
Lección 3: Movimiento autónomo a lo largo del eje X
En la lección anterior, aprendió sobre los fundamentos de la informática, incluido qué es un lenguaje de programación, qué es el comportamiento de un robot y cómo modificar el comportamiento de un robot. Luego aplicó estas habilidades identificando los comportamientos del brazo robótico de 6 ejes.
En esta lección, aprenderá a codificar el brazo de 6 ejes para que se mueva a lo largo del eje x.
Al final de esta lección, codificará el brazo de 6 ejes para que se mueva a lo largo del eje x para encontrar el valor x mínimo y máximo al que se puede mover el brazo de 6 ejes.
Codificación del brazo de 6 ejes a lo largo del eje X
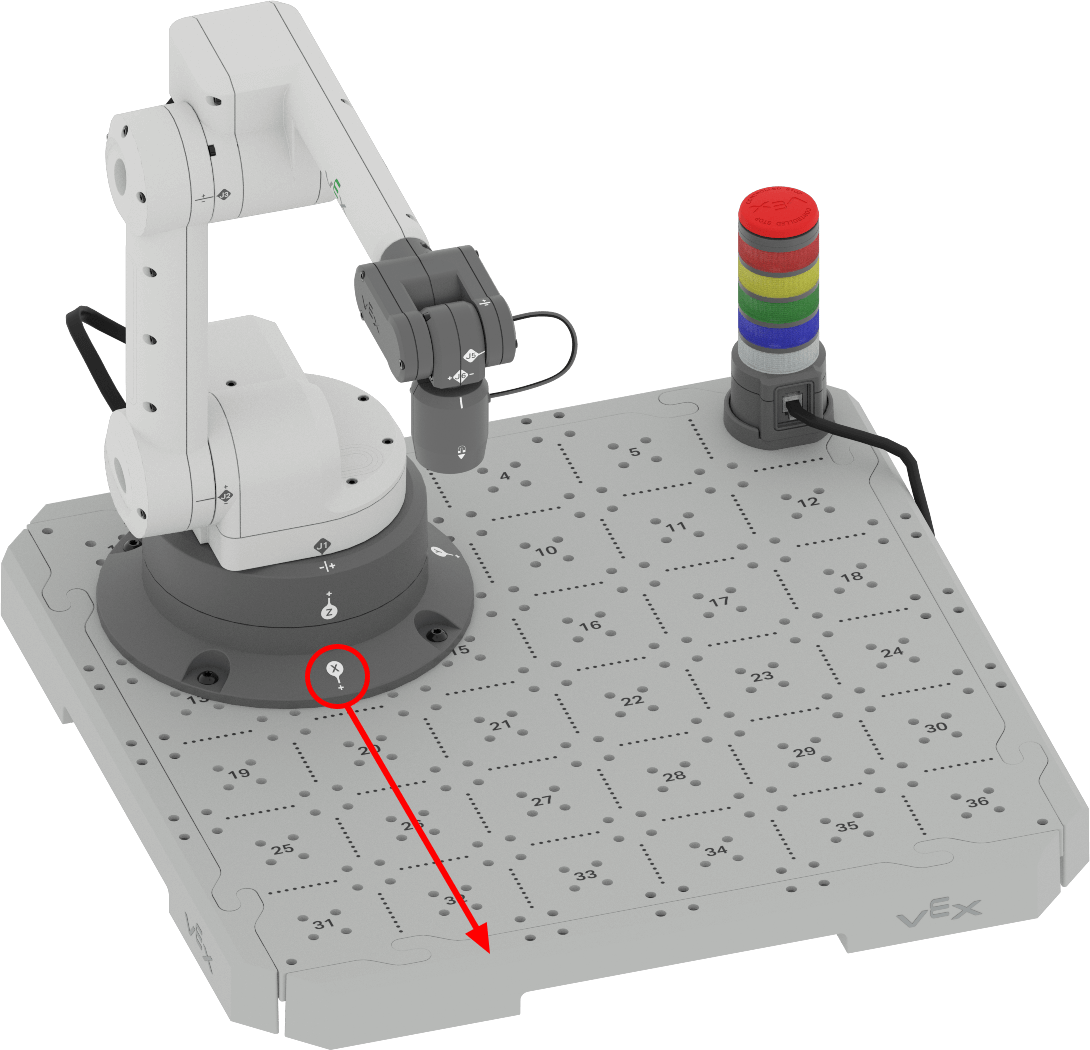
Puede utilizar la información sobre las coordenadas y cómo se mueve el brazo de 6 ejes en el espacio 3D para codificar el brazo de 6 ejes para que se mueva de forma autónoma a lo largo del eje x. Siga los pasos a continuación para codificar el brazo de 6 ejes para que se mueva a lo largo del eje x.
En VEXcode, abra un proyecto nuevos bloques.
Siga los pasos del vídeo para abrir un nuevo proyecto.
Seleccione la opción Archivo en la barra de herramientas para abrir el menú Archivo, luego seleccione Nuevo proyecto de bloques. Aparece una ventana emergente con la opción EXP Brain o 6-Axis Arm. Seleccionar Brazo de 6 ejes. Luego se abre el nuevo proyecto.
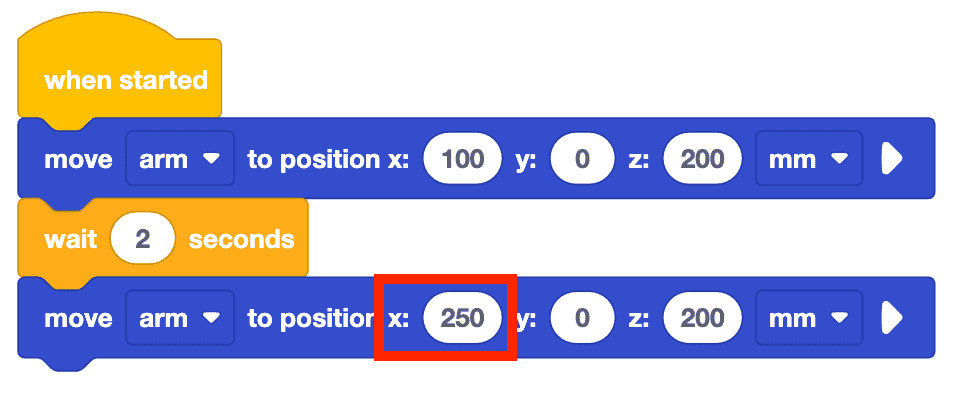
Recrea el proyecto que se muestra aquí arrastrando bloques al espacio de trabajo y adjuntándolos como se muestra.
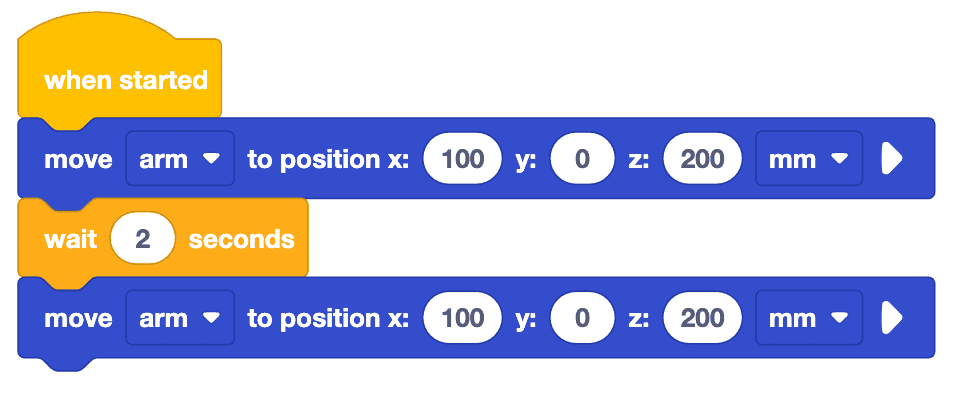
Este proyecto utiliza el bloque Mover a la posición para mover el extremo del brazo de 6 ejes en el espacio. Este bloque tiene espacios para ingresar los valores de las coordenadas x, y y z. Este bloque se utilizará a lo largo de esta lección para mover el brazo de 6 ejes a una nueva coordenada.
Tenga en cuenta que este bloque incluye los valores de coordenadas completos (100, 0, 200). Recuerde que el brazo de 6 ejes requiere un valor para cada eje para poder moverse a la ubicación deseada.
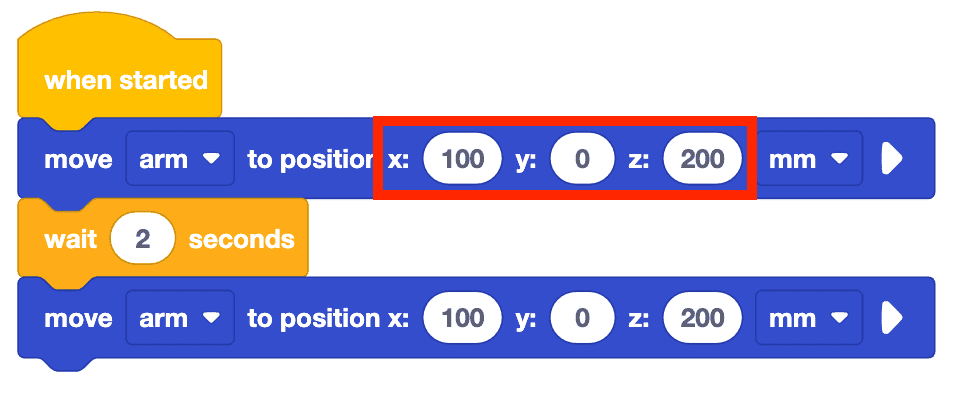
Cambiar el valor x en el segundo bloque Mover a la posición de 100 mm a 250 mm.
¿Qué crees que esto provocará en el brazo de 6 ejes? Registra tu predicción en tu cuaderno de ingeniería.
Nota: Los valores y y z no se modifican aquí porque el objetivo es cambiar y observar un eje a la vez. Manteniendo los valores y y z iguales pero cambiando los valores x podemos ver cómo se moverá el brazo de 6 ejes a lo largo del eje x.
Cambie el nombre del proyecto y guárdelo en su dispositivo.
Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecutar el proyecto.
Observe el brazo de 6 ejes mientras se mueve a lo largo del eje x. Tenga en cuenta que el brazo de 6 ejes comenzará a moverse a la posición segura (120, 0, 100) y luego ejecutará el proyecto.
Detenga el proyecto una vez que el brazo de 6 ejes haya dejado de moverse.
Registra tus observaciones en tu cuaderno de ingeniería. ¿Cómo se movió el brazo de 6 ejes en este proyecto? ¿Es similar o diferente a tu predicción? ¿Por qué?
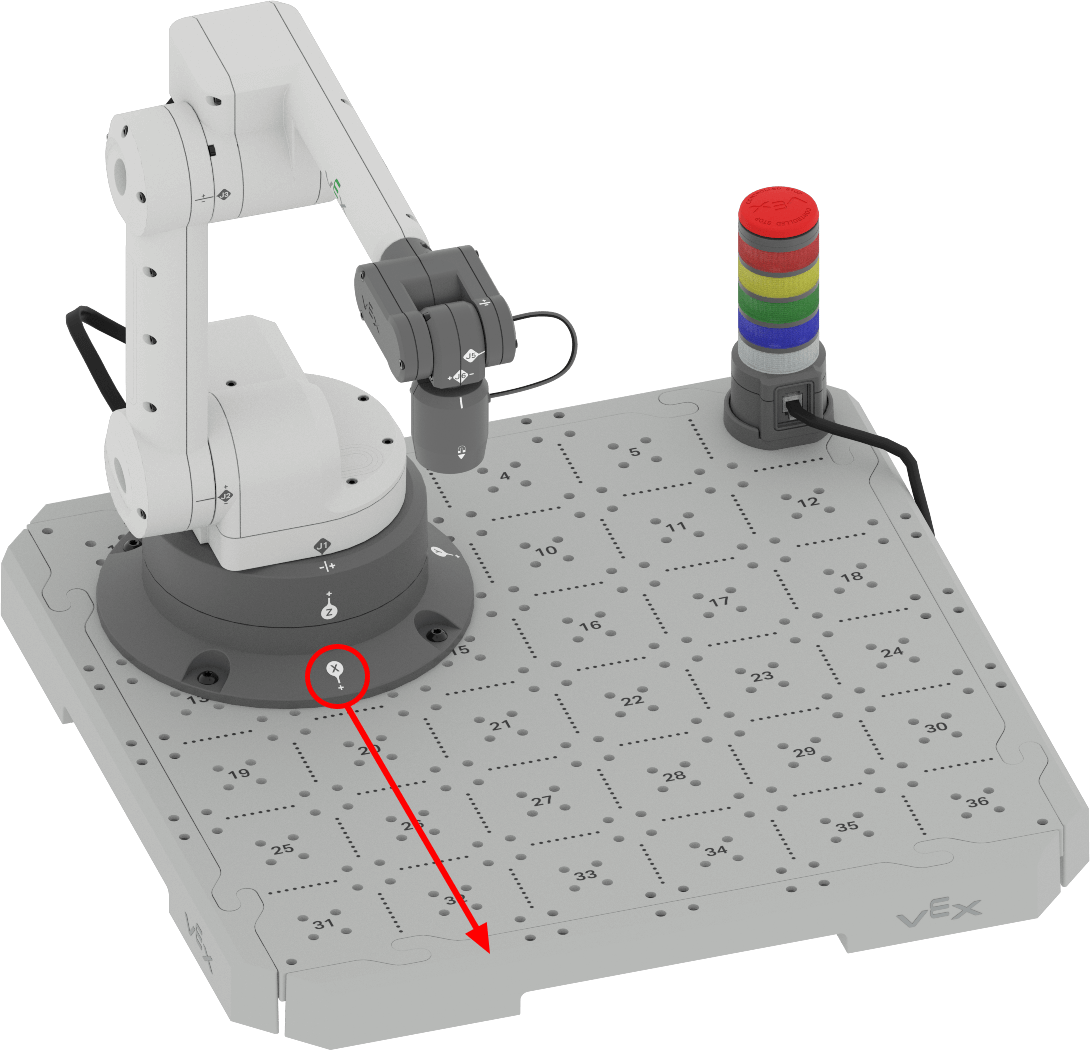
Tenga en cuenta que cuando se cambia el valor x, el brazo de 6 ejes se retrae y se extiende a lo largo del eje x. En esta animación, el brazo de 6 ejes se extiende hacia adelante alejándose de la base y hacia atrás en dirección a ella, a lo largo del eje x.
Paso a paso a través del proyecto
Ahora que ha ejecutado el proyecto con el botón 'EJECUTAR', también puede ejecutarlo utilizando el botón 'PASO'. La función Paso ejecuta un proyecto un bloque a la vez. Esto puede permitirle ver claramente cómo cada bloque del proyecto corresponde a un comportamiento del robot. Siga los pasos a continuación para completar el proyecto.
Presione el botón PASO.
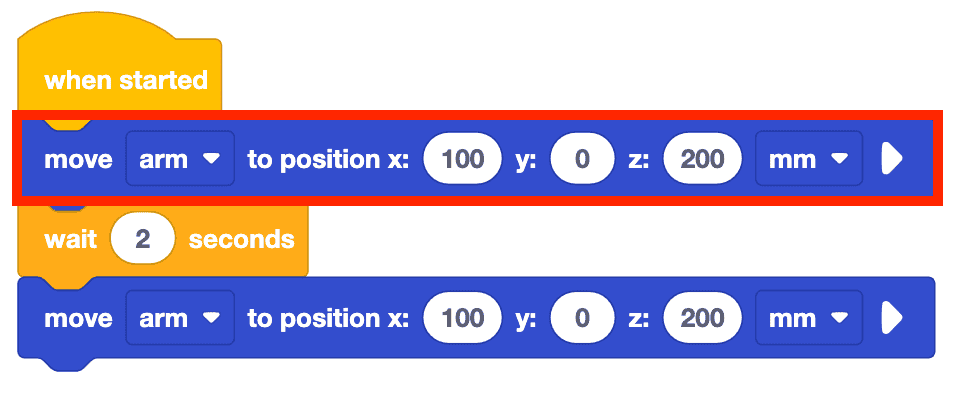
El brazo de 6 ejes se moverá a la posición segura y luego se resaltará el primer bloque de la pila conectado al bloque Cuando se inicia, se resaltará el bloque. En este proyecto, el bloque Mover a la posición se resaltará, pero no se ejecutará hasta que se presione el botón PASO por segunda vez, como se muestra en este video.
Presione el botón PASO una segunda vez para ejecutar el bloque Mover a la posición.
Una vez que se ejecuta el bloque, el resaltado se moverá al siguiente bloque en la pila, el bloque Esperar , como se muestra en este video.
12. El avance de un proyecto sigue un proceso: primero se resalta un bloque y luego se ejecuta. Continúe seleccionando el botón PASO para ejecutar los bloques restantes del proyecto uno a la vez, como se muestra en el video a continuación. Esto puede ser muy útil al intentar solucionar problemas en un proyecto, ya que permite ver los comportamientos de cada robot con mayor claridad. Vea el video a continuación para ver el resto del proyecto ejecutado con la función Paso.
Actividad
Ahora que ha aprendido a codificar el brazo de 6 ejes para que se mueva a lo largo del eje x, practicará estas habilidades. En esta actividad, codificará el brazo de 6 ejes para que se mueva a lo largo del eje x para encontrar los valores x mínimos y máximos a los que puede moverse el brazo de 6 ejes.
- Haga una predicción de los valores x mínimos y máximos a los que puede moverse el brazo de 6 ejes. Registre los valores previstos en su cuaderno de ingeniería.
- Usando el mismo proyecto de arriba, los valores x en los bloques valores predichos.
- Ejecute su proyecto para probar sus predicciones. Asegúrese de que su brazo de 6 ejes esté conectado a VEXcode.
- Continúe prediciendo y probando diferentes valores de x. Asegúrese de registrar sus predicciones y resultados en su cuaderno de ingeniería cuando pruebe sus proyectos. ¿Qué valores mínimos y encuentras?
- Compare sus resultados con los valores de otros grupos. ¿Son similares o diferentes? ¿Qué grupo tiene los valores más grandes y más pequeños? Pruebe esos valores y ajuste los resultados si es necesario.
Comprueba tu comprensión
Antes de comenzar la siguiente lección, asegúrese de comprender los conceptos de esta lección respondiendo las preguntas del documento a continuación en su cuaderno de ingeniería.
Preguntas para comprobar su comprensión > (Google Doc / .docx / .pdf)
Seleccione Siguiente > para completar la Reflexión de mitad de unidad.