
ปรับปรุงโครงการของคุณ
![]() กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
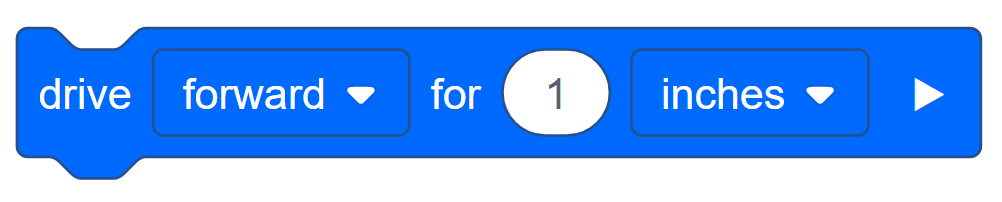
ส่วน Rethink นี้จะช่วยให้นักเรียนสามารถมีส่วนร่วมในกิจกรรมเพิ่มเติมโดยใช้บล็อก [drive for]
ส่วนนี้ประกอบด้วย:
- กิจกรรมรีมิกซ์:
- กิจกรรม A: ขยับออกไป 10 นิ้ว!
- กิจกรรม B: สนุกมากขึ้นด้วย [ขับเคลื่อนเพื่อ] Block!
- คำถามรีมิกซ์
![]() กล่องเครื่องมือสำหรับครู
-
การทบทวนบทบาทของนักเรียน
กล่องเครื่องมือสำหรับครู
-
การทบทวนบทบาทของนักเรียน
นักศึกษาจะทำงานร่วมกับกลุ่มของตนเพื่อพัฒนาโปรแกรมต่อไปและบันทึกความคิดและไอเดียของพวกเขาลงในสมุดบันทึกวิศวกรรมของตน ในตอนต้นของส่วนการคิดใหม่ ให้แบ่งนักเรียนออกเป็นกลุ่มและให้นักเรียนเลือกบทบาทของตนเอง คลิก ที่นี่ ( Google Doc / .docx / .pdf ) สำหรับบทบาทที่แนะนำ
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
หากนักเรียนต้องการเคลื่อนที่ไประยะทางที่กำหนด ก็สามารถใช้บล็อก [drive for] ได้
หากต้องการข้อมูลเพิ่มเติมเกี่ยวกับบล็อค คลิกที่นี่ (Google Doc / .docx /.pdf)
-
ถ้าหากนักเรียนต้องการทบทวน VEXcode IQ อย่างรวดเร็ว พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสอบสวนนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ นักเรียนสามารถทบทวนการบันทึก การดาวน์โหลด และการรันโปรแกรม รวมถึงรายการอื่นๆ ได้จากแบบฝึกสอน

- ตรวจสอบให้แน่ใจว่ากลุ่มนักเรียนแต่ละกลุ่มมีวัสดุที่จำเป็นทั้งหมด
การสำรวจอีกบล็อคหนึ่ง
| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
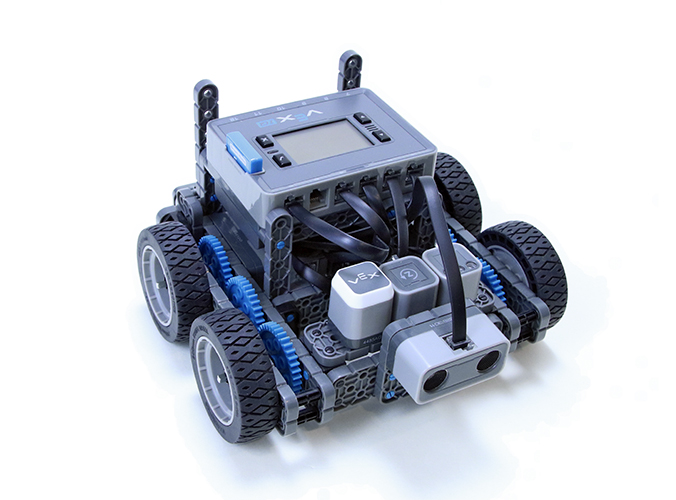
หุ่นยนต์ออโตไพลอต |
| 1 |
แบตเตอรี่หุ่นยนต์ชาร์จแล้ว |
| 1 |
วีเอ็กซ์โค้ด ไอคิว |
| 1 |
สมุดบันทึกวิศวกรรม |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
แบบจำลองตรวจสอบว่าระบบ Autopilot พร้อมใช้งานแล้ว
-
เตือนนักเรียนว่าแต่ละกลุ่มจะมีใครบางคนทำหน้าที่ผู้สร้าง และคนนั้นควรตรวจสอบรายการเหล่านี้ตลอดการสำรวจ
-
คลิกที่นี่ (Google Doc / .docx / .pdf) สำหรับการกำหนดค่ามอเตอร์และเซ็นเซอร์ของ Autopilot