
練習する
前のセクションでは、ロボット Brain の Driver Control プログラムをカスタマイズする方法を学びました。 ここで、学んだことを適用して Clawbot を操作し、スタックとスコアの練習アクティビティを完了します。
このアクティビティでは、Brain のドライバー制御プログラムを使用しながら、ロボットを駆動して 1 つのキューブを拾って積み上げ、別のキューブを得点エリアに押し込みます。 ドライブ構成を反復して、ロボットを駆動してキューブをより簡単に拾い上げたり積み重ねたりできるようにします。
以下のビデオを見て、学んだことを応用してスタックとスコアの練習アクティビティを完了する方法を確認してください。
次は、あなたがスタックとスコアの練習アクティビティを完了する番です。
このアニメーションは、ロボットが 1 つのキューブを積み上げて別のキューブを獲得して、 スタックとスコアの練習アクティビティを完了するために移動できる 1 つの考えられる方法を示しています。
この文書を参考として使用して、練習アクティビティを完了してください。 Google ドキュメント / .docx / .pdf
スタックとスコアの練習アクティビティを完了したら、ドライバー コントロールの変更とエンジニアリング ノートを文書化します。
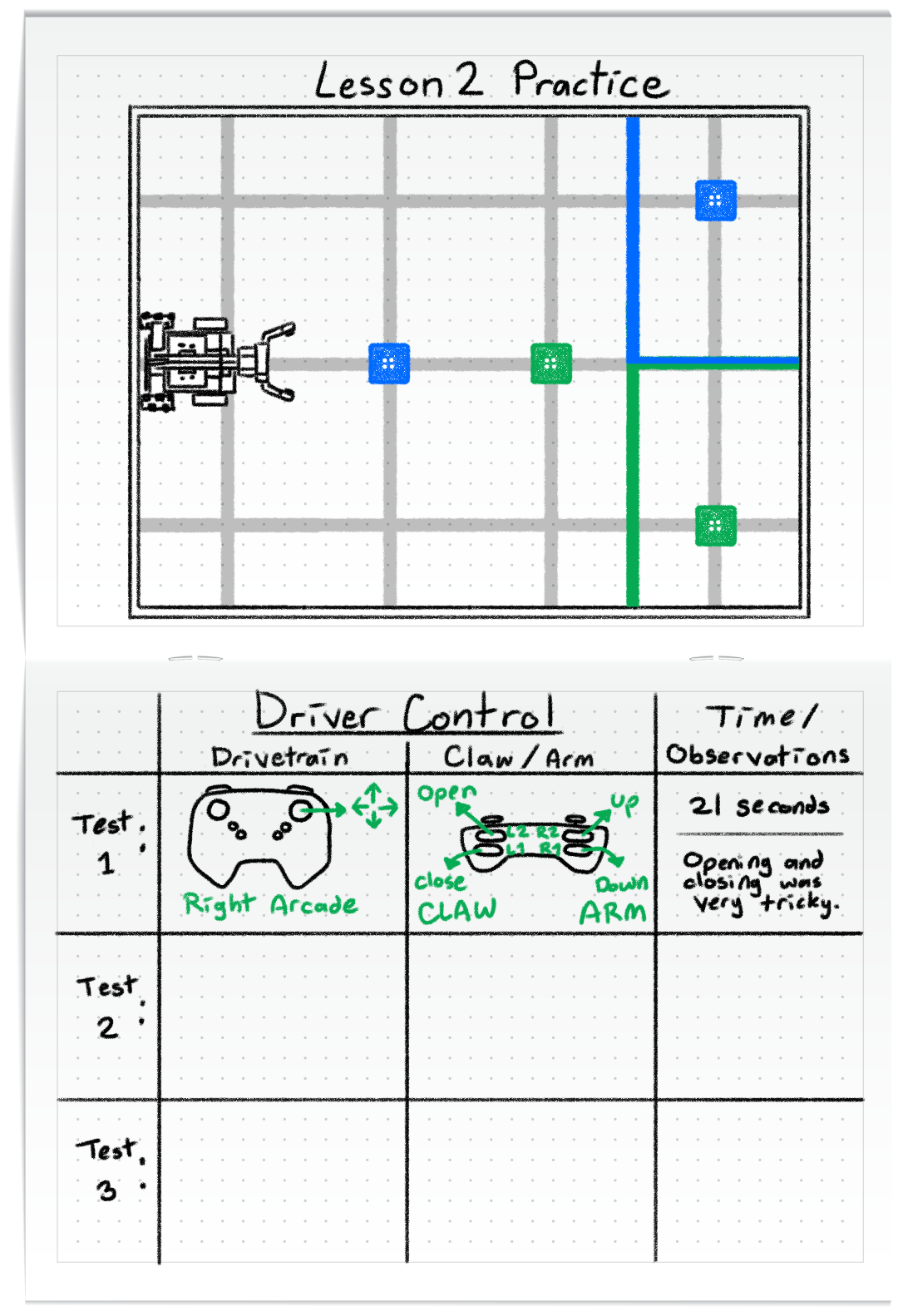
- アームとクローの駆動と制御にはどのようなコントローラー構成を使用しましたか?
- それぞれの構成でアームと爪を操作して立方体を拾い上げたり配置したりすることがどれだけうまくできましたか?
- テストを実行するたびに、ロボットがキューブを得点エリアに移動するのにどれくらい時間がかかりましたか?
設計のアイデアとテストを記録する方法の例については、左側の画像を参照してください。
チャレンジの準備をする
「競争」 (次のページ) では、ロボットを運転してキューブを 1 つ積み上げ、スピード スタック チャレンジで別のキューブを得点します。 一番速いタイムが勝ちです! チャレンジで競争する方法を学び、理解を確認してから、チャレンジに向けて練習します。
このチャレンジの目標は、得点エリアにあるキューブを 1 つ積み上げて、両方を最速の時間で得点することです。
このアニメーションを見て、Clawbot が両方のキューブを正常にスコアリングする例を確認してください。
このチャレンジを完了する方法の詳細については、このドキュメントの手順に従ってください。 Google ドキュメント / .docx / .pdf
理解を確認してください
チャレンジを開始する前に、エンジニアリング ノートブック内の以下の文書の質問に答えて、チャレンジのルールと設定を理解していることを確認してください。
理解度を確認するための質問 Google ドキュメント / .docx / .pdf
問題を完了したら、課題を練習してみてください。
Speed Stack Challenge に参加するには、 Next > を選択します。