
Les 3: Autonome beweging langs de X-as
In de vorige les hebt u de basisbeginselen van computerwetenschappen geleerd, zoals wat een programmeertaal is, wat robotgedrag is en hoe u het gedrag van robots kunt aanpassen. Vervolgens heb je deze vaardigheden toegepast door de gedragingen van de 6-assige robotarm te identificeren.
In deze les leert u hoe u de 6-assige arm programmeert zodat deze langs de x-as beweegt.
Aan het einde van deze les programmeert u de 6-assige arm zodanig dat deze langs de x-as beweegt om de minimale en maximale x-waarde te vinden waarnaar de 6-assige arm kan bewegen.
Coderen van de 6-assige arm langs de X-as
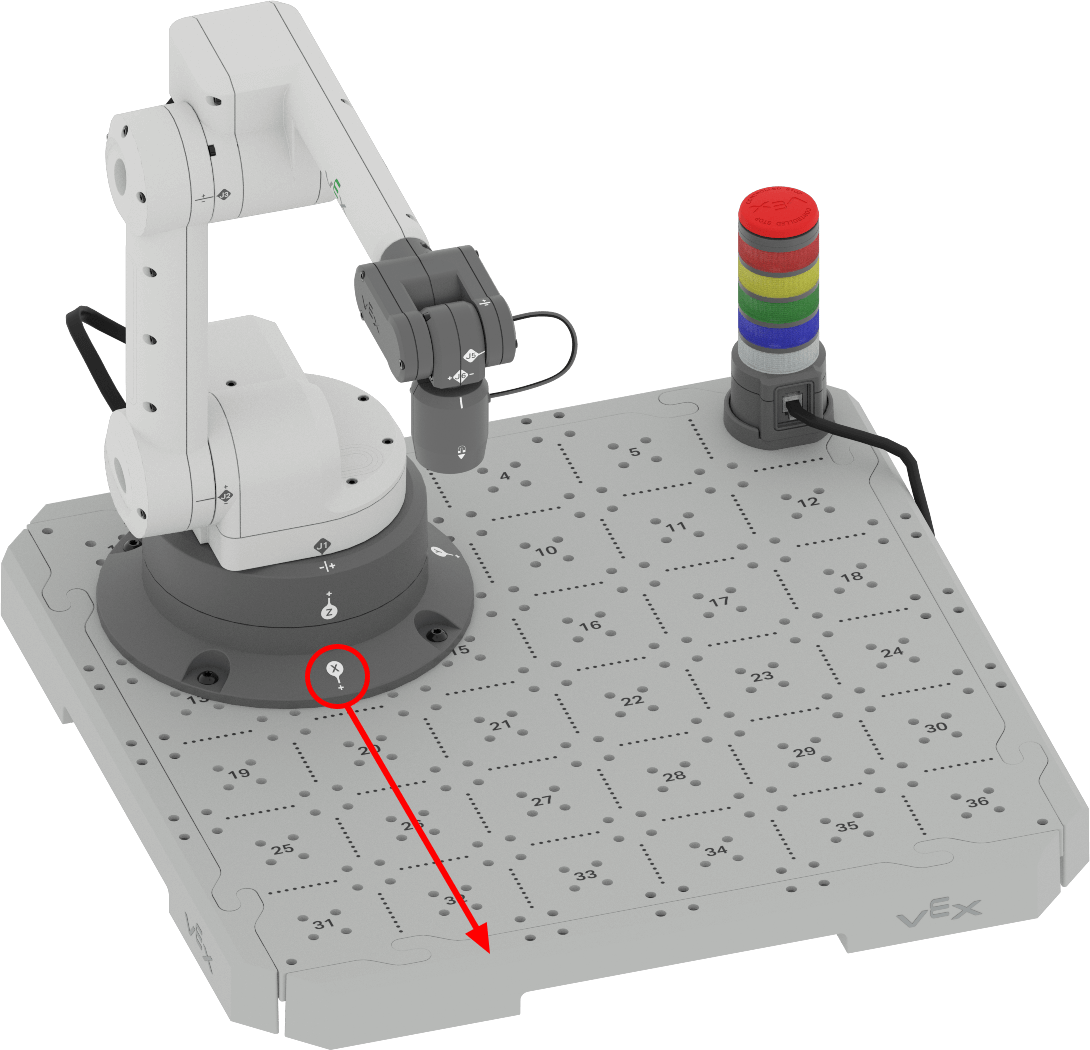
U kunt de informatie over coördinaten en de manier waarop de 6-assige arm in 3D-ruimte beweegt, gebruiken om de 6-assige arm te coderen, zodat deze autonoom langs de x-as beweegt. Volg de onderstaande stappen om de 6-assige arm te coderen zodat deze langs de x-as beweegt.
Open in VEXcode een New Blocks Project.
Volg de stappen in de video om een nieuw project te openen.
Selecteer de optieBestandin de werkbalk om het menu Bestand te openen en selecteer vervolgensNieuw blokkenproject.Er verschijnt een pop-upvenster met de optie EXP Brain of 6-Axis Arm. Selecteer6-assige arm. Vervolgens wordt het nieuwe project geopend.
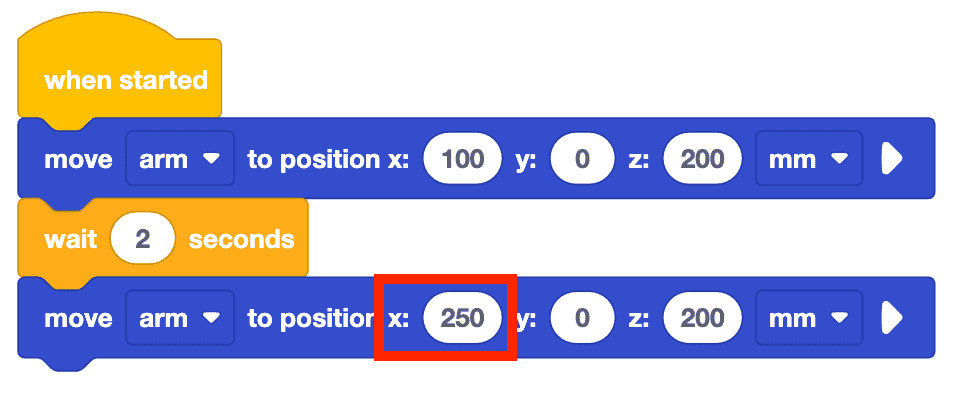
Maak het hier getoonde project opnieuw door blokken naar de werkruimte te slepen en ze te koppelen zoals weergegeven.
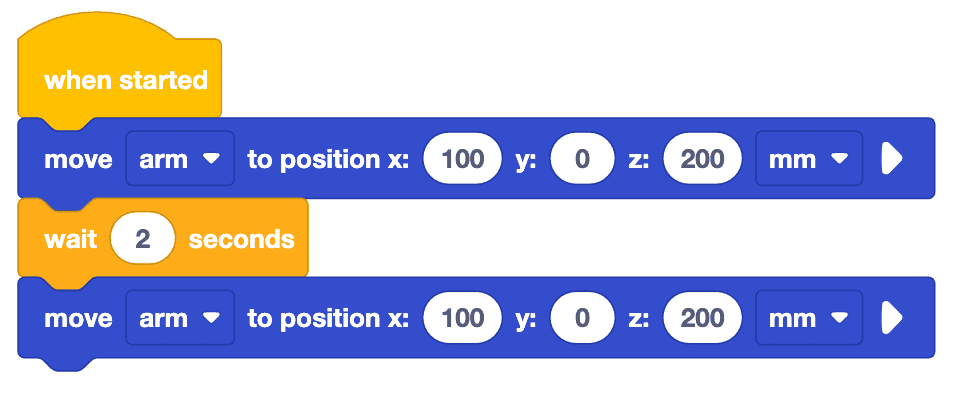
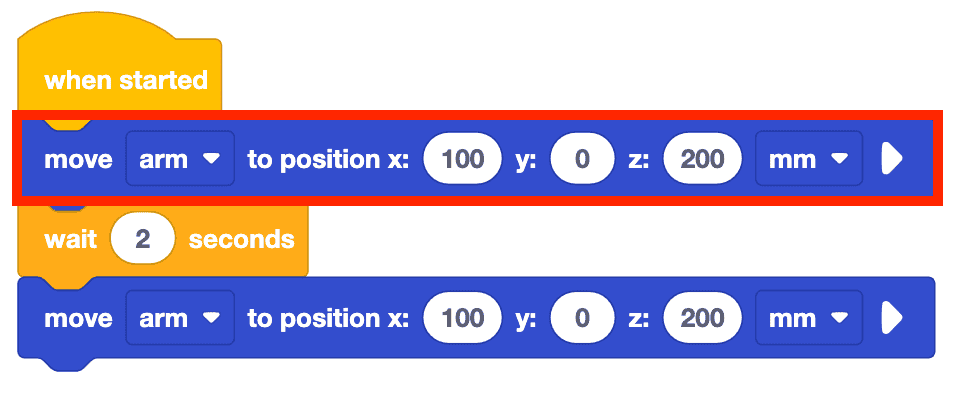
Bij dit project wordt het blok Verplaats naar positie gebruikt om het uiteinde van de 6-assige arm in de ruimte te verplaatsen. Dit blok bevat ruimte voor de invoer van x-, y- en z-coördinaten. Dit blok wordt in deze les gebruikt om de 6-assige arm naar een nieuwe coördinaat te verplaatsen.
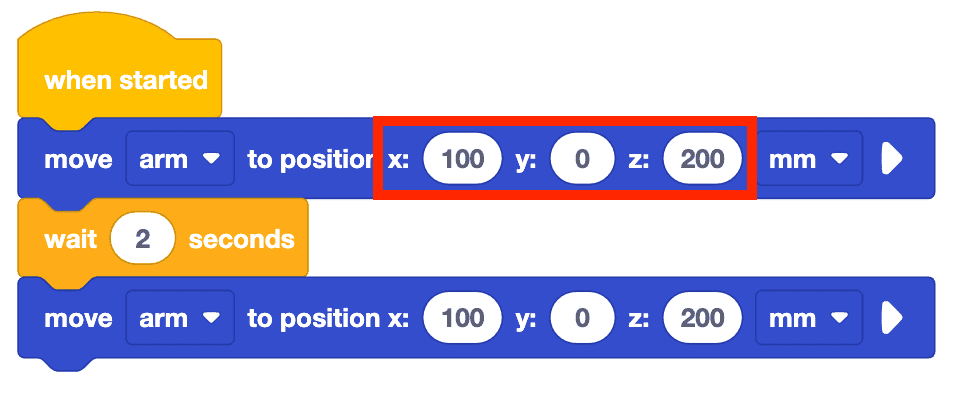
Merk op dat dit blok de volledige coördinaatwaarden bevat (100, 0, 200). Bedenk dat de 6-assige arm een waarde voor elke as nodig heeft om naar de gewenste locatie te kunnen bewegen.
Wijzig de x-waarde in het tweede Verplaats naar positie blok van 100 mm naar 250 mm.
Wat denk je dat dit met de 6-assige arm zal doen? Noteer uw voorspelling in uw technisch notitieboekje.
Opmerking: De y- en z-waarden worden hier niet gewijzigd, omdat het de bedoeling is om telkens één as te wijzigen en te observeren. Door de y- en z-waarden gelijk te houden, maar de x-waarden te veranderen, kunnen we zien hoe de 6-assige arm langs de x-as beweegt.
Geef het project een nieuwe naam en sla het op uw apparaat op.
Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Voer het project uit.
Observeer de 6-assige arm terwijl deze langs de x-as beweegt. Merk op dat de 6-assige arm eerst naar de veilige positie (120, 0, 100) beweegt en vervolgens het project uitvoert.
Stop het project zodra de 6-assige arm niet meer beweegt.
Noteer uw observaties in uw technisch notitieboekje. Hoe bewoog de 6-assige arm in dit project? Is het vergelijkbaar of anders met uw voorspelling? Waarom?
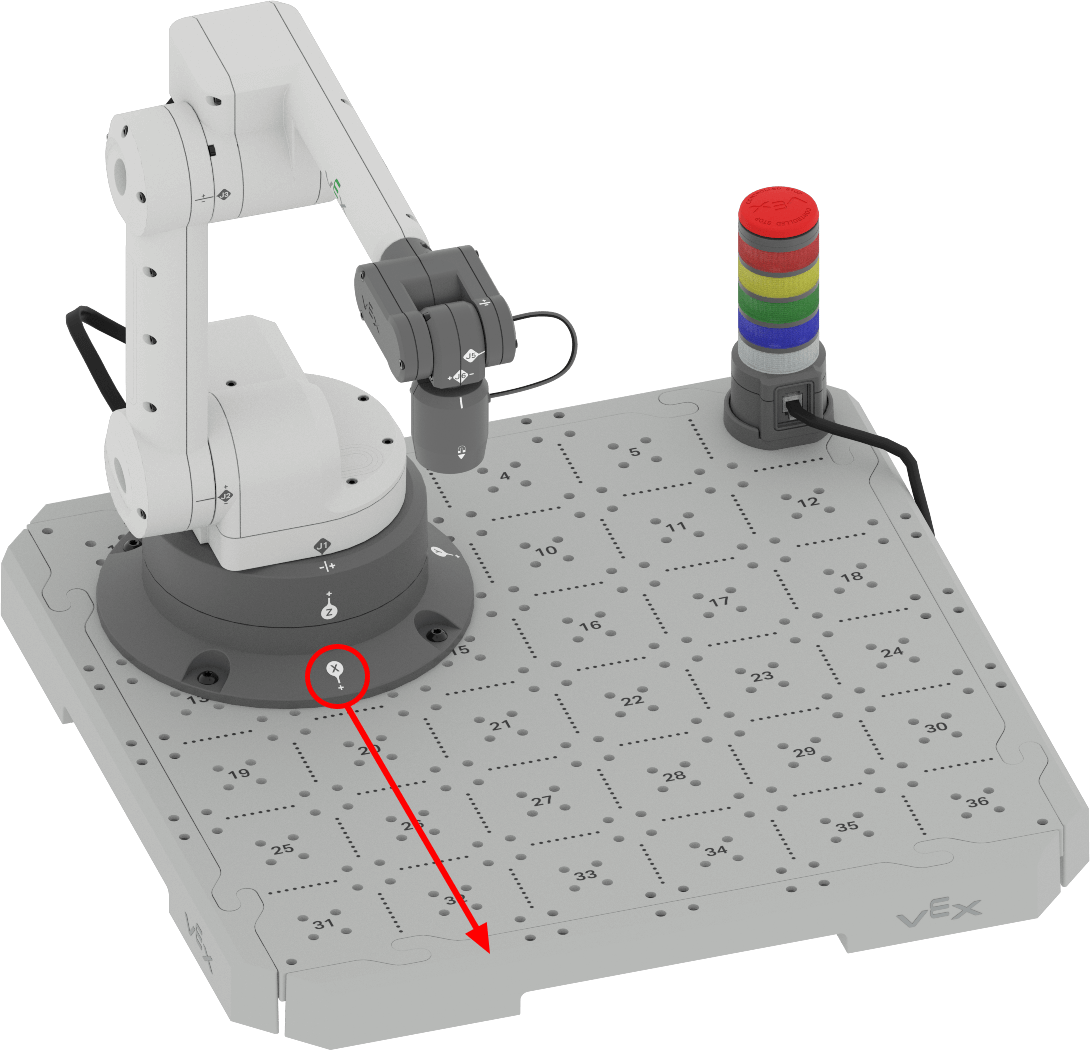
Merk op dat wanneer de x-waarde wordt gewijzigd, de 6-assige arm zich intrekt en uitschuift langs de x-as. In deze animatie wordt de 6-assige arm naar voren, weg van de basis, en naar achteren, langs de x-as, uitgeschoven.
Stap voor stap door het project
Nu u het project hebt uitgevoerd met de knop 'UITVOEREN', kunt u het project ook uitvoeren met de knop 'STAP'. Met de functie Stap voert u een project blok voor blok uit. Hiermee kunt u duidelijk zien hoe elk blok in het project overeenkomt met het gedrag van een robot. Volg de onderstaande stappen om door het project te stappen.
Druk op de knop STEP.
De 6-assige arm beweegt naar de veilige positie, waarna het eerste blok in de stapel, verbonden met de wordt gemarkeerd. Wanneer gestart, wordt blok gemarkeerd. In dit project wordt het blok Verplaats naar positie gemarkeerd, maar pas uitgevoerd nadat u voor de tweede keer op de knop STEP hebt gedrukt, zoals getoond in deze video.
Druk een tweede keer op de knop STEP om het blok Verplaats naar positie uit te voeren.
Zodra het blok is uitgevoerd, wordt de markering verplaatst naar het volgende blok in de stapel, het blok Wait, zoals in deze video wordt getoond.
12. Het doorlopen van een project verloopt volgens een proces: eerst wordt een blok gemarkeerd en vervolgens uitgevoerd. Blijf de knop STEP selecteren om de resterende blokken in het project één voor één uit te voeren, zoals in de onderstaande video wordt getoond. Dit kan erg handig zijn bij het oplossen van problemen met een project, omdat u het gedrag van de afzonderlijke robots duidelijker kunt bekijken. Bekijk de video hieronder om te zien hoe de rest van het project is uitgevoerd met de Step-functie.
Activiteit
Nu u hebt geleerd hoe u de 6-assige arm kunt programmeren om langs de x-as te bewegen, gaat u deze vaardigheden oefenen. In deze activiteit programmeert u de 6-assige arm zodat deze langs de x-as beweegt om de minimale en maximale x-waarden te vinden waarnaar de 6-assige arm kan bewegen.
- Doe een voorspelling voor de minimale en maximale x-waarden waarnaar de 6-assige arm kan bewegen. Noteer de voorspelde waarden in uw technisch notitieboekje.
- Wijzig, met behulp van hetzelfde project als hierboven, de x-waarden in de blokken Verplaats naar positienaar uw voorspelde waarden.
- Voer uw project uit om uw voorspellingen te testen. Zorg ervoor dat uw 6-assige arm is aangesloten op VEXcode.
- Blijf verschillende x-waarden voorspellen en testen. Zorg ervoor dat u uw voorspellingen en resultaten vastlegt in uw technische notitieboekje wanneer u uw projecten test. Welke minimum- en maximumwaarden vindt u?
- Vergelijk uw resultaten met de waarden van andere groepen. Zijn ze vergelijkbaar of verschillend? Welke groep heeft de grootste en kleinste waarden? Test deze waarden en pas uw resultaten indien nodig aan.
Controleer uw begrip
Voordat u met de volgende les begint, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om de Mid-Unit Reflection te voltooien.