
Cạnh tranh
Trong bài học này, bạn đã học về cách sử dụng các chương trình điều khiển tự động và điều khiển bằng trình điều khiển để điều khiển robot thu thập và ghi điểm khối lập phương, đồng thời tìm hiểu cách thức và lý do sử dụng nhiều khe cắm chương trình trong VEXcode IQ. Bạn đã thực hành tối ưu hóa chiến lược của mình cho cả khả năng điều khiển của người lái và chuyển động tự động, và giờ bạn đã sẵn sàng áp dụng những gì đã học vào Thử thách Quyết định Chia đôi!
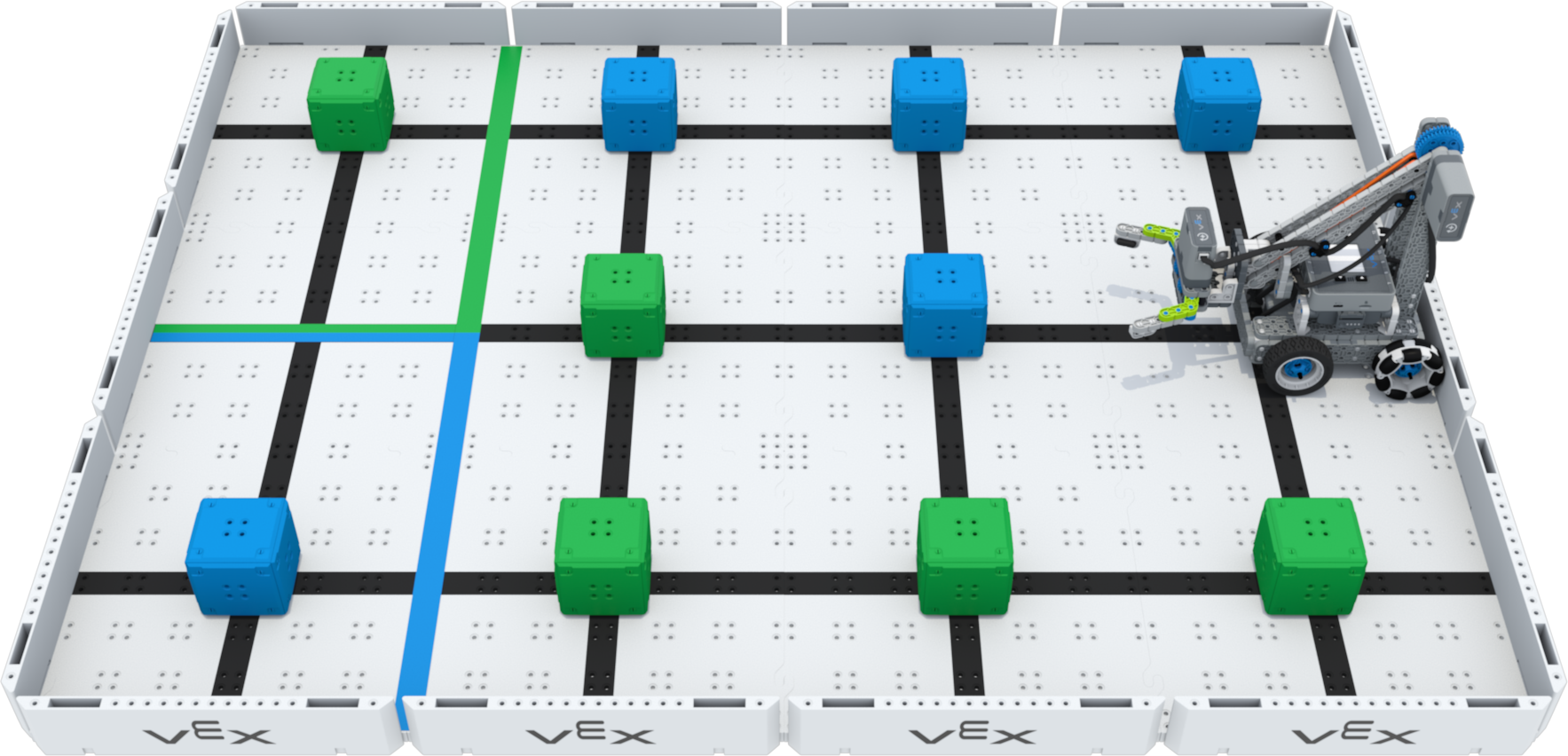
Mục tiêu của thử thách này là đạt được số điểm cao nhất bằng cách lấy, di chuyển và ghi bốn vòng trên một cột trung bình trong hai lần chạy 30 giây. Một lần chạy sẽ là điều khiển người lái và lần chạy tự động khác. Hình ảnh động dưới đây cho thấy cách thiết lập Trường và cách hai lần chạy được phát và ghi điểm. Robot nào nhận được tổng số điểm nhiều nhất sẽ giành chiến thắng.
Trong hình ảnh động bên dưới, có hai khối lập phương màu xanh lá cây và hai khối lập phương màu xanh lam trên Trường thu thập khối lập phương. Robot sẽ di chuyển để nhặt và xếp một khối lập phương màu xanh lam vào khu vực ghi điểm màu xanh lam, sau đó xếp một khối lập phương màu xanh lá cây vào khu vực ghi điểm màu xanh lá cây. Điểm kiểm soát của người lái xe được tính và sân sẽ được thiết lập lại cho phần thử thách tự động.
Đầu tiên, robot sẽ nhặt và xếp một khối lập phương màu xanh vào khu vực ghi điểm màu xanh. Thời gian trôi qua, khối lập phương màu xanh lá cây cuối cùng được xếp chồng lên hai khối lập phương đã có trong khu vực ghi điểm màu xanh lá cây. Điểm tự đánh giá và điểm tổng hợp cuối cùng sẽ được tính.
Thực hiện theo các bước trong tài liệu này để hoàn thành Thử thách Chia quyết định.
Google Doc / .docx / .pdf
Khi bạn đã hoàn thành Thử thách Chia quyết định, hãy trao đổi với giáo viên của bạn. Đảm bảo bạn đã ghi lại kết quả của thử thách vào sổ ghi chép kỹ thuật của mình.
Tổng kết suy ngẫm
Bây giờ bạn đã tạo ra một chiến lược và cạnh tranh trong Thử thách Chia quyết định, đã đến lúc suy ngẫm về những gì bạn đã học và thực hiện trong Bài học này. Bắt đầu một trang mới trong sổ ghi chép kỹ thuật của bạn để bắt đầu suy ngẫm.
Tự đánh giá mình là người mới, người học việc hoặc chuyên gia về từng khái niệm sau trong sổ ghi chép kỹ thuật của bạn. Giải thích ngắn gọn về lý do tại sao bạn tự đánh giá cho mỗi khái niệm:
- Áp dụng kiến thức của tôi về điều khiển trình điều khiển tùy chỉnh trên bộ não IQ (thế hệ thứ 2) và trong VEXcode IQ để tôi có thể lái robot của mình đạt được điểm số cao nhất có thể trong Thử thách quyết định phân chia
- Lập kế hoạch và thực hiện một dự án để robot của tôi hoàn thành Thử thách Chia quyết định một cách tự động
- Phối hợp với các thành viên trong nhóm của tôi để tạo ra một chiến lược tổng thể cho Thử thách Chia quyết định
Sử dụng bảng này để giúp bạn xác định bạn thuộc danh mục nào.
| Chuyên gia | Tôi cảm thấy rằng tôi hoàn toàn hiểu được khái niệm này và có thể dạy điều này cho người khác. |
| Người học việc | Tôi cảm thấy rằng tôi hiểu khái niệm này đủ để cạnh tranh trong thử thách. |
| Người mới | Tôi cảm thấy rằng tôi không hiểu khái niệm và không biết làm thế nào để hoàn thành thử thách. |
Bước tiếp theo là gì?
Trong Bài học này, bạn đã tìm hiểu về tùy chỉnh điều khiển trình điều khiển. Bạn đã thực hành phát triển một chiến lược để hoàn thành các hoạt động bằng cách sử dụng điều khiển trình điều khiển và tự động. Bây giờ là lúc để cạnh tranh trong Cuộc thi Cube Collector!
Trong bài học tiếp theo, bạn sẽ:
- Xem qua các quy tắc của cuộc thi
- Phát triển chiến lược trò chơi
- Cạnh tranh trong cuộc thi Cube Collector!
Chọn < Quay lại Bài học để quay lại Tổng quan về Bài học.
Chọn Bài học Tiếp theo > để tiếp tục Bài học 5 và tìm hiểu cách tham gia Cuộc thi Thu thập Khối lập phương!