
पूरा
इस पाठ में, आपने अपने रोबोट को क्यूब्स इकट्ठा करने और स्कोर करने के लिए चलाने के लिए स्वायत्त और ड्राइवर नियंत्रण कार्यक्रमों का उपयोग करने के बारे में सीखा और यह भी सीखा कि VEXcode IQ में कई प्रोग्राम स्लॉट का उपयोग कैसे और क्यों किया जाता है। आपने ड्राइवर नियंत्रण और स्वायत्त गतिविधियों दोनों के लिए अपनी रणनीति को अनुकूलित करने का अभ्यास किया है, और अब आप विभाजित निर्णय चुनौती में जो सीखा है उसे लागू करने के लिए तैयार हैं!
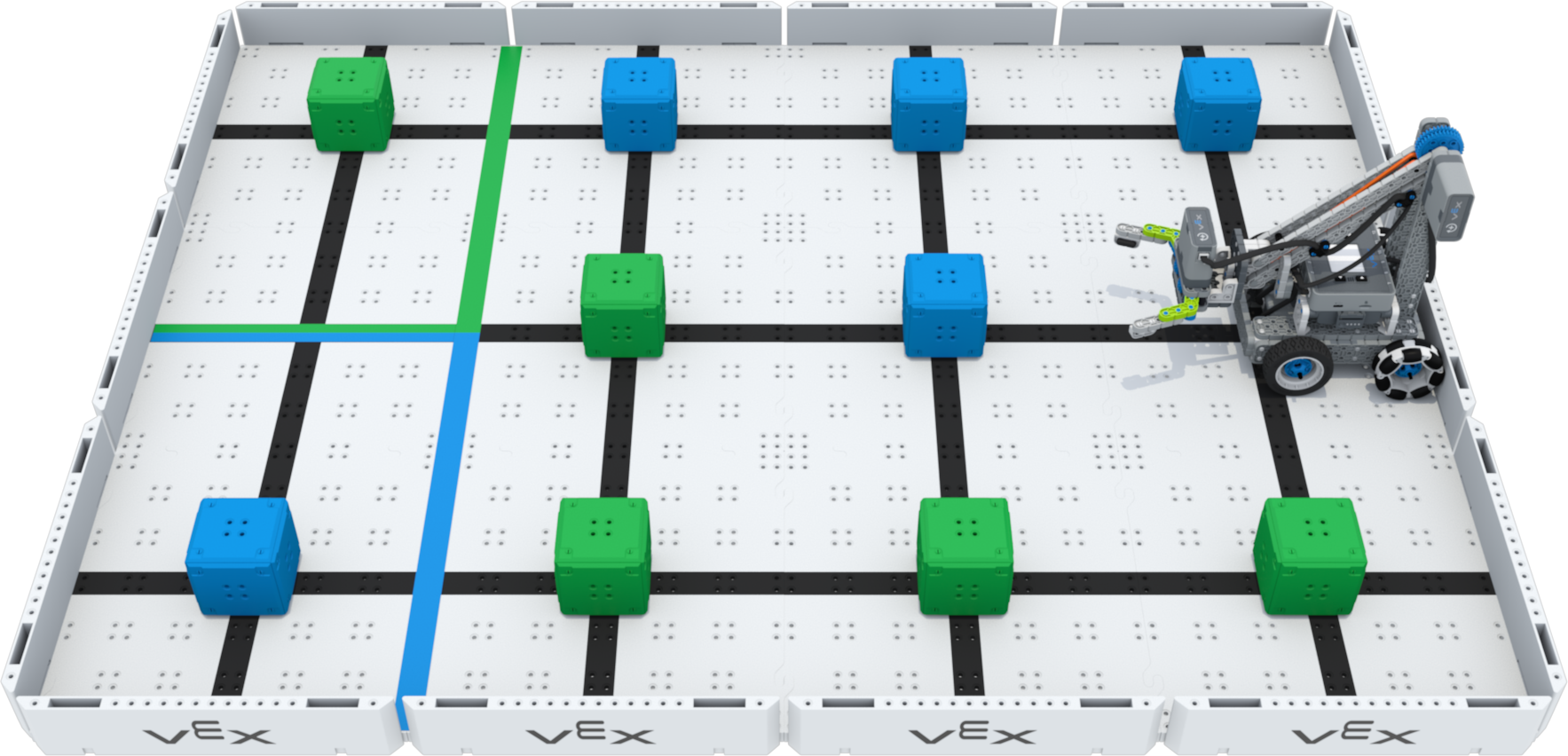
इस चुनौती का लक्ष्य दो 30-सेकंड के रन में क्यूब्स को पकड़कर, हिलाकर और स्कोर करके उच्चतम स्कोर प्राप्त करना है। एक रन चालक नियंत्रण होगा, और दूसरा स्वायत्त। नीचे दिया गया एनीमेशन यह दर्शाता है कि मैदान को किस प्रकार तैयार किया जाना चाहिए, तथा दो रन कैसे खेले और बनाए जाने चाहिए। जो रोबोट सबसे अधिक अंक प्राप्त करता है, वह जीत जाता है।
नीचे दिए गए एनीमेशन में, क्यूब कलेक्टर फील्ड पर दो हरे और दो नीले क्यूब हैं। रोबोट नीले स्कोरिंग क्षेत्र में एक नीले घन को उठाता है और ढेर लगाता है, तथा फिर हरे स्कोरिंग क्षेत्र में एक हरे घन को उठाता है। ड्राइवर नियंत्रण स्कोर की गणना की जाती है, तथा चुनौती के स्वायत्त भाग के लिए क्षेत्र को रीसेट किया जाता है।
रोबोट सबसे पहले नीले स्कोरिंग क्षेत्र में एक नीले घन को उठाता है और उसे एक ढेर में रखता है। समय बीतता जाता है, और अंतिम हरा घन, पहले से ही हरे स्कोरिंग क्षेत्र में मौजूद दो घनों के ऊपर रखा जाता है। स्वायत्त स्कोर और फिर अंतिम संयुक्त स्कोर का मिलान किया जाता है।
विभाजित निर्णय चुनौती को पूरा करने के लिए इस दस्तावेज़ में दिए गए चरणों का पालन करें।
एक बार जब आप विभाजित निर्णय चुनौती पूरी कर लें, तो अपने शिक्षक से संपर्क करें। सुनिश्चित करें कि आपने चुनौती के परिणामों को अपनी इंजीनियरिंग नोटबुक में दर्ज कर लिया है।
समापन परावर्तन
अब जबकि आपने रणनीति बना ली है और विभाजित निर्णय चुनौती में भाग ले लिया है, तो यह समय है कि आप इस पाठ में जो सीखा और किया है उस पर विचार करें। अपने चिंतन को शुरू करने के लिए अपनी इंजीनियरिंग नोटबुक में एक नया पृष्ठ शुरू करें।
अपनी इंजीनियरिंग नोटबुक में निम्नलिखित प्रत्येक अवधारणा पर स्वयं को नौसिखिया, प्रशिक्षु या विशेषज्ञ के रूप में मूल्यांकन करें। प्रत्येक अवधारणा के लिए आपने स्वयं को वह रेटिंग क्यों दी, इसका संक्षिप्त विवरण दीजिए:
- IQ (द्वितीय पीढ़ी) ब्रेन और VEXcode IQ पर कस्टम ड्राइवर नियंत्रण के अपने ज्ञान को लागू करना ताकि मैं अपने रोबोट को स्प्लिट डिसीजन चैलेंज में उच्चतम संभव स्कोर प्राप्त करने के लिए चला सकूं।
- एक परियोजना की योजना बनाना और उसे क्रियान्वित करना, जिसमें मेरा रोबोट विभाजित निर्णय चुनौती को स्वायत्त रूप से पूरा कर सके
- विभाजित निर्णय चुनौती के लिए एक समग्र रणनीति बनाने के लिए अपनी टीम के सदस्यों के साथ सहयोग करना
यह निर्धारित करने में सहायता के लिए कि आप किस श्रेणी में आते हैं, इस तालिका का उपयोग करें।
| विशेषज्ञ | मुझे लगता है कि मैंने इस अवधारणा को पूरी तरह से समझ लिया है और मैं इसे किसी और को भी सिखा सकता हूँ। |
| शिक्षु | मुझे लगता है कि मैंने चुनौती में भाग लेने के लिए अवधारणा को पर्याप्त रूप से समझ लिया है। |
| नौसिखिए | मुझे लगता है कि मैं अवधारणा को समझ नहीं पाया और मुझे नहीं पता कि चुनौती को कैसे पूरा किया जाए। |
अगला क्या है?
इस पाठ में आपने ड्राइवर नियंत्रण को अनुकूलित करने के बारे में सीखा। आपने ड्राइवर नियंत्रण और स्वायत्तता का उपयोग करके गतिविधियों को पूरा करने के लिए रणनीति विकसित करने का अभ्यास किया। अब क्यूब कलेक्टर प्रतियोगिता में भाग लेने का समय आ गया है!
अगले पाठ में आप:
- प्रतियोगिता के नियमों पर गौर करें
- खेल की रणनीति विकसित करें
- क्यूब कलेक्टर प्रतियोगिता में भाग लें!
पाठ अवलोकन पर वापस जाने के लिए < पाठ पर लौटें का चयन करें।
पाठ 5 पर जारी रखने के लिए अगला पाठ > चुनें और जानें कि क्यूब कलेक्टर प्रतियोगिता में कैसे भाग लें!