
Pelajaran 3: Gerakan Otonom Sepanjang Sumbu X
Dalam Pelajaran sebelumnya, Anda mempelajari dasar-dasar ilmu komputer termasuk apa itu bahasa pemrograman, apa itu perilaku robot, dan cara memodifikasi perilaku robot. Anda kemudian menerapkan keterampilan ini dengan mengidentifikasi perilaku Lengan Robot 6-Sumbu.
Dalam Pelajaran ini, Anda akan mempelajari cara membuat kode Lengan 6-Sumbu untuk bergerak sepanjang sumbu x.
Di akhir Pelajaran ini, Anda akan mengodekan Lengan 6-Sumbu untuk bergerak sepanjang sumbu x untuk menemukan nilai x minimum dan maksimum yang dapat dicapai Lengan 6-Sumbu.
Mengkodekan Lengan 6-Sumbu Sepanjang Sumbu X
Anda dapat menggunakan informasi tentang koordinat dan cara Lengan 6-Sumbu bergerak dalam ruang 3D untuk mengkodekan Lengan 6-Sumbu agar bergerak secara otonom sepanjang sumbu x. Ikuti langkah-langkah di bawah ini untuk mengkode Lengan 6-Sumbu agar bergerak sepanjang sumbu x.
Di VEXcode, buka Proyek Blok Baru
Ikuti langkah-langkah dalam video untuk membuka proyek baru.
Pilih opsiFiledi Toolbar untuk membuka menu File, lalu pilihProyek Blok Baru.Jendela pop-up akan muncul dengan opsi untuk EXP Brain atau 6-Axis Arm. PilihLengan 6-Sumbu. Proyek baru kemudian dibuka.
Buat ulang proyek yang ditunjukkan di sini dengan menyeret blok ke Ruang Kerja dan menempelkannya seperti yang ditunjukkan.

Proyek ini menggunakan blok Pindahkan ke posisi untuk menggerakkan ujung Lengan 6-Sumbu di ruang angkasa. Blok ini memiliki ruang untuk memasukkan nilai koordinat x, y, dan z. Blok ini akan digunakan sepanjang Pelajaran ini untuk memindahkan Lengan 6-Sumbu ke koordinat baru.

Perhatikan bahwa blok ini menyertakan nilai koordinat penuh (100, 0, 200). Ingat bahwa Lengan 6-Sumbu memerlukan nilai untuk setiap sumbu agar dapat bergerak ke lokasi yang diinginkan.

Ubah nilai x pada blok kedua Pindahkan ke posisi blok dari 100mm ke 250mm.
Menurut Anda apa yang akan terjadi pada Lengan 6-Sumbu? Catat prediksi Anda di buku catatan teknik Anda.
Catatan: Nilai y dan z tidak diubah di sini karena tujuannya adalah untuk mengubah dan mengamati satu sumbu pada satu waktu. Dengan menjaga nilai y dan z tetap sama tetapi mengubah nilai x, kita dapat melihat bagaimana Lengan 6-Sumbu akan bergerak sepanjang sumbu x.

Ganti nama proyek dan simpan ke perangkat Anda.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyeknya.
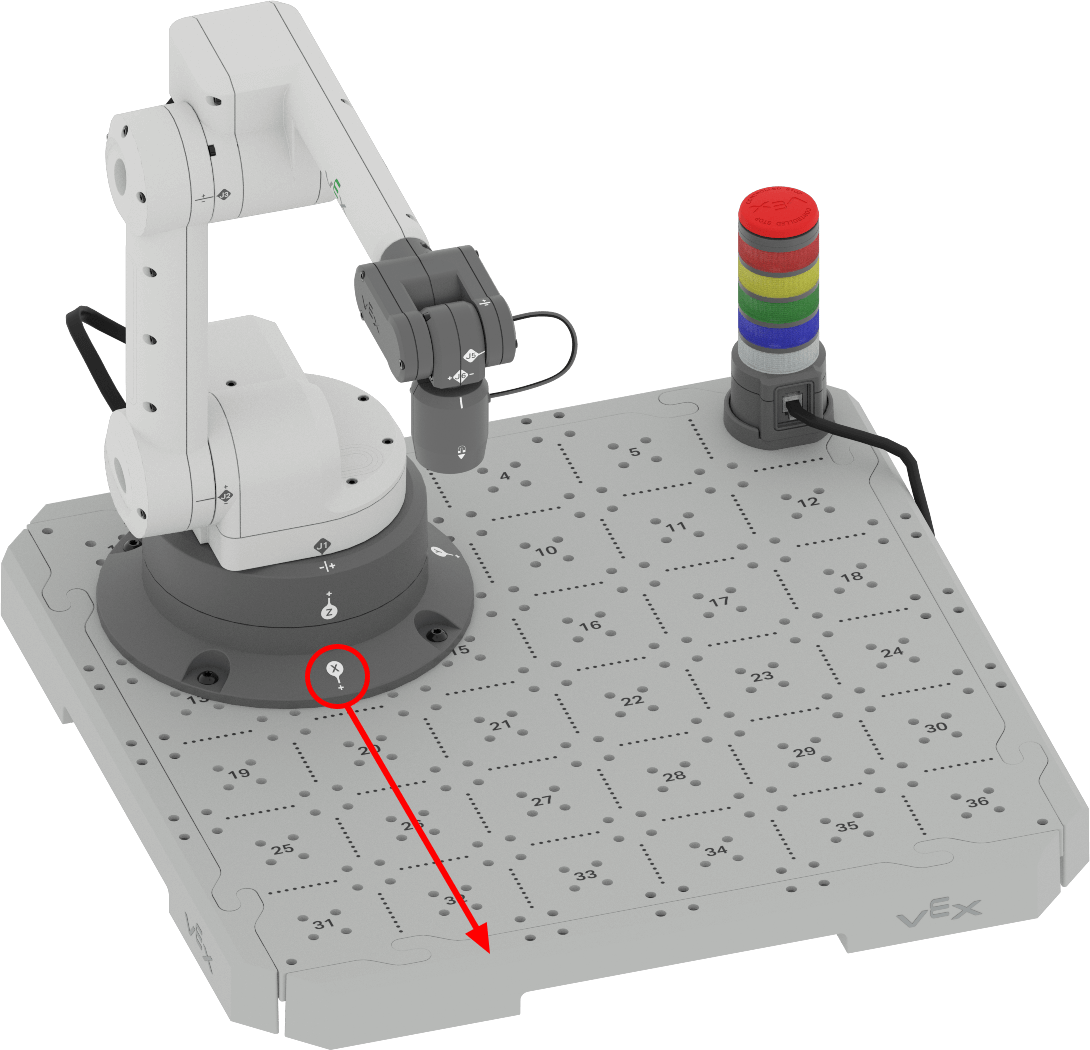
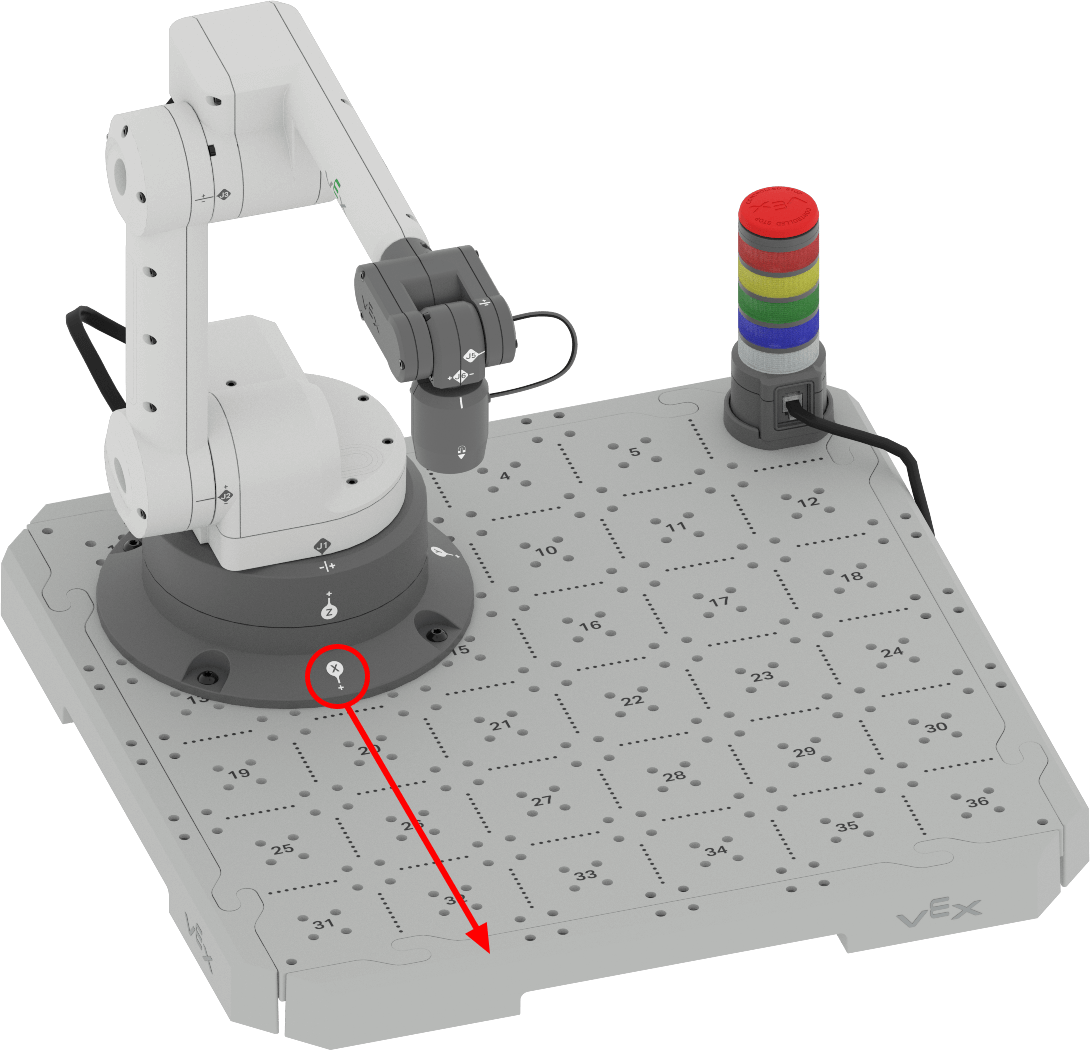
Amati Lengan 6-Sumbu saat bergerak sepanjang sumbu x. Perhatikan bahwa Lengan 6-Sumbu akan mulai bergerak ke Posisi Aman (120, 0, 100), lalu akan mengeksekusi proyek.

Hentikan proyek setelah Lengan 6-Sumbu berhenti bergerak.
Catatlah pengamatan Anda di buku catatan teknik Anda. Bagaimana Lengan 6-Sumbu bergerak dalam proyek ini? Apakah serupa atau berbeda dengan prediksi Anda? Mengapa?

Perhatikan bahwa ketika nilai x diubah, Lengan 6-Sumbu akan ditarik dan memanjang sepanjang sumbu x. Dalam animasi ini, Lengan 6-Sumbu memanjang ke depan menjauhi alas, dan ke belakang ke arahnya, sepanjang sumbu x.
Melangkah Melalui Proyek
Sekarang setelah Anda menjalankan proyek dengan tombol 'RUN', Anda juga dapat mengeksekusi proyek menggunakan tombol 'STEP'. Fitur Langkah mengeksekusi proyek satu blok dalam satu waktu. Hal ini memungkinkan Anda melihat dengan jelas bagaimana setiap blok dalam proyek berhubungan dengan perilaku robot. Ikuti langkah-langkah di bawah ini untuk menjalani proyek.
Tekan tombol LANGKAH.
Lengan 6-Sumbu akan bergerak ke Posisi Aman, lalu blok pertama dalam tumpukan yang terhubung ke Saat dimulai blok akan disorot. Dalam proyek ini, blok Pindah ke posisi akan disorot, tetapi tidak dijalankan hingga tombol LANGKAH ditekan kedua kalinya seperti yang ditunjukkan dalam video ini.
Tekan tombol STEP kedua kalinya untuk menjalankan blok Pindah ke posisi.
Setelah blok dijalankan, sorotan akan berpindah ke blok berikutnya dalam tumpukan, blok Tunggu, seperti yang ditunjukkan dalam video ini.
12. Menelusuri suatu proyek mengikuti suatu proses – pertama suatu blok disorot, lalu dieksekusi. Lanjutkan memilih tombol LANGKAH untuk mengeksekusi blok yang tersisa dalam proyek satu per satu, seperti yang ditunjukkan dalam video di bawah ini. Hal ini dapat sangat membantu saat mencoba memecahkan masalah suatu proyek, karena Anda dapat melihat perilaku robot individual dengan lebih jelas. Tonton video di bawah untuk melihat sisa proyek yang dijalankan dengan fitur Step.
Aktivitas
Sekarang setelah Anda mempelajari cara membuat kode Lengan 6-Sumbu untuk bergerak sepanjang sumbu x, Anda akan melatih keterampilan ini. Dalam aktivitas ini, Anda akan mengkode Lengan 6-Sumbu untuk bergerak sepanjang sumbu x untuk menemukan nilai x minimum dan maksimum yang dapat dicapai Lengan 6-Sumbu.
- Buat prediksi untuk nilai x minimum dan maksimum yang dapat dicapai oleh Lengan 6-Sumbu. Catat nilai prediksi di buku catatan teknik Anda.
- Dengan menggunakan proyek yang sama dari atas, ubah nilai x di blok Pindahkan ke posisike nilai prediksi Anda.
- Jalankan proyek Anda untuk menguji prediksi Anda. Pastikan Lengan 6-Sumbu Anda terhubung ke VEXcode.
- Teruskan memprediksi dan menguji nilai-x yang berbeda. Pastikan untuk mencatat prediksi dan hasil Anda di buku catatan teknik saat menguji proyek Anda. Berapa nilai minimum dan maksimum yang Anda temukan?
- Bandingkan hasil Anda dengan nilai kelompok lain. Apakah mereka serupa atau berbeda? Kelompok manakah yang memiliki nilai terbesar dan terkecil? Uji nilai-nilai tersebut dan sesuaikan hasil Anda jika diperlukan.
Periksa Pemahaman Anda
Sebelum memulai Pelajaran berikutnya, pastikan Anda memahami konsep dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
Pilih Berikutnya > untuk melengkapi Refleksi Tengah-Unit.