
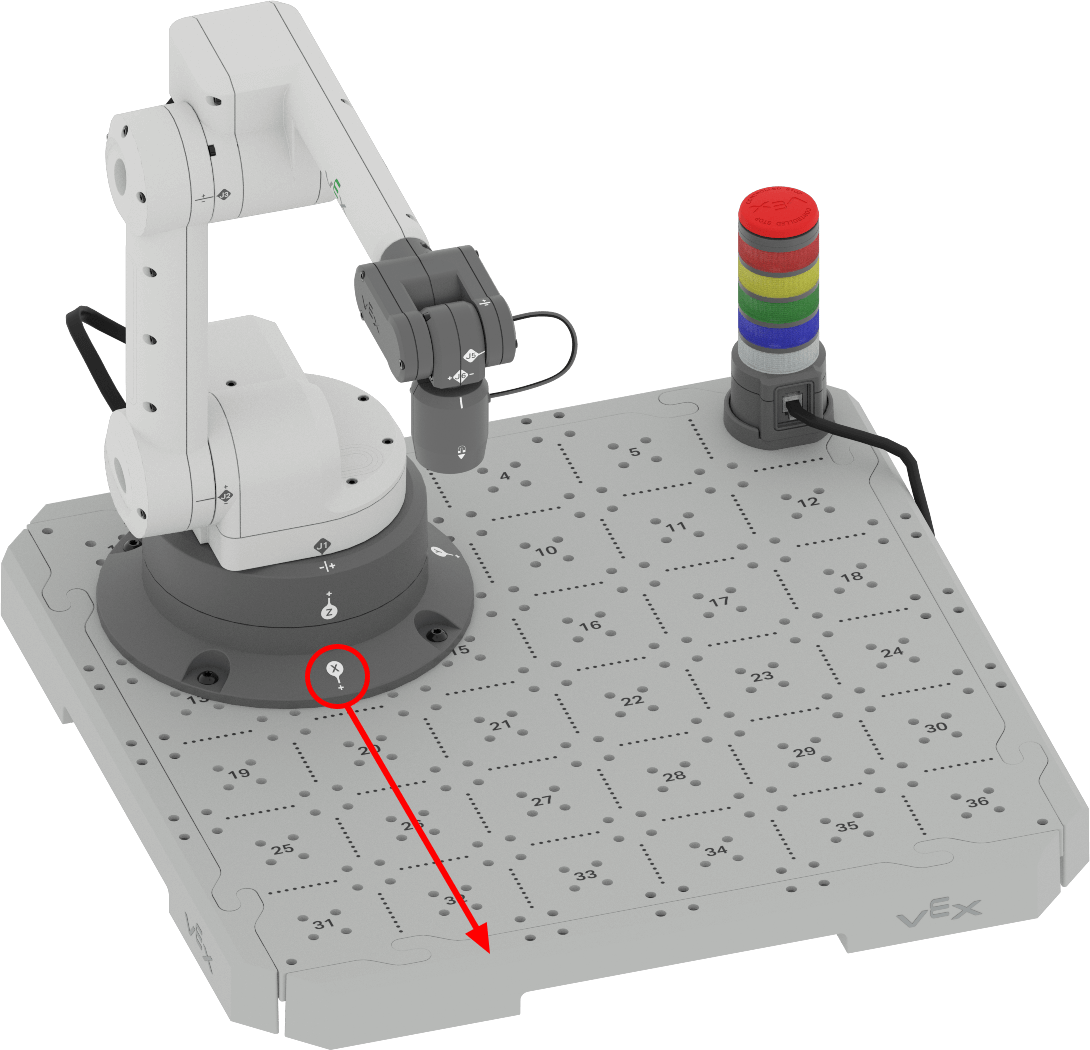
Lektion 3: Autonome Bewegung entlang der X-Achse
In der vorherigen Lektion haben Sie die Grundlagen der Informatik kennengelernt, unter anderem, was eine Programmiersprache ist, was Roboterverhalten ist und wie man Roboterverhalten ändert. Diese Fähigkeiten haben Sie dann angewendet, indem Sie die Verhaltensweisen des 6-Achsen-Roboterarms identifiziert haben.
In dieser Lektion lernen Sie, wie Sie den 6-Achsen-Arm so programmieren, dass er sich entlang der X-Achse bewegt.
Am Ende dieser Lektion werden Sie den 6-Achsen-Arm so codieren, dass er sich entlang der X-Achse bewegt, um den minimalen und maximalen X-Wert zu finden, zu dem sich der 6-Achsen-Arm bewegen kann.
Kodierung des 6-Achsen-Arms entlang der X-Achse
Sie können die Informationen zu den Koordinaten und zur Bewegung des 6-Achsen-Arms im 3D-Raum verwenden, um den 6-Achsen-Arm so zu codieren, dass er sich autonom entlang der X-Achse bewegt. Befolgen Sie die nachstehenden Schritte, um den 6-Achsen-Arm für die Bewegung entlang der X-Achse zu codieren.
Öffnen Sie in VEXcode ein New Blocks-Projekt.
Befolgen Sie die Schritte im Video, um ein neues Projekt zu öffnen.
Wählen Sie die Option Datei in der Symbolleiste, um das Menü Datei zu öffnen, und wählen Sie dann Neues Blockprojekt. Ein Popup-Fenster mit der Option für EXP Brain oder 6-Achsen-Arm wird angezeigt. Wählen Sie 6-Achsen-Arm. Anschließend wird das neue Projekt geöffnet.
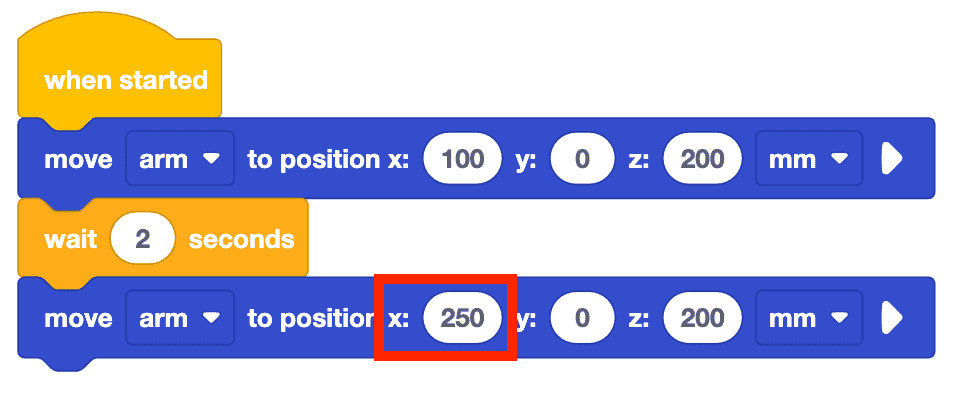
Erstellen Sie das hier gezeigte Projekt neu, indem Sie Blöcke in den Arbeitsbereich ziehen und sie wie gezeigt anhängen.
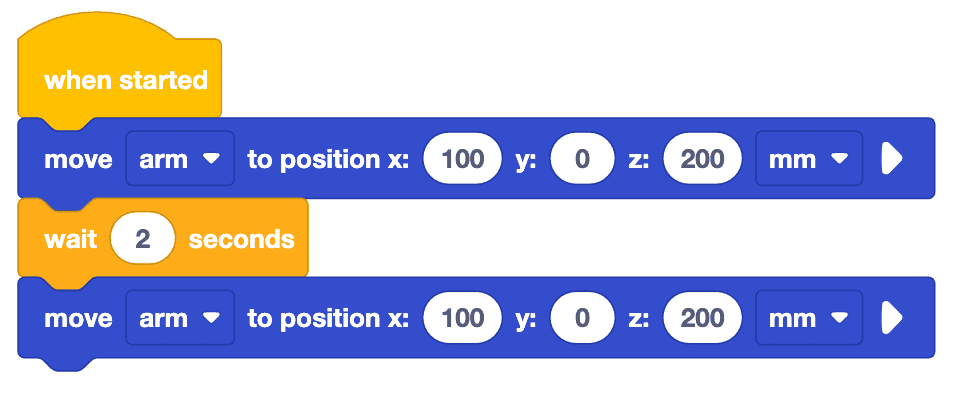
Dieses Projekt verwendet den Block – Zu Position bewegen“, um das Ende des 6-Achsen-Arms im Raum zu bewegen. Dieser Block verfügt über Felder zur Eingabe von x-, y- und z-Koordinatenwerten. Dieser Block wird in dieser Lektion verwendet, um den 6-Achsen-Arm an eine neue Koordinate zu bewegen.
Beachten Sie, dass dieser Block die vollständigen Koordinatenwerte (100, 0, 200) enthält. Denken Sie daran, dass der 6-Achsen-Arm für jede Achse einen Wert benötigt, um sich an die gewünschte Position zu bewegen.
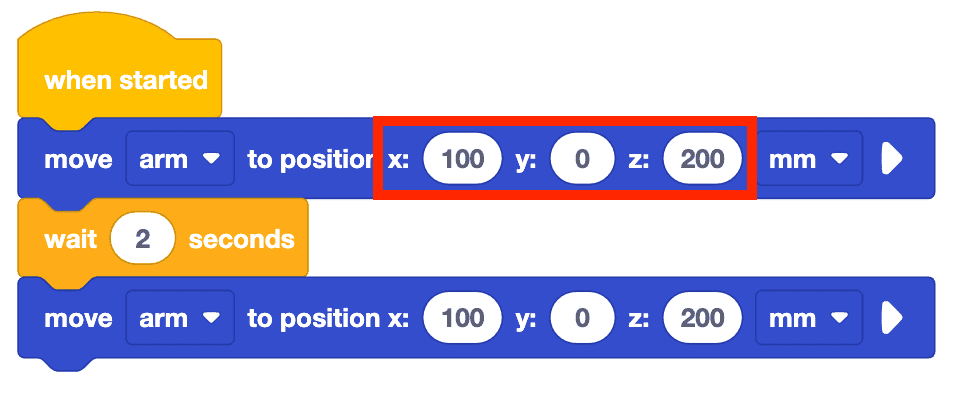
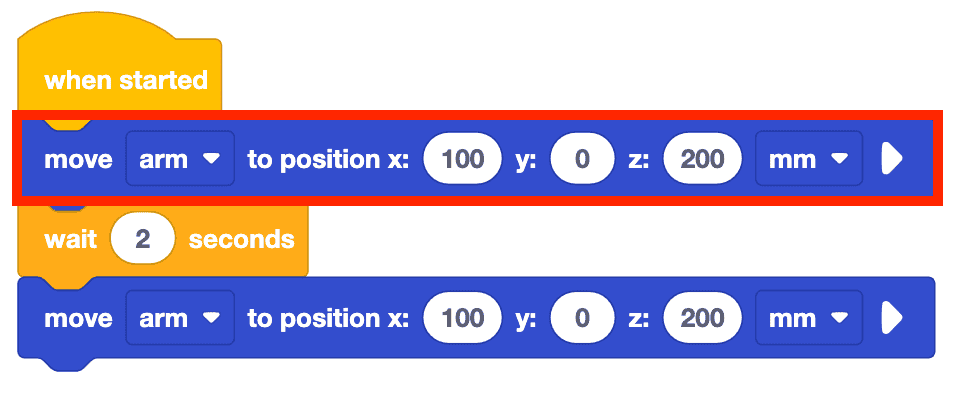
Ändern Sie den X-Wert im zweiten Punkt-Block und bewegen Sie ihn von 100 mm auf 250 mm zur Position.
Was wird der 6-Achsen-Arm Ihrer Meinung nach tun? Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.
Hinweis: Die y- und z-Werte werden hier nicht geändert, da das Ziel darin besteht, jeweils eine Achse zu ändern und zu beobachten. Wenn wir die Y- und Z-Werte gleich lassen, aber die X-Werte ändern, können wir sehen, wie sich der 6-Achsen-Arm entlang der X-Achse bewegt.
Benennen Sie das Projekt um und speichern Sie es auf Ihrem Gerät.
Stellen Sie sicher, dass der 6-Achsen-Arm mit VEXcode verbunden ist. Führen Sie das Projekt aus.
Beobachten Sie den 6-Achsen-Arm, während er sich entlang der X-Achse bewegt. Beachten Sie, dass der 6-Achsen-Arm zunächst in die sichere Position (120, 0, 100) fährt und dann das Projekt ausführt.
Stoppen Sie das Projekt, sobald der 6-Achsen-Arm zum Stillstand gekommen ist.
Notieren Sie Ihre Beobachtungen in Ihrem technischen Notizbuch. Wie bewegte sich der 6-Achsen-Arm in diesem Projekt? Ist es Ihrer Vorhersage ähnlich oder unterscheidet es sich davon? Warum?
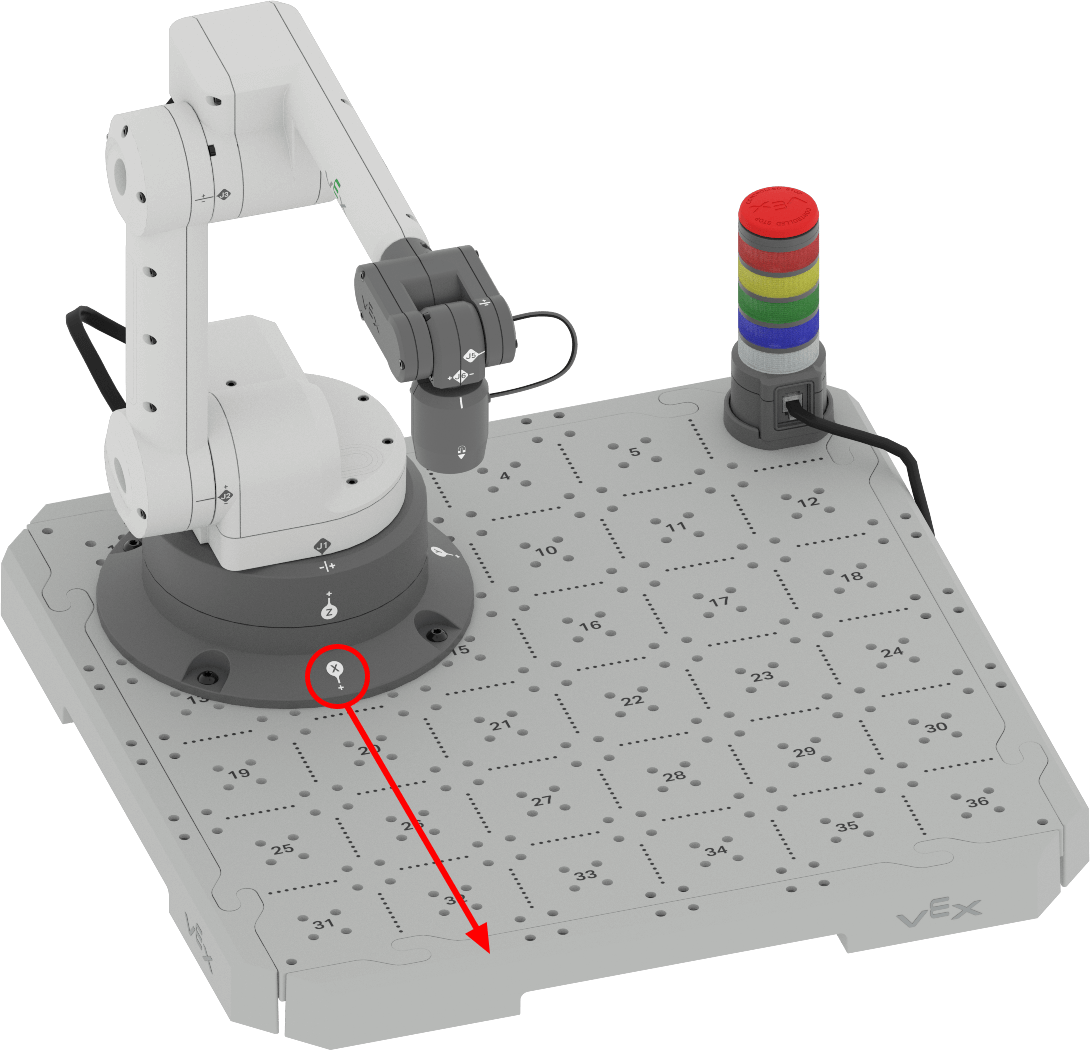
Beachten Sie, dass sich der 6-Achsen-Arm beim Ändern des X-Werts ein- und ausfährt, wenn er sich entlang der X-Achse ausdehnt. In dieser Animation erstreckt sich der 6-Achsen-Arm entlang der X-Achse nach vorne von der Basis weg und nach hinten auf sie zu.
Durchlaufen des Projekts
Nachdem Sie das Projekt nun mit der Schaltfläche „AUSFÜHREN“ ausgeführt haben, können Sie das Projekt auch mit der Schaltfläche „STEP“ ausführen. Mit der Step-Funktion wird ein Projekt Block für Block ausgeführt. Auf diese Weise können Sie deutlich erkennen, wie jeder Block im Projekt einem Roboterverhalten entspricht. Befolgen Sie die nachstehenden Schritte, um das Projekt schrittweise durchzuführen.
Drücken Sie die Taste STEP.
Der 6-Achsen-Arm bewegt sich in die sichere Position und dann wird der erste Block im Stapel, der mit verbunden ist, beim Start mit Block hervorgehoben. In diesem Projekt wird der Block Zu Position bewegen“ hervorgehoben, aber erst ausgeführt, wenn die Schaltfläche SCHRITT ein zweites Mal gedrückt wird, wie in diesem Video gezeigt.
Drücken Sie die Taste STEP ein zweites Mal, um den Block Zu Position bewegen“ auszuführen.
Sobald der Block ausgeführt wird, bewegt sich die Hervorhebung zum nächsten Block im Stapel, dem Block Warten , wie in diesem Video gezeigt.
12. Das Durchlaufen eines Projekts erfolgt nach einem Prozess – zuerst wird ein Block hervorgehoben, dann wird er ausgeführt. Wählen Sie weiterhin die Schaltfläche SCHRITT aus, um die verbleibenden Blöcke im Projekt nacheinander auszuführen, wie im Video unten gezeigt. Dies kann bei der Fehlerbehebung in einem Projekt sehr hilfreich sein, da Sie das Verhalten einzelner Roboter deutlicher erkennen können. Sehen Sie sich das Video unten an, um den Rest des mit der Step-Funktion ausgeführten Projekts zu sehen.
Aktivität
Nachdem Sie nun gelernt haben, wie Sie den 6-Achsen-Arm für die Bewegung entlang der X-Achse programmieren, können Sie diese Fähigkeiten nun in die Praxis umsetzen. In dieser Aktivität codieren Sie den 6-Achsen-Arm so, dass er sich entlang der X-Achse bewegt, um die minimalen und maximalen X-Werte zu ermitteln, zu denen sich der 6-Achsen-Arm bewegen kann.
- Machen Sie eine Vorhersage für die minimalen und maximalen x-Werte, die der 6-Achsen-Arm erreichen kann. Notieren Sie die vorhergesagten Werte in Ihrem technischen Notizbuch.
- Sie mit demselben Projekt wie oben die x-Werte in den Blöcken in Ihrer vorhergesagten Werte.
- Führen Sie Ihr Projekt aus, um Ihre Vorhersagen zu testen. Stellen Sie sicher, dass Ihr 6-Achsen-Arm mit VEXcode verbunden ist.
- Fahren Sie mit der Vorhersage und dem Testen verschiedener x-Werte fort. Denken Sie beim Testen Ihrer Projekte unbedingt daran, Ihre Vorhersagen und Ergebnisse in Ihrem technischen Notizbuch aufzuzeichnen. Welche minimalen und maximalen Werte finden Sie ?
- Vergleichen Sie Ihre Ergebnisse mit Werten anderer Gruppen. Sind sie ähnlich oder unterschiedlich? Welche Gruppe hat die größten und kleinsten Werte? Testen Sie diese Werte und passen Sie Ihre Ergebnisse bei Bedarf an.
Überprüfen Sie Ihr Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte dieser Lektion verstanden haben, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum „Überprüfen Sie Ihr Verständnis“ > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > um die Mid-Unit-Reflexion abzuschließen.