
实践
在上一节中,您学习了如何在机器人 Brain 上自定义驱动程序控制程序。 现在,您将运用所学知识来驱动 Clawbot 完成堆栈和得分练习活动。
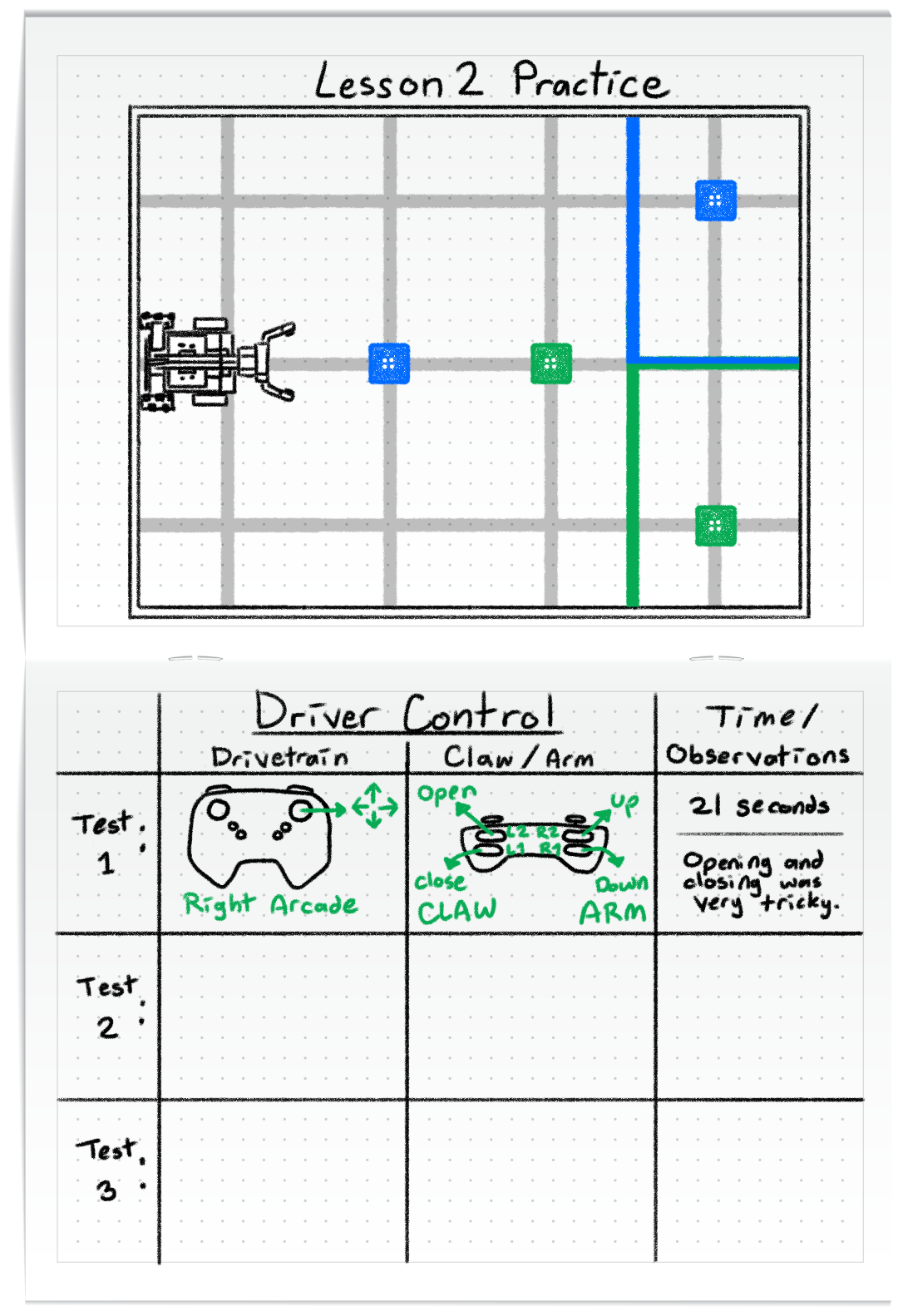
在本活动中,您将驾驶机器人拾取并堆叠一个立方体,然后将另一个立方体推入得分区域,同时使用大脑上的驾驶员控制程序。 您将迭代您的驱动配置,以便您可以驱动机器人更轻松地拾取和堆叠立方体。
观看下面的视频,了解如何运用所学知识来完成堆栈和得分练习活动。
现在轮到你完成筹码和得分练习活动了!
准备迎接挑战
在“竞争”(下一页)中,您将驾驶机器人堆叠一个立方体,并在“速度堆叠挑战”中得分另一个立方体。 用时最快者获胜! 了解如何参加挑战,检查您的理解情况,然后练习应对挑战。