
Ders 3: X Ekseninde Otonom Hareket
Önceki Ders'te, programlama dilinin ne olduğu, robot davranışının ne olduğu ve robot davranışlarının nasıl değiştirileceği dahil olmak üzere bilgisayar biliminin temellerini öğrendiniz. Daha sonra bu becerilerinizi 6 Eksenli Robotik Kolun davranışlarını belirleyerek uyguladınız.
Bu Ders'te, 6 Eksenli Kol'un x ekseni boyunca hareket etmesini nasıl kodlayacağınızı öğreneceksiniz.
Bu Dersin sonunda, 6 Eksenli Kolun x ekseni boyunca hareket etmesini kodlayarak, 6 Eksenli Kolun hareket edebileceği minimum ve maksimum x değerini bulacaksınız.
X Ekseninde 6 Eksenli Kolun Kodlanması
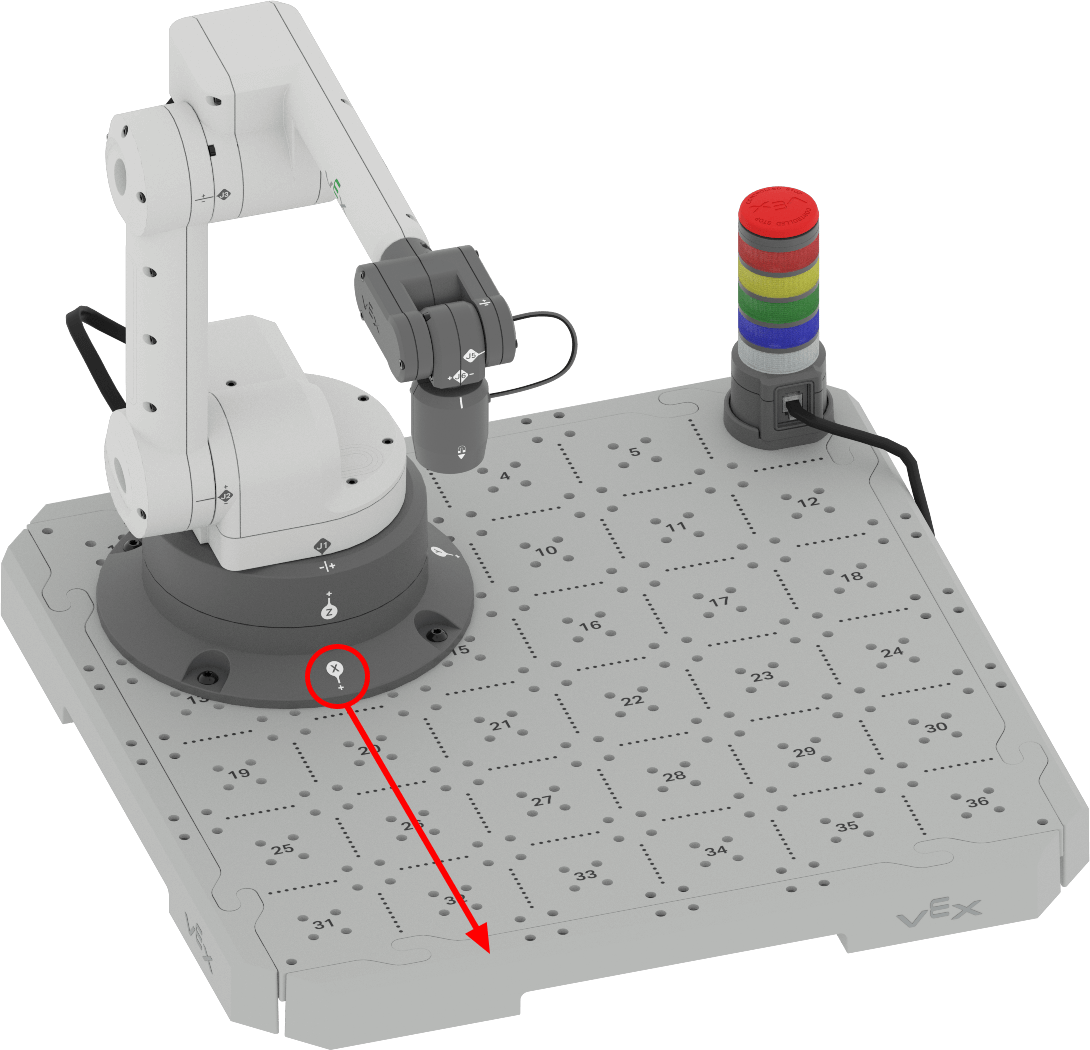
6 Eksenli Kolun 3 boyutlu uzayda nasıl hareket ettiği ve koordinatları hakkındaki bilgileri kullanarak 6 Eksenli Kolun x ekseni boyunca otonom olarak hareket etmesini kodlayabilirsiniz. 6 Eksenli Kolun x ekseni boyunca hareket etmesini sağlamak için aşağıdaki adımları izleyin.
VEXcode'da Yeni Blok Projesi açın.
Yeni bir proje açmak için videodaki adımları izleyin.
Dosya menüsünü açmak için Araç Çubuğu'ndaDosyaseçeneğini seçin, ardındanYeni Blok Projesi'ni seçin.EXP Beyin veya 6 Eksenli Kol seçeneğiyle bir açılır pencere görüntülenir. 6-Eksenli Kolseçin. Daha sonra yeni proje açılır.
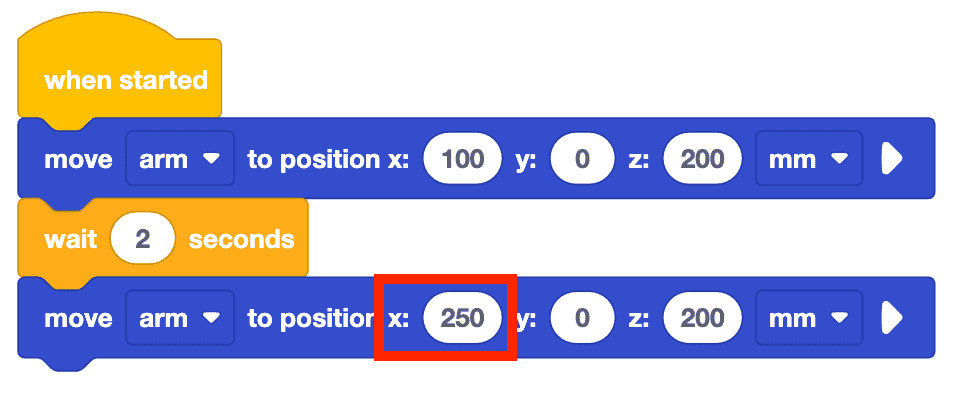
Burada gösterilen projeyi, blokları Çalışma Alanına sürükleyip gösterildiği gibi ekleyerek yeniden oluşturun.
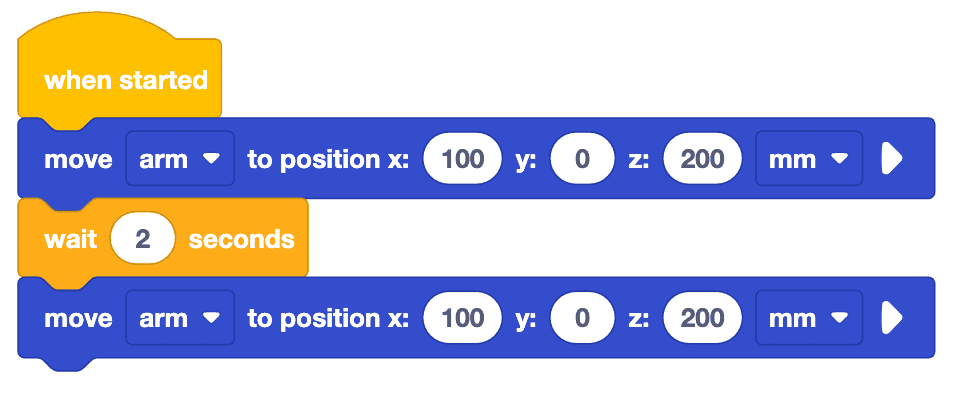
Bu proje, 6 Eksenli Kolun ucunu uzayda hareket ettirmek için Move to position bloğunu kullanır. Bu blokta x, y ve z koordinat değerlerinin girilmesi için boşluklar bulunmaktadır. Bu blok, bu Ders boyunca 6 Eksenli Kolu yeni bir koordinata taşımak için kullanılacaktır.
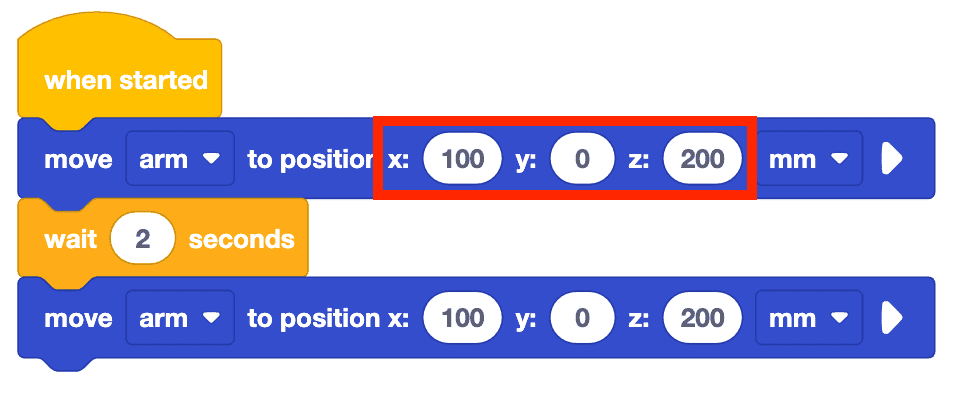
Bu bloğun tam koordinat değerlerini (100, 0, 200) içerdiğine dikkat edin. 6 Eksenli Kolun istenilen yere hareket edebilmesi için her eksen için bir değere ihtiyaç duyduğunu hatırlayalım.
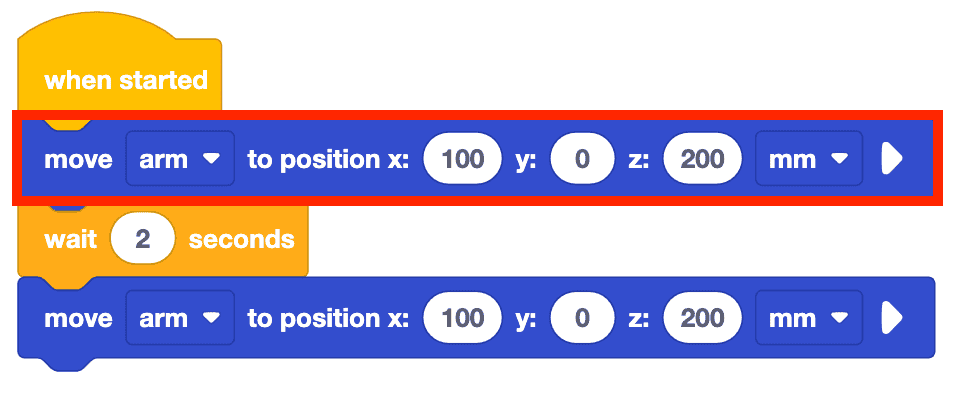
İkinci x değerini değiştirin. 100mm'den 250mm'ye blok pozisyonuna geçin.
Sizce bu durum 6 Eksenli Kol'un ne yapmasına sebep olur? Tahmininizi mühendislik not defterinize kaydedin.
Not: Burada y ve z değerleri değiştirilmiyor çünkü amaç bir seferde bir ekseni değiştirmek ve gözlemlemek. Y ve z değerlerini aynı tutup x değerlerini değiştirerek 6 Eksenli Kolun x ekseninde nasıl hareket edeceğini görebiliriz.
Projeyi yeniden adlandırın ve cihazınıza kaydedin.
6-Eksen Kolunun VEXcode'a bağlı olduğundan emin olun. Projeyi çalıştırın.
6 Eksenli Kolun x ekseni boyunca hareketini gözlemleyin. 6 Eksenli Kolun Güvenli Pozisyona (120, 0, 100) hareket ederek başlayacağını ve ardından projeyi yürüteceğini unutmayın.
6 Eksenli Kol hareket etmeyi bıraktığında projeyi durdurun.
Gözlemlerinizi mühendislik not defterinize kaydedin. Bu projede 6 Eksenli Kol nasıl hareket etti? Tahmininizle benzer mi yoksa farklı mı? Neden?
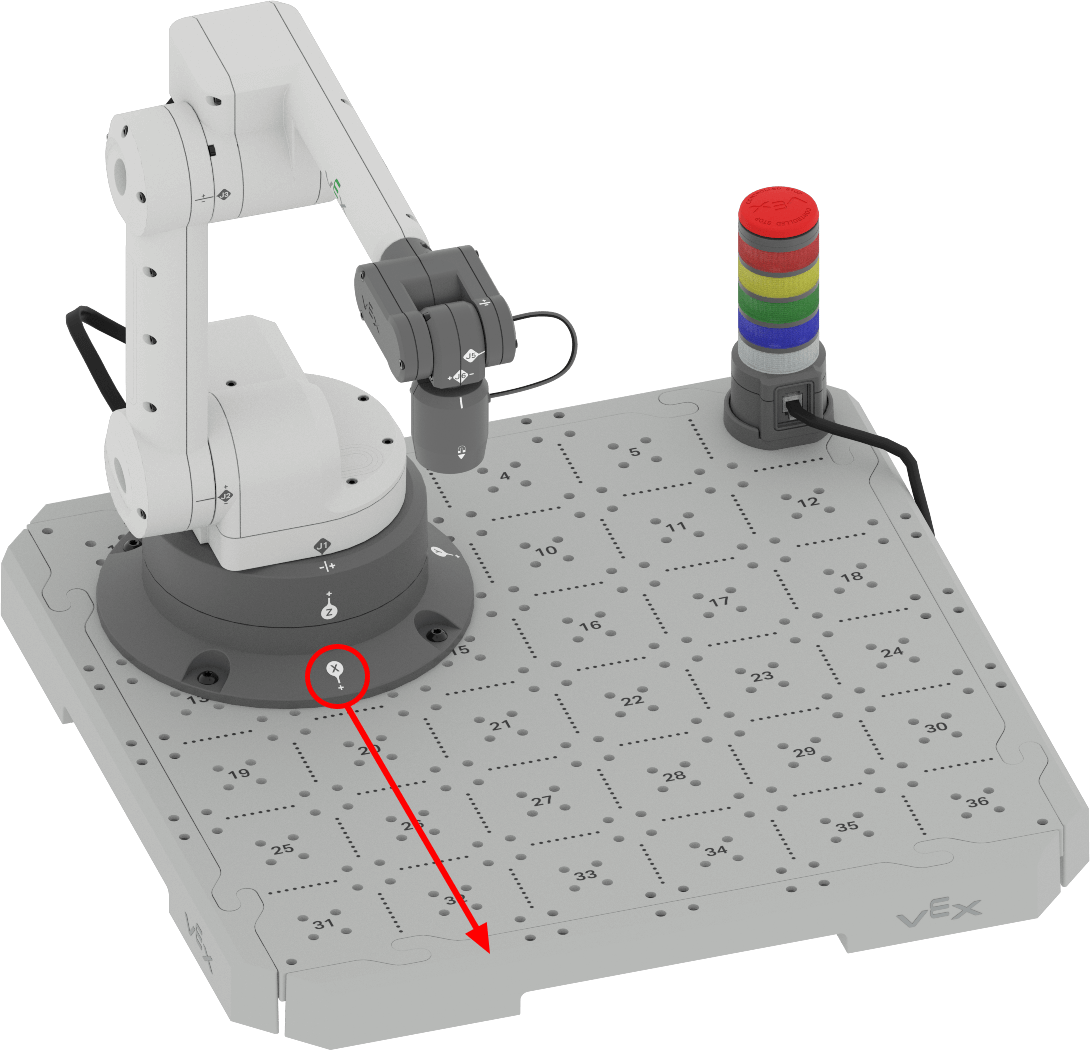
X değeri değiştirildiğinde 6 Eksenli Kolun x ekseni boyunca geri çekilip uzadığına dikkat edin. Bu animasyonda, 6 Eksenli Kol x ekseni boyunca tabandan ileriye doğru ve tabana doğru geriye doğru uzuyor.
Projede Adım Adım
Artık projeyi 'ÇALIŞTIR' butonuyla çalıştırdığınıza göre, 'ADIM' butonunu kullanarak da projeyi çalıştırabilirsiniz. Adım özelliği bir projeyi her seferinde bir blok halinde yürütür. Bu, projedeki her bloğun bir robot davranışına nasıl karşılık geldiğini net bir şekilde görmenizi sağlayabilir. Projeyi adım adım incelemek için aşağıdaki adımları izleyin.
ADIM butonuna basın.
6 Eksenli Kol Güvenli Pozisyona hareket edecek, ardından yığındaki bağlı ilk blok blok vurgulanacaktır. Bu projede, pozisyona taşı bloğu vurgulanacak, ancak bu videoda gösterildiği gibi ADIM düğmesine ikinci kez basılana kadar yürütülmeyecektir.
Pozisyon bloğunu çalıştırmak için STEP butonuna ikinci kez basın.
Blok çalıştırıldığında, vurgulama, bu videoda gösterildiği gibi yığındaki bir sonraki bloğa, yani Waitbloğuna geçecektir.
12. Bir projede adım adım ilerlemek bir süreci takip eder; önce bir blok vurgulanır, sonra yürütülür. Aşağıdaki videoda gösterildiği gibi, projedeki kalan blokları birer birer yürütmek için ADIM düğmesini seçmeye devam edin. Bu, bir projede sorun gidermeye çalışırken çok faydalı olabilir, çünkü bireysel robot davranışlarını daha net bir şekilde görüntüleyebilirsiniz. Projenin geri kalanının Step özelliğiyle nasıl yürütüldüğünü görmek için aşağıdaki videoyu izleyin.
Etkinlik
Artık 6 Eksenli Kolun x ekseni boyunca hareket etmesini nasıl kodlayacağınızı öğrendiğinize göre, bu becerileri uygulayacaksınız. Bu aktivitede, 6 Eksenli Kolun x ekseni boyunca hareket etmesini kodlayarak, 6 Eksenli Kolun hareket edebileceği minimum ve maksimum x değerlerini bulacaksınız.
- 6 Eksenli Kolun hareket edebileceği minimum ve maksimum x değerleri için bir tahmin yapın. Tahmin edilen değerleri mühendislik not defterinize kaydedin.
- Yukarıdaki aynı projeyi kullanarak Move to positionbloklarındaki x değerlerini tahmin ettiğiniz değerlere değiştirin.
- Tahminlerinizi test etmek için projenizi çalıştırın. 6 Eksenli Kolunuzun VEXcode'a bağlı olduğundan emin olun.
- Farklı x değerlerini tahmin etmeye ve test etmeye devam edin. Projelerinizi test ederken tahminlerinizi ve sonuçlarınızı mühendislik not defterinize kaydetmeyi unutmayın. Hangi minimum ve maksimum değerleri buluyorsunuz?
- Sonuçlarınızı diğer grupların değerleriyle karşılaştırın. Benzerler mi yoksa farklılar mı? Hangi grubun değerleri en büyük ve en küçük? Bu değerleri test edin ve gerekirse sonuçlarınızı ayarlayın.
Anlayışınızı Kontrol Edin
Bir sonraki Derse başlamadan önce, aşağıdaki belgedeki soruları mühendislik defterinize yanıtlayarak bu Dersteki kavramları anladığınızdan emin olun.
Anladığınızı Kontrol Edin soruları > (Google Dokümanı / .docx / .pdf)
Orta Ünite Yansıtma'yı tamamlamak için Sonraki > seçin.