
Praktik
Di bagian terakhir, Anda mempelajari cara menyesuaikan program Kontrol Pengemudi pada robot Brain. Sekarang Anda akan menerapkan apa yang telah Anda pelajari untuk mengendalikan Clawbot Anda guna menyelesaikan aktivitas latihan Tumpuk dan Skor.
Dalam aktivitas ini, Anda akan mengendalikan robot untuk mengambil dan menumpuk satu kubus lalu mendorong kubus lain ke area penilaian, semuanya sambil menggunakan program Kontrol Pengemudi di Brain. Anda akan mengulangi konfigurasi drive Anda, sehingga Anda dapat menggerakkan robot untuk mengambil dan menumpuk kubus dengan lebih mudah.
Tonton video di bawah ini untuk melihat bagaimana Anda dapat menerapkan apa yang telah Anda pelajari untuk menyelesaikan aktivitas latihan Tumpuk dan Skor.
Sekarang giliran Anda untuk menyelesaikan aktivitas latihan Tumpuk dan Nilai!
Tonton animasi di bawah untuk melihat contoh Clawbot yang berhasil mencetak kedua kubus. Dalam video, Clawbot mulai di tengah dinding kanan Cube Collector Field, menghadap ke tengah tempat kubus hijau dan biru diletakkan pada garis persimpangan Field di depannya. Robot melaju ke depan, mendorong kubus hijau ke area penilaian hijau. Ia mengambil kubus biru dengan cakarnya, dan menumpuknya pada kubus biru di zona penilaian biru.
Animasi ini menunjukkan satu kemungkinan cara robot Anda bergerak untuk menyelesaikan aktivitas latihan Tumpuk dan Nilai.
Gunakan dokumen ini sebagai referensi untuk menyelesaikan aktivitas latihan. Google / .docx / .pdf
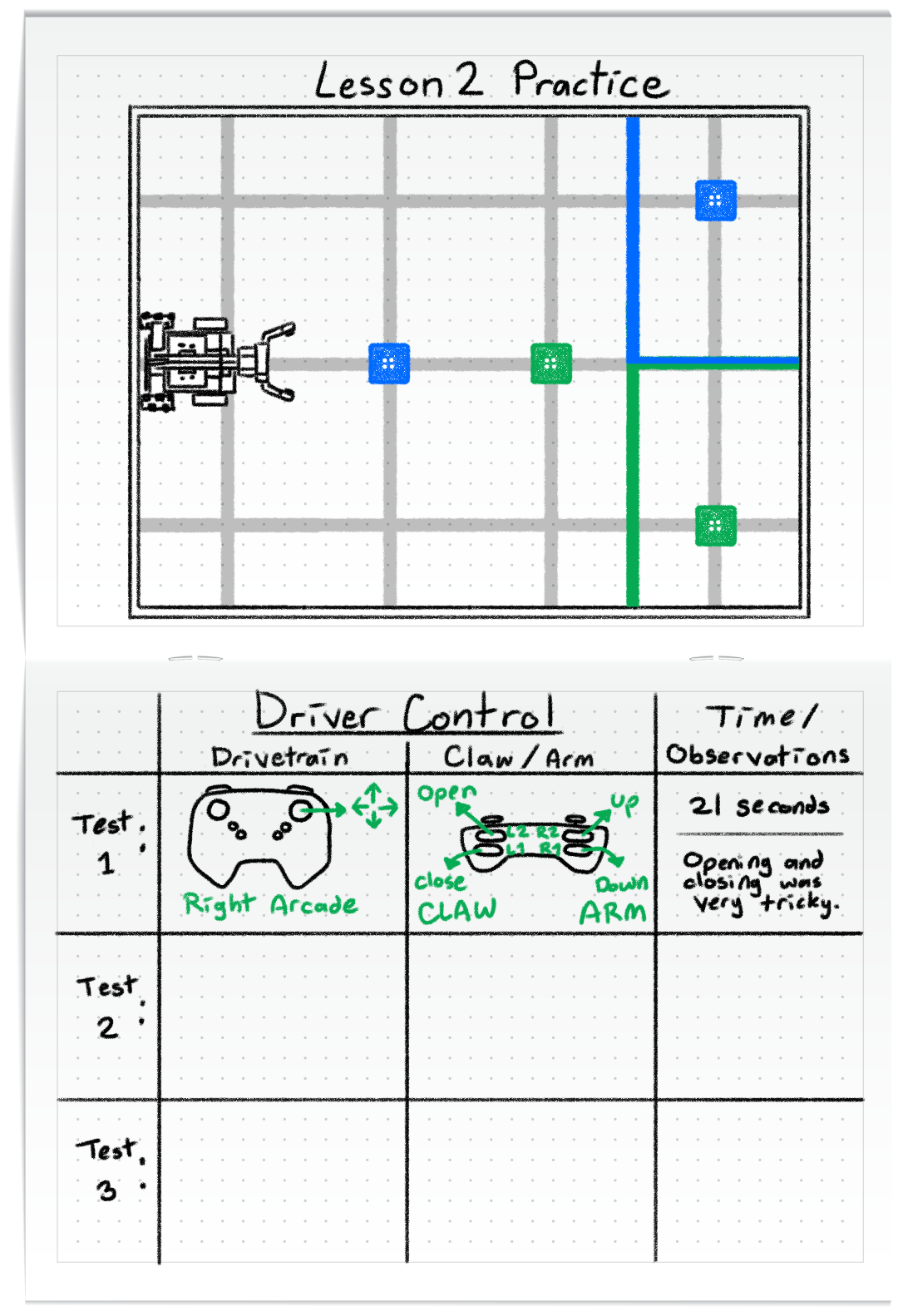
Saat Anda menyelesaikan aktivitas latihan Tumpuk dan Skor, dokumentasikan modifikasi kontrol pengemudi dan buku catatan teknik Anda.
- Konfigurasi pengontrol apa yang Anda gunakan untuk menggerakkan dan mengendalikan lengan dan cakar?
- Seberapa baik Anda memanipulasi lengan dan cakar untuk mengambil dan meletakkan kubus dengan setiap konfigurasi?
- Berapa lama waktu yang dibutuhkan robot untuk memindahkan kubus ke area penilaian pada setiap uji coba?
Lihat gambar di sebelah kiri untuk contoh bagaimana Anda dapat merekam ide desain dan pengujian Anda.
Bersiap untuk Tantangan
Dalam Compete (di halaman berikutnya), Anda akan mengendalikan robot Anda untuk menumpuk satu kubus dan mencetak skor pada kubus lainnya dalam Speed Stack Challenge. Waktu tercepat, menang! Pelajari cara berkompetisi dalam tantangan tersebut, periksa pemahaman Anda, lalu berlatihlah untuk tantangan tersebut.
Tonton animasi di bawah untuk melihat contoh Clawbot yang berhasil mencetak kedua kubus. Stopwatch ada di bagian atas video, bersama dengan ikon Pengontrol. Clawbot dimulai di tengah dinding kanan Cube Collector Field, menghadap ke tengah tempat kubus hijau dan biru diletakkan pada garis persimpangan Field di depannya.
Setelah hitungan mundur, stopwatch mulai menyala dan Clawbot melaju maju, mendorong kubus hijau ke area penilaian hijau. Ia mengambil kubus biru dengan cakarnya, dan menumpuknya pada kubus biru di zona penilaian biru.
Periksa Pemahaman Anda
Sebelum memulai tantangan, pastikan Anda memahami aturan dan pengaturan tantangan dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda Google Doc / .docx / .pdf
Setelah menyelesaikan pertanyaan, cobalah berlatih tantangannya.
Pilih Berikutnya > untuk bersaing dalam Tantangan Tumpukan Kecepatan.