
实践
在上一节中,您了解了主动和被动操纵器以及如何设计它们来操纵对象。 现在您将应用您所学到的知识来帮助您在操纵器练习活动中有效地移动立方体!
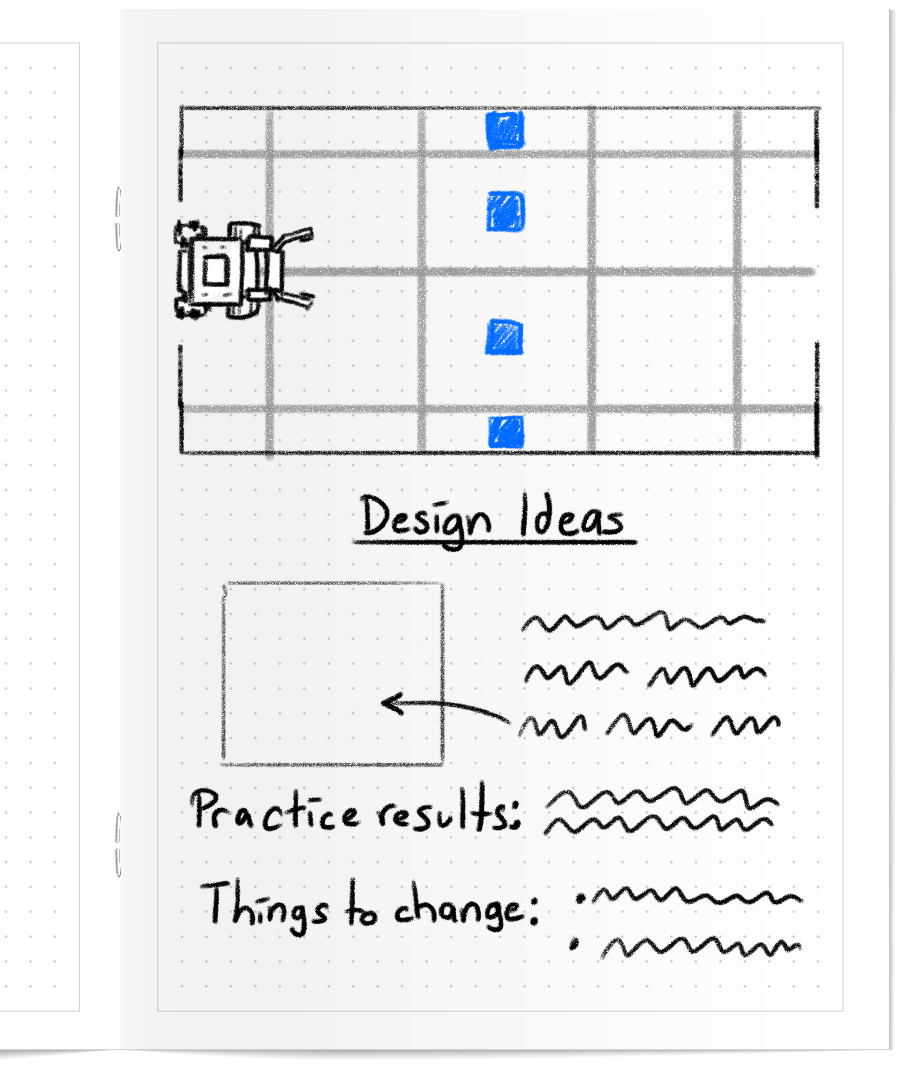
在本活动中,您将练习将立方体从场地中心移动到场地末端的球门。 您将迭代当前的爪式操纵器设计,或创建一个新的 以最大限度地提高您移动立方体穿过目标的能力。
观看下面的视频,了解如何应用所学知识来完成操纵器练习活动。
现在轮到你完成机械手练习活动了!
准备迎接挑战
在“竞争”(下一页)中,您将在参加一对一机器人足球比赛时测试您的机械手设计。 了解如何参加挑战,检查您的理解情况,然后练习应对挑战。
选择下一步 > 参加一对一机器人足球挑战赛。