
實踐
在上一節中,您學習如何在機器人 Brain 上自訂驅動程式控製程式。 現在,您將運用所學來驅動 Clawbot 完成堆疊和得分練習活動。
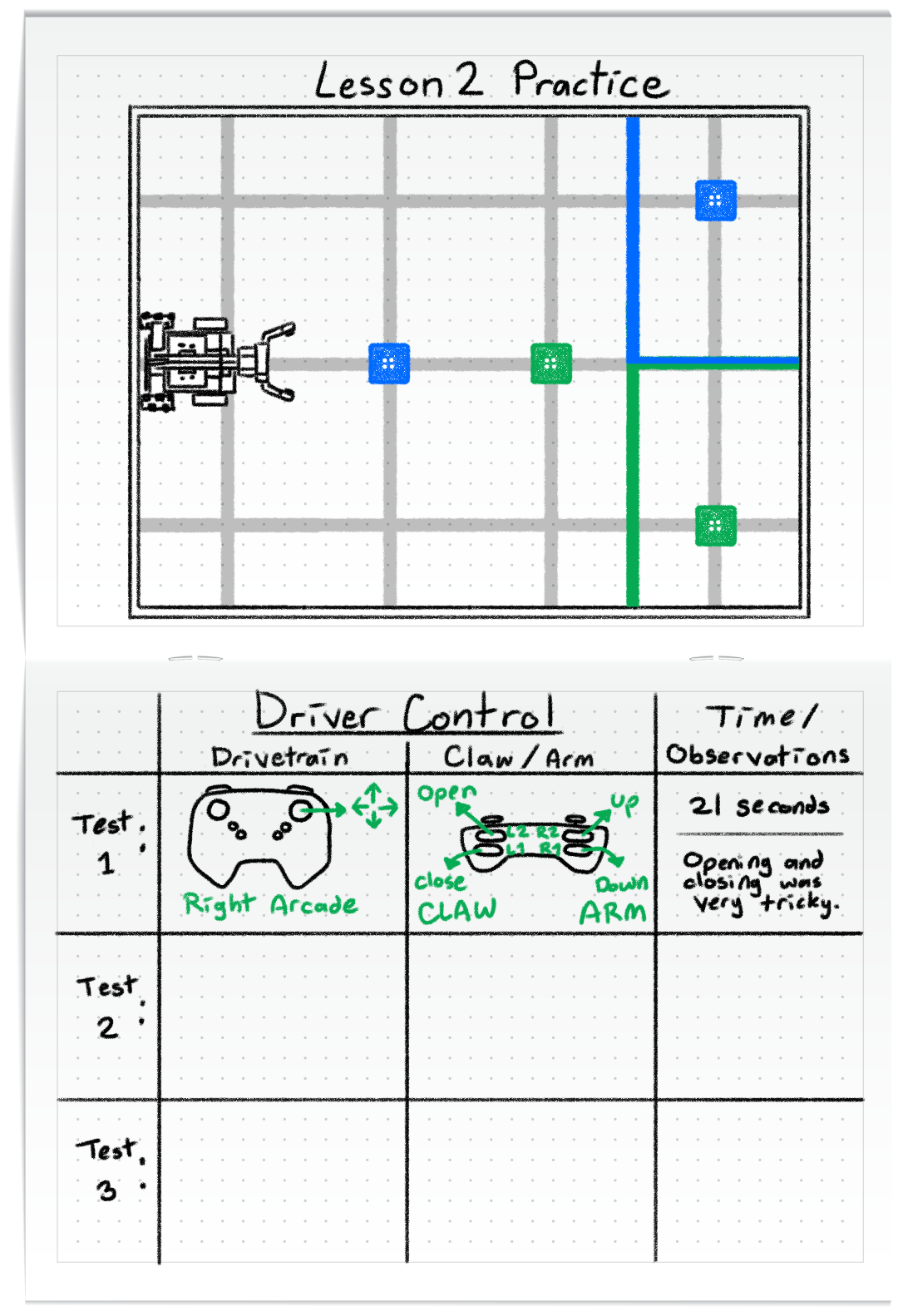
在此活動中,您將駕駛機器人拾取並堆疊一個立方體,然後將另一個立方體推入得分區域,同時使用大腦上的駕駛員控製程式。 您將迭代您的驅動配置,以便您可以驅動機器人更輕鬆地拾取和堆疊立方體。
觀看下面的視頻,了解如何運用所學知識來完成堆疊和得分練習活動。
現在輪到你完成籌碼和得分練習活動了!
準備迎接挑戰
在「競爭」(下一頁)中,您將駕駛機器人堆疊一個立方體,並在「速度堆疊挑戰」中得分另一個立方體。 用時最快者獲勝! 了解如何參加挑戰,檢視您的理解情況,然後練習應對挑戰。