
Lezione 3: Movimento autonomo lungo l'asse X
Nella lezione precedente hai imparato i fondamenti dell'informatica, tra cui cos'è un linguaggio di programmazione, cos'è il comportamento di un robot e come modificarne i comportamenti. Hai poi applicato queste competenze identificando i comportamenti del braccio robotico a 6 assi.
In questa lezione imparerai come programmare il braccio a 6 assi affinché si muova lungo l'asse x.
Al termine di questa lezione, programmerai il braccio a 6 assi in modo che si muova lungo l'asse x per trovare il valore x minimo e massimo a cui il braccio a 6 assi può muoversi.
Codifica del braccio a 6 assi lungo l'asse X
È possibile utilizzare le informazioni sulle coordinate e sul modo in cui il braccio a 6 assi si muove nello spazio 3D per codificare il braccio a 6 assi in modo che si muova autonomamente lungo l'asse x. Seguire i passaggi sottostanti per codificare il braccio a 6 assi in modo che si muova lungo l'asse x.
In VEXcode, apri un progetto New Blocks.
Segui i passaggi nel video per aprire un nuovo progetto.
Selezionare l'opzione File nella barra degli strumenti per aprire il menu File, quindi selezionare Nuovo progetto blocchi. Viene visualizzata una finestra pop-up con l'opzione per EXP Brain o 6-Axis Arm. Seleziona Braccio a 6 assi. Viene quindi aperto il nuovo progetto.
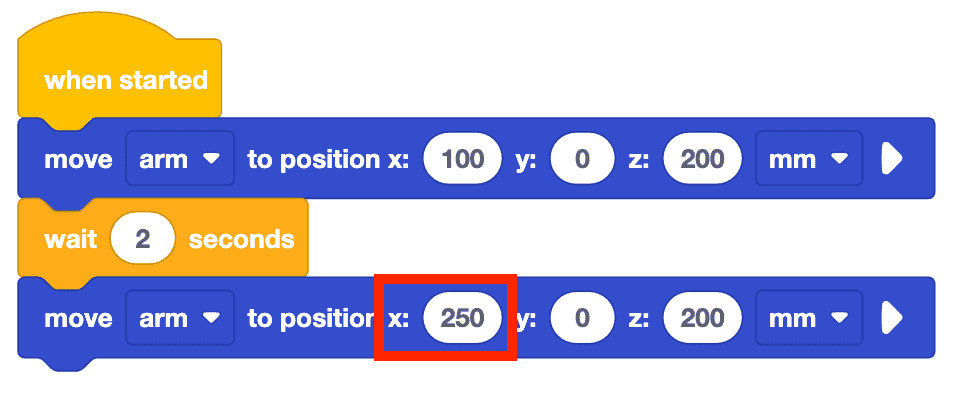
Ricrea il progetto mostrato qui trascinando i blocchi nell'area di lavoro e collegandoli come mostrato.
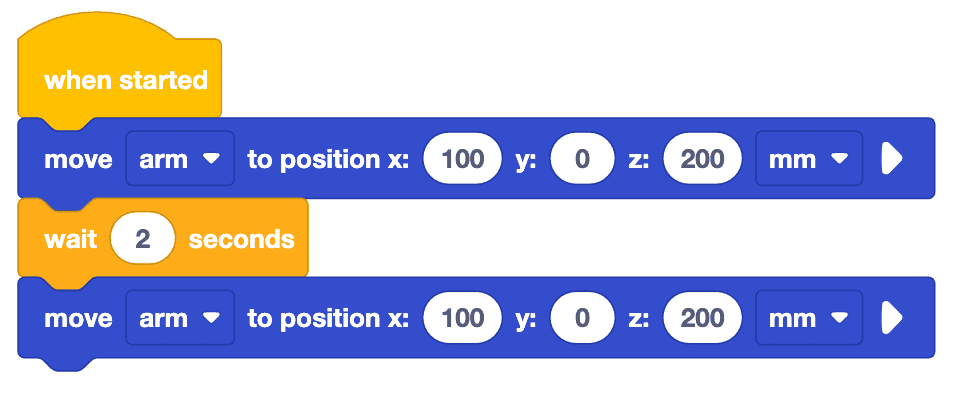
Questo progetto utilizza il blocco Sposta in posizione per spostare l'estremità del braccio a 6 assi nello spazio. Questo blocco contiene spazi in cui inserire i valori delle coordinate x, y e z. Questo blocco verrà utilizzato durante la lezione per spostare il braccio a 6 assi su una nuova coordinata.
Si noti che questo blocco include i valori completi delle coordinate (100, 0, 200). Ricorda che il braccio a 6 assi richiede un valore per ciascun asse per potersi spostare nella posizione desiderata.
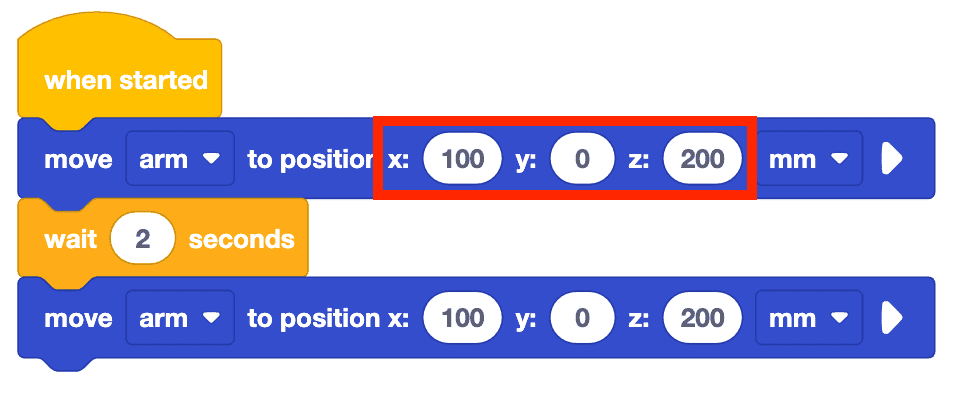
Modificare il valore x nel secondo blocco Spostarsi nella posizione da 100 mm a 250 mm.
Secondo te, cosa comporterà questo braccio a 6 assi? Annota la tua previsione nel tuo quaderno di progettazione.
Nota: i valori y e z non vengono modificati qui perché l'obiettivo è modificare e osservare un asse alla volta. Mantenendo invariati i valori y e z ma modificando i valori x possiamo vedere come si muoverà il braccio a 6 assi lungo l'asse x.
Rinomina il progetto e salvalo sul tuo dispositivo.
Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Esegui il progetto.
Osservare il braccio a 6 assi mentre si muove lungo l'asse x. Si noti che il braccio a 6 assi inizierà spostandosi nella posizione sicura (120, 0, 100), quindi eseguirà il progetto.
Interrompere il progetto una volta che il braccio a 6 assi ha smesso di muoversi.
Annota le tue osservazioni sul tuo quaderno di progettazione. Come si è mosso il braccio a 6 assi in questo progetto? È simile o diverso dalla tua previsione? Perché?
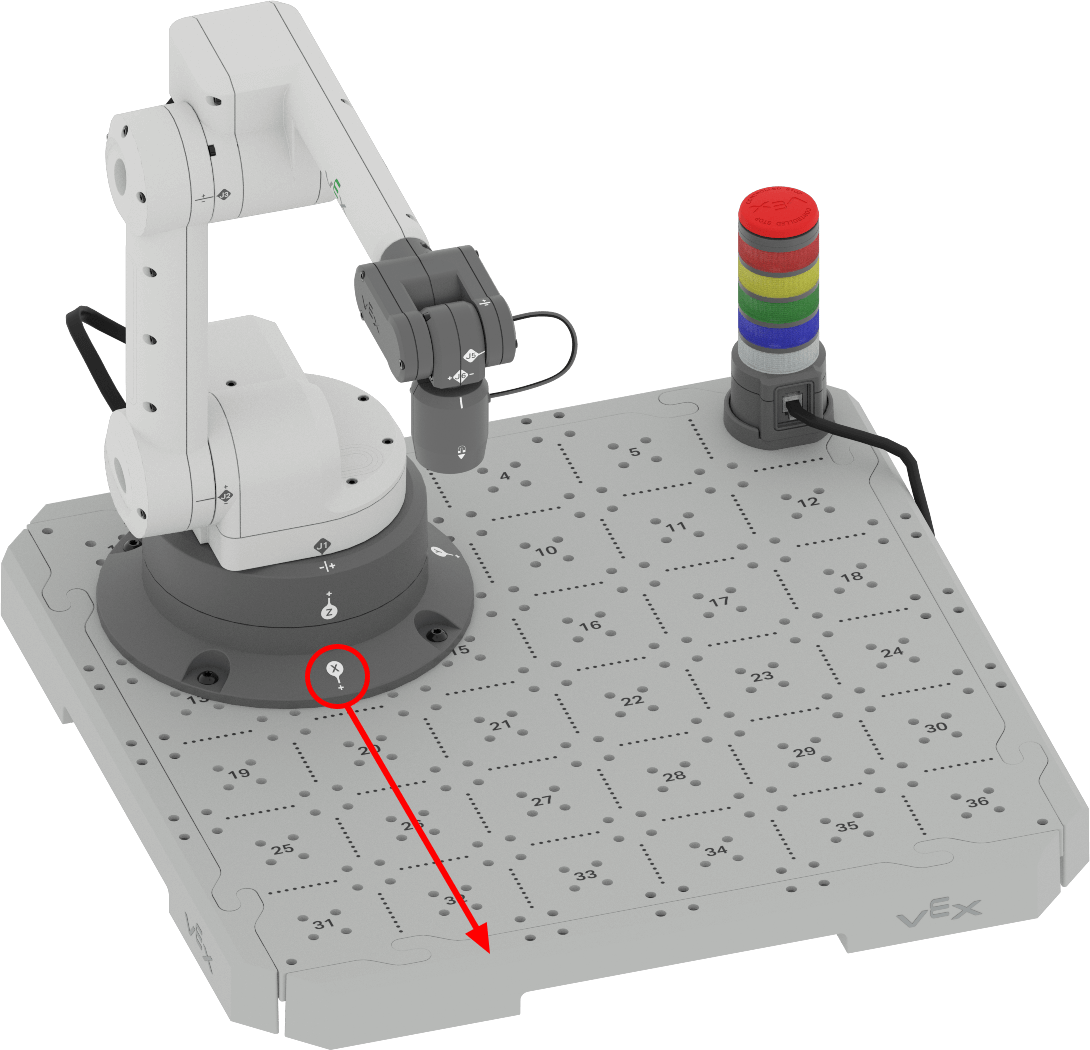
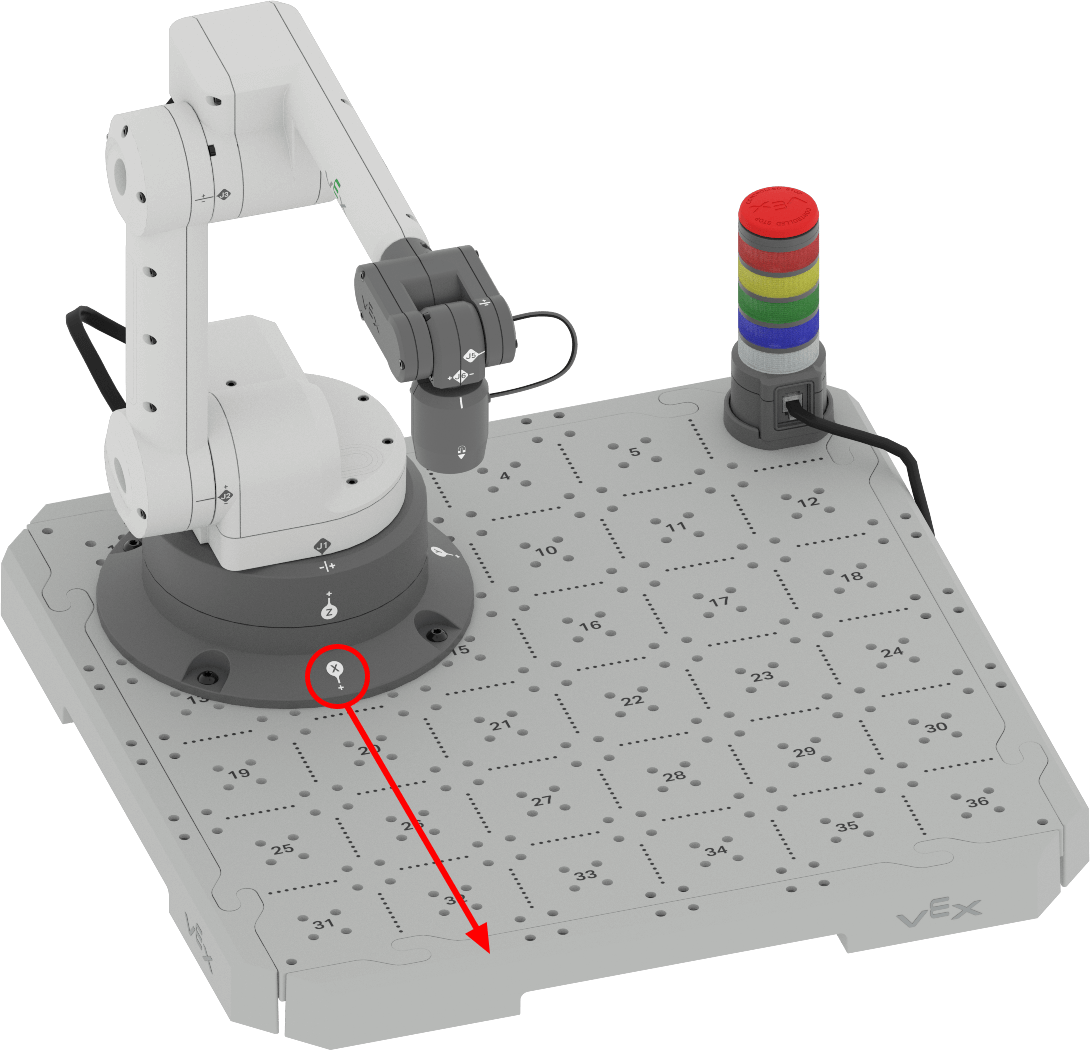
Si noti che quando si modifica il valore x, il braccio a 6 assi si ritrae e si estende lungo l'asse x. In questa animazione, il braccio a 6 assi si estende in avanti, allontanandosi dalla base, e all'indietro verso di essa, lungo l'asse x.
Procedendo attraverso il progetto
Ora che hai eseguito il progetto con il pulsante 'RUN', puoi eseguirlo anche utilizzando il pulsante 'STEP'. La funzione Step esegue un progetto un blocco alla volta. Ciò consente di vedere chiaramente come ogni blocco del progetto corrisponde al comportamento del robot. Per procedere nel progetto, seguire i passaggi indicati di seguito.
Premere il pulsante STEP.
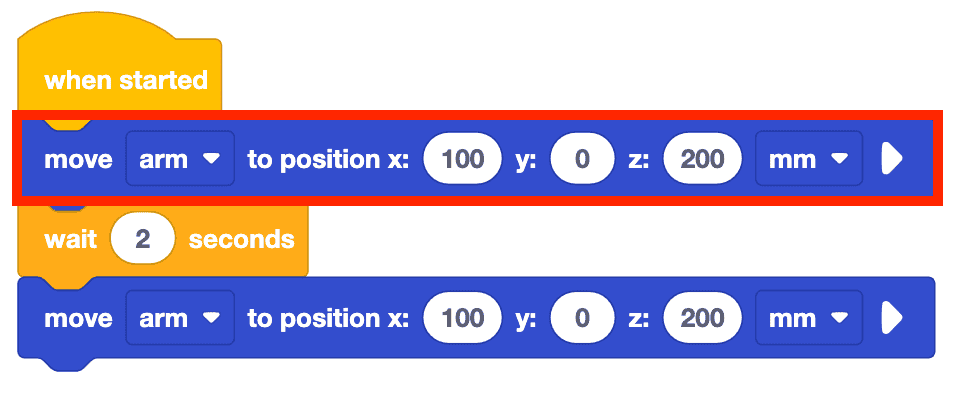
Il braccio a 6 assi si sposterà nella posizione di sicurezza, quindi verrà evidenziato il primo blocco nella pila collegato al blocco All'avvio. In questo progetto, il blocco Sposta in posizione verrà evidenziato, ma non verrà eseguito finché non verrà premuto una seconda volta il pulsante PASSAGGIO come mostrato in questo video.
Premere nuovamente il pulsante STEP per eseguire il blocco Sposta in posizione.
Una volta eseguito il blocco, l'evidenziazione si sposterà sul blocco successivo nella pila, il blocco Wait , come mostrato in questo video.
12. L'esecuzione di un progetto segue un processo: prima viene evidenziato un blocco, poi viene eseguito. Continuare a selezionare il pulsante STEP per eseguire uno alla volta i blocchi rimanenti del progetto, come mostrato nel video qui sotto. Questo può essere molto utile quando si cerca di risolvere un problema in un progetto, poiché è possibile visualizzare più chiaramente i comportamenti dei singoli robot. Guarda il video qui sotto per vedere il resto del progetto eseguito con la funzione Step.
Attività
Ora che hai imparato come programmare il braccio a 6 assi per muoversi lungo l'asse x, metterai in pratica queste competenze. In questa attività, programmerai il braccio a 6 assi in modo che si muova lungo l'asse x per trovare i valori x minimi e massimi a cui il braccio a 6 assi può muoversi.
- Effettuare una previsione dei valori x minimi e massimi a cui può muoversi il braccio a 6 assi. Registra i valori previsti nel tuo quaderno di progettazione.
- Utilizzando lo stesso progetto di cui sopra, modifica i valori x nei blocchi Sposta nella posizione in i valori previsti.
- Esegui il progetto per testare le tue previsioni. Assicurati che il tuo braccio a 6 assi sia connesso a VEXcode.
- Continuare a prevedere e testare diversi valori x. Quando testi i tuoi progetti, assicurati di registrare le tue previsioni e i risultati nel tuo quaderno di progettazione. Quali valori minimi e massimi trovi?
- Confronta i tuoi risultati con i valori degli altri gruppi. Sono simili o diversi? Quale gruppo ha i valori più grandi e più piccoli? Prova questi valori e modifica i risultati se necessario.
Controlla la tua comprensione
Prima di iniziare la lezione successiva, assicurati di aver compreso i concetti di questa lezione rispondendo alle domande nel documento sottostante nel tuo quaderno di .
Controlla le tue domande di comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per completare la riflessione di metà unità.