
الدرس 3: الحركة المستقلة على طول المحور X
في الدرس السابق، تعلمت عن أساسيات علوم الكمبيوتر بما في ذلك ما هي لغة البرمجة، وما هو سلوك الروبوت، وكيفية تعديل سلوك الروبوت. ثم قمت بتطبيق هذه المهارات من خلال تحديد سلوكيات الذراع الروبوتية المكونة من 6 محاور.
في هذا الدرس، سوف تتعلم كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور x.
في نهاية هذا الدرس، سوف تقوم ببرمجة الذراع المكون من 6 محاور للتحرك على طول المحور x للعثور على الحد الأدنى والحد الأقصى لقيمة x التي يمكن للذراع المكون من 6 محاور التحرك إليها.
ترميز الذراع المكون من 6 محاور على طول المحور X
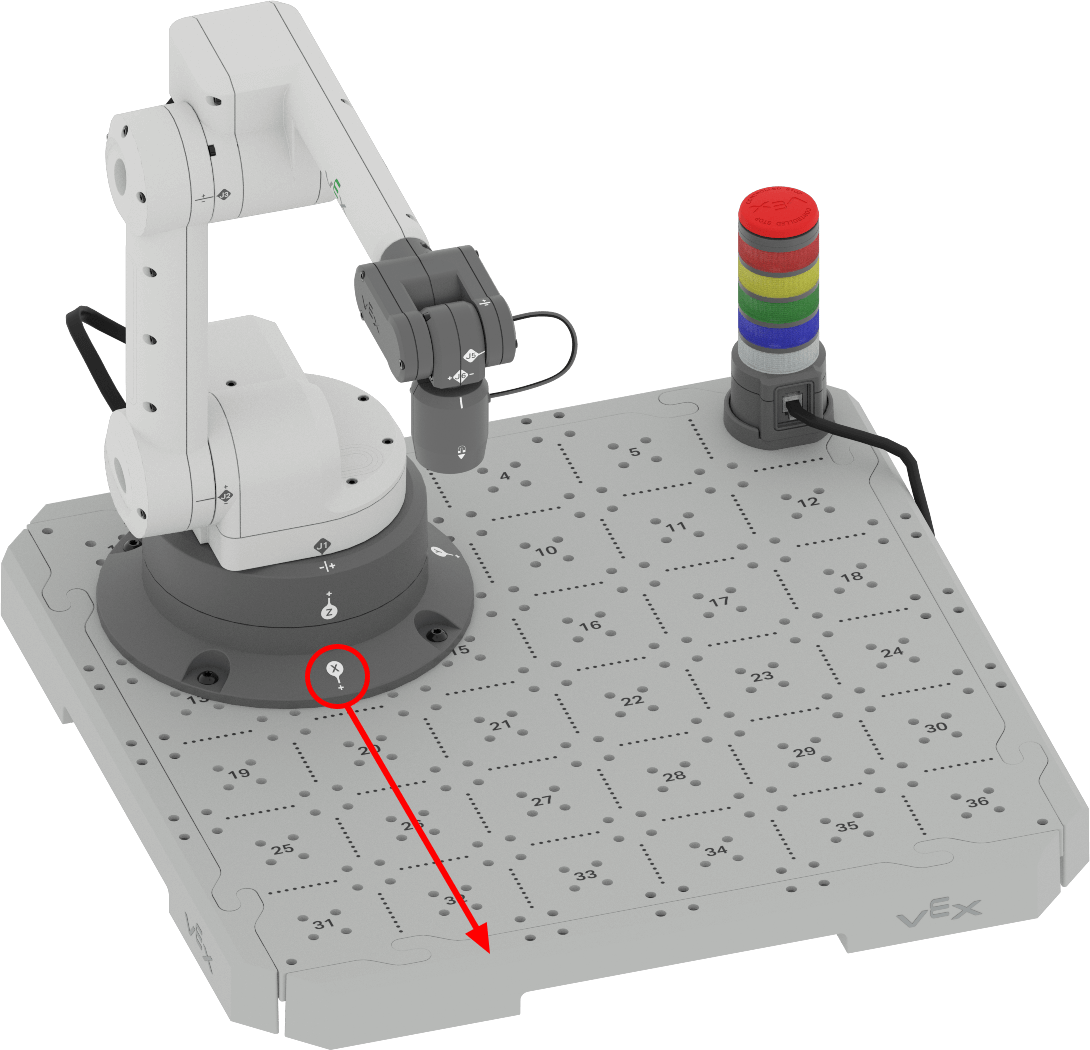
بإمكانك استخدام المعلومات المتعلقة بالإحداثيات وكيفية تحرك الذراع المكون من 6 محاور في الفضاء ثلاثي الأبعاد لترميز الذراع المكون من 6 محاور للتحرك بشكل مستقل على طول المحور x. اتبع الخطوات أدناه لترميز الذراع المكون من 6 محاور للتحرك على طول المحور x.
في VEXcode، افتح مشروع كتلة جديدة.
اتبع الخطوات الموجودة في الفيديو لفتح مشروع جديد.
حدد الخيار ملف في شريط الأدوات لفتح قائمة الملف، ثم حدد مشروع كتل جديدة. تظهر نافذة منبثقة تحتوي على خيار EXP Brain أو 6-Axis Arm. حدد 6 محاور. ثم يتم فتح المشروع الجديد.
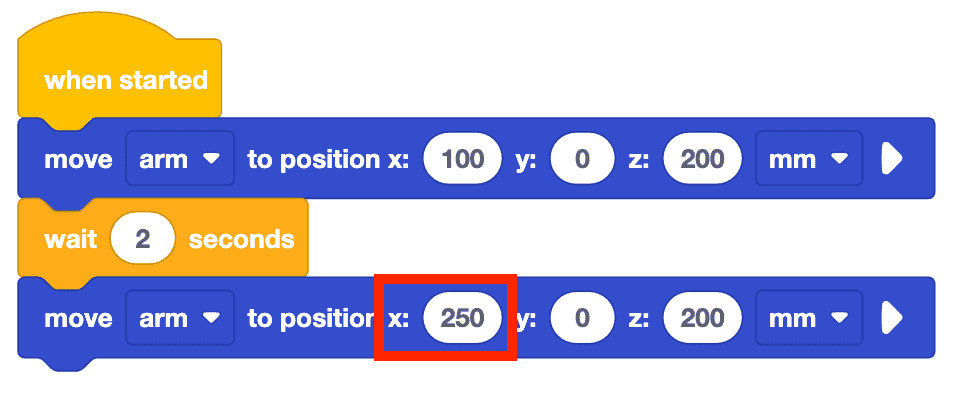
أعد إنشاء المشروع الموضح هنا عن طريق سحب الكتل إلى مساحة العمل وإرفاقها كما هو موضح.
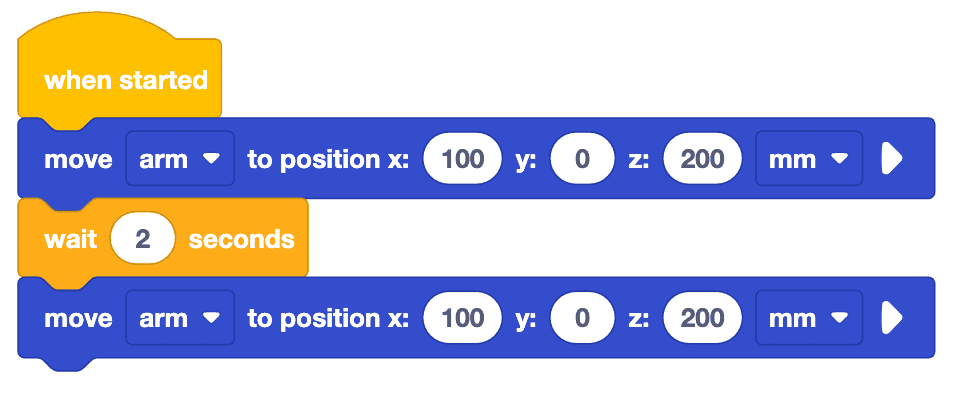
يستخدم هذا المشروع كتلة التحرك إلى الموضع لتحريك نهاية الذراع المكون من 6 محاور في الفضاء. تحتوي هذه الكتلة على مساحات لقيم إحداثيات x وy وz المراد إدخالها. سيتم استخدام هذه الكتلة طوال هذا الدرس لتحريك ذراع المحاور الستة إلى إحداثيات جديدة.
لاحظ أن هذه الكتلة تتضمن قيم الإحداثيات الكاملة (100، 0، 200). تذكّر أن الذراع المكون من 6 محاور يتطلب قيمة لكل محور حتى يتمكن من التحرك إلى الموقع المطلوب.
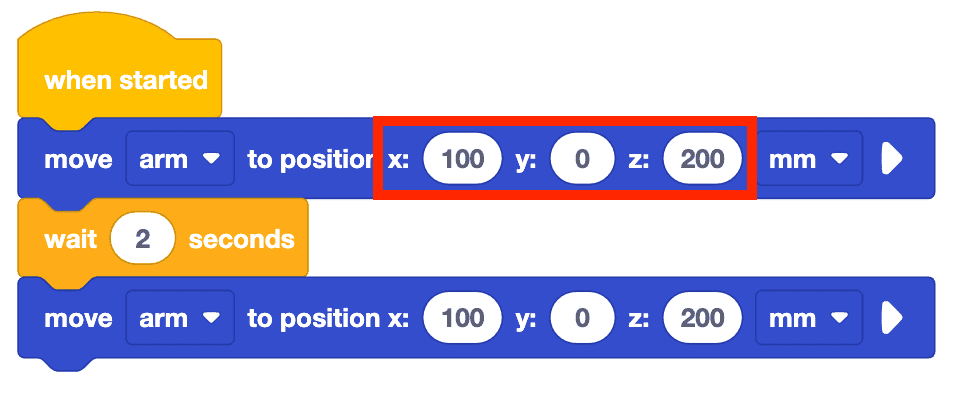
قم بتغيير قيمة x في الثانية انتقل إلى الموضع كتلة من 100 مم إلى 250 مم.
ما هو برأيك السبب الذي سيؤدي إلى قيام الذراع المكون من 6 محاور بفعله؟ سجل توقعاتك في دفتر الهندسة الخاص بك.
ملاحظة : لا يتمقيم y وz هنا لأن الهدف هو تغيير ومراقبة محور واحد في كل مرة. إن الحفاظ على قيم y وz كما هي ولكن تغيير قيم x يسمح لنا برؤية كيفية تحرك الذراع المكون من 6 محاور على طول المحور x.
قم بإعادة تسمية المشروع وحفظه على جهازك.
تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode. تشغيل المشروع.
راقب الذراع المكون من 6 محاور أثناء تحركه على طول المحور السيني. لاحظ أن الذراع المكون من 6 محاور سيبدأ بالتحرك إلى الوضع الآمن (120، 0، 100)، ثم سينفذ المشروع.
أوقف المشروع بمجرد توقف الذراع المكون من 6 محاور عن الحركة.
سجل ملاحظاتك في دفتر الهندسة الخاص بك. كيف تحرك الذراع ذو الستة محاور في هذا المشروع؟ هل هو مماثل أو مختلف عن توقعاتك؟ لماذا؟
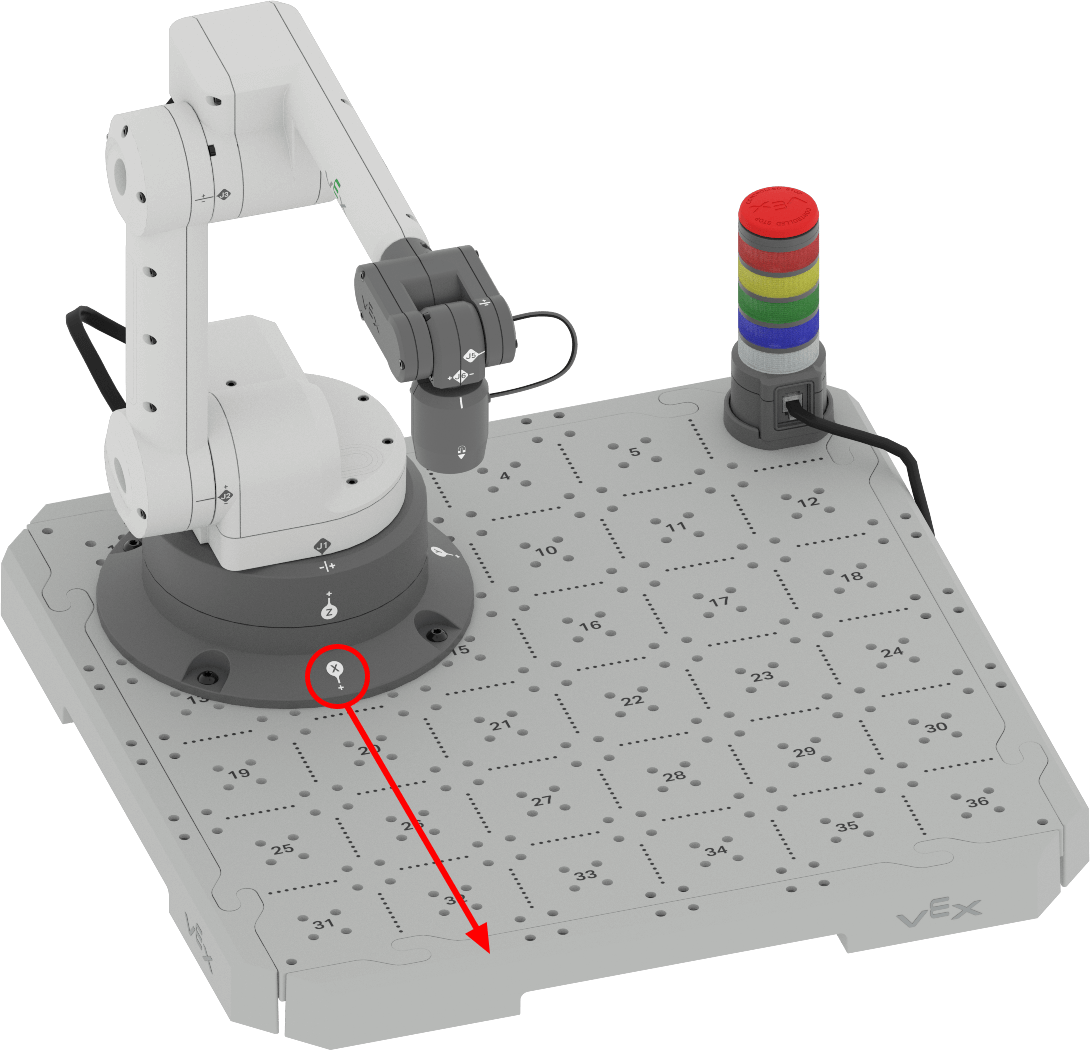
لاحظ أنه عندما يتم تغيير قيمة x، ينسحب الذراع المكون من 6 محاور ويمتد على طول المحور x. في هذا الرسوم المتحركة، حيث يمتد الذراع المكون من 6 محاور للأمام بعيدًا عن القاعدة، وللخلف باتجاهها، على طول المحور السيني.
التقدم في المشروع
الآن بعد أن قمت بتشغيل المشروع باستخدام زر "RUN"، يمكنك أيضًا تنفيذ المشروع باستخدام زر "STEP". تقوم ميزة الخطوة بتنفيذ المشروع كتلة واحدة في كل مرة. يمكن أن يسمح لك هذا برؤية واضحة لكيفية تطابق كل كتلة في المشروع مع سلوك الروبوت. اتبع الخطوات أدناه لتتمكن من تنفيذ المشروع.
اضغط على زر الخطوة.
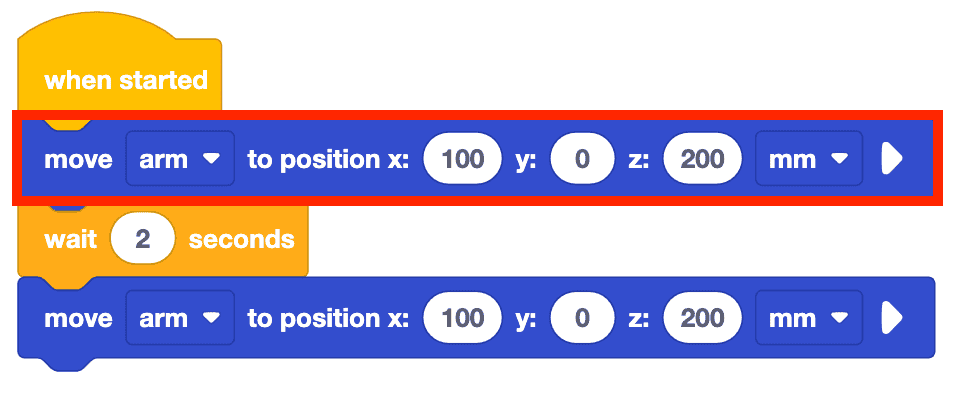
سيتحرك الذراع ذو الستة محاور إلى الوضع الآمن، ثم سيتم تمييز الكتلة الأولى في المكدس المتصلة بالكتلة عند البدء. في هذا المشروع، سيتم تمييز كتلة نقل إلى الموضع، ولكن لن يتم تنفيذها إلا عند الضغط على زر الخطوة مرة ثانية كما هو موضح في هذا الفيديو.
اضغط على زر الخطوة مرة ثانية لتشغيل كتلة الانتقال إلى الموضع.
بمجرد تشغيل الكتلة، سيتم نقل التمييز إلى الكتلة التالية في المكدس، كتلة Wait ، كما هو موضح في هذا الفيديو.
12. تتبع عملية تنفيذ المشروع خطوات - أولاً يتم تسليط الضوء على كتلة، ثم يتم تنفيذها. واصل اختيار زر لتنفيذ الكتل المتبقية في المشروع واحدة تلو الأخرى، كما هو موضح في الفيديو أدناه. يمكن أن يكون هذا مفيدًا جدًا عند محاولة استكشاف أخطاء مشروع ما وإصلاحها، حيث يمكنك عرض سلوكيات الروبوت الفردية بشكل أكثر وضوحًا. شاهد الفيديو أدناه لرؤية بقية المشروع الذي تم تنفيذه باستخدام ميزة الخطوة.
نشاط
الآن بعد أن تعلمت كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور السيني، سوف تمارس هذه المهارات. في هذا النشاط، سوف تقوم ببرمجة الذراع المكون من 6 محاور للتحرك على طول المحور x للعثور على الحد الأدنى والحد الأقصى لقيم x التي يمكن للذراع المكون من 6 محاور التحرك إليها.
- قم بإجراء تنبؤ بشأن الحد الأدنى والحد الأقصى لقيم x التي يمكن أن يتحرك إليها الذراع المكون من 6 محاور. قم بتسجيل القيم المتوقعة في دفتر الهندسة الخاص بك.
- باستخدام نفس المشروع أعلاه، قم قيم x في الكتلتين إلى قيمك المتوقعة.
- قم بتشغيل مشروعك لاختبار توقعاتك. تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode.
- استمر في التنبؤ واختبار قيم x المختلفة. تأكد من تسجيل توقعاتك ونتائجك في دفتر الهندسة الخاص بك عند اختبار مشاريعك. ما هي القيم الدنيا والقصوى التي تجدها ؟
- قارن نتائجك مع القيم للمجموعات الأخرى. هل هما متشابهان أم مختلفان؟ ما هي المجموعة التي لها أكبر وأصغر قيمة؟ اختبر هذه القيم وقم بتعديل نتائجك إذا لزم الأمر.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم الموجودة في هذا الدرس من خلال الإجابة على الأسئلة الموجودة في المستند في دفتر الهندسة الخاص بك.
أسئلة التحقق من فهمك > (Google Doc / .docx / .pdf)
حدد التالي > لإكمال انعكاس الوحدة الوسطى.