, तो आप इस कौशल का अभ्यास करेंगे। इस गतिविधि में, आप इस पाठ से प्राप्त परियोजना के आधार पर एक वर्ग बनाएंगे।
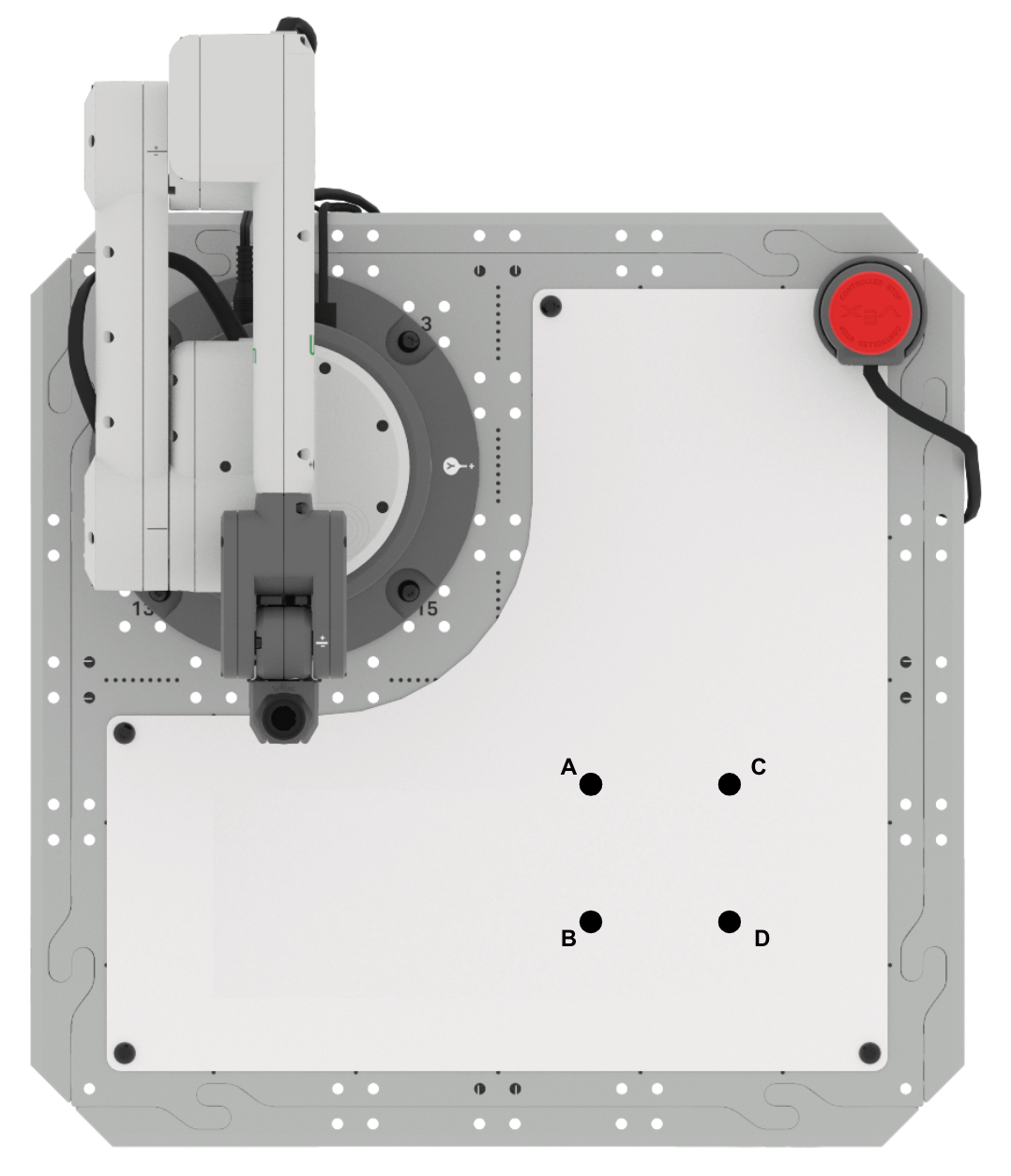
- सेटअप: अपनी इंजीनियरिंग नोटबुक में ऊपर दिखाए अनुसार बिंदु A, B, C और D बनाएं। आप इस पाठ से त्रिभुज ABC के बारे में जानकारी का उपयोग लुप्त बिंदु D को खोजने में कर सकते हैं।
- बिंदु A (125, 125, 0) पर स्थित है
- बिंदु B (175, 125, 0) पर स्थित है
- बिंदु C (125, 175, 0) पर स्थित है
- भुजाओं की लंबाई AB और AC 50 मिमी है
- गतिविधि: बिंदु D के निर्देशांक ज्ञात कीजिए। इस पाठ से प्राप्त परियोजना के आधार पर एक वर्ग बनाइए।
- एक बार जब आप अपनी परियोजना को संपादित कर लें, तो उसे परीक्षण के लिए चलाएँ। क्या 6-अक्ष भुजा वर्ग की सभी चारों भुजाओं को सफलतापूर्वक खींचती है? यदि नहीं, तो अपनी परियोजना को संशोधित करें और पुनः परीक्षण करें।
- अपने इंजीनियरिंग नोटबुक में बिंदु D को खोजने के लिए आपके द्वारा उपयोग की गई प्रक्रिया को रिकॉर्ड करें, और अपने VEXcode प्रोजेक्ट में बिंदु D का उपयोग कैसे किया, इसके बारे में विवरण शामिल करें।
अपनी समझ की जाँच करें
अगले पाठ पर जाने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
विभिन्न दिशाओं में अधिक त्रिभुज बनाने का तरीका जानने के लिए अगला > चुनें।