
練習する
前のセクションでは、アクティブ マニピュレータとパッシブ マニピュレータについて、またオブジェクトを操作するためにそれらを設計する方法について学びました。 次に、マニピュレーターの練習アクティビティで立方体を効率的に移動するために学んだ内容を適用します。
このアクティビティでは、フィールドの中心からフィールドの端にあるゴールまでキューブを移動する練習をします。 現在の爪マニピュレータのデザインを反復するか、新しい爪 を作成して、ゴールを通過する立方体を移動する能力を最大限に高めます。
以下のビデオを見て、マニピュレーターの練習アクティビティを完了するために学んだことをどのように適用できるかを確認してください。
次は、マニピュレーターの練習アクティビティを完了する番です。
このアニメーションでは、コントローラーを使用してロボットを駆動し、フィールドの中心からフィールドの反対側のゴールまでキューブを移動させます。 このアニメーションは、立方体を移動する可能な方法の 1 つを示しています。 マニピュレータの練習アクティビティを完了すると、マニピュレータ ビルド を反復して改善します。
この文書を参考として使用して、練習アクティビティを完了してください。Google ドキュメント / .docx / .pdf
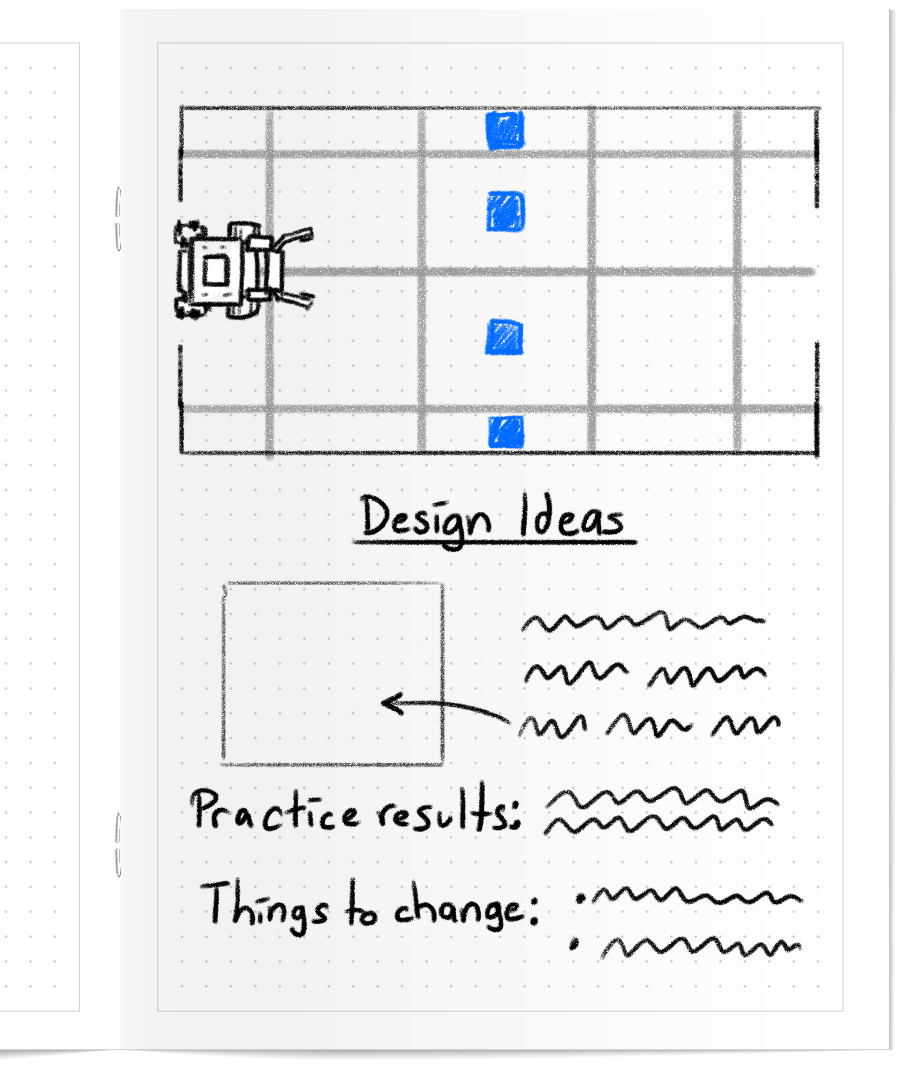
演習アクティビティを完了したら、設計とテストをエンジニアリング ノートに文書化します。
- ロボットが最初にキューブをゴールまでどの程度うまく移動させるかについての観察。
- マニピュレーターのオリジナルデザイン。
- 練習アクティビティでのロボットのパフォーマンスを向上させるために、この設計をどのように繰り返しましたか?
設計のアイデアとテストを記録する方法の例については、左側の画像を参照してください。
チャレンジの準備をする
「競争」(次のページ) では、1 対 1 のロボット サッカーで競争するときにマニピュレーターの設計をテストします。 チャレンジで競争する方法を学び、理解を確認してから、チャレンジに向けて練習します。
このチャレンジの目標は、 コントローラーを使用してロボットを駆動し、60 秒以内に 多くのゴールを獲得することです。
このアニメーションを見て、1 対 1 のロボット サッカー チャレンジに参加する方法を確認してください。
このチャレンジを完了する方法の詳細については、このドキュメントの手順に従ってください。Google ドキュメント / .docx / .pdf
理解を確認してください
チャレンジを開始する前に、エンジニアリング ノートブックにある以下の文書の質問に答えて、ルールを理解し、設定していることを確認してください。
理解度を確認する質問Google ドキュメント / .docx / .pdf
問題を完了したら、チャレンジに向けて練習します。
次へ > を選択して、1 対 1 のロボット サッカー チャレンジに参加します。