
Bài 3: Chuyển động tự chủ dọc theo trục X
Trong Bài học trước, bạn đã tìm hiểu về những kiến thức cơ bản về khoa học máy tính, bao gồm ngôn ngữ lập trình là gì, hành vi của robot là gì và cách điều chỉnh hành vi của robot. Sau đó, bạn áp dụng những kỹ năng này bằng cách xác định hành vi của Cánh tay rô-bốt 6 trục.
Trong Bài học này, bạn sẽ học cách lập trình cho Cánh tay 6 trục để di chuyển dọc theo trục x.
Vào cuối Bài học này, bạn sẽ lập trình cho Cánh tay 6 trục di chuyển dọc theo trục x để tìm giá trị x nhỏ nhất và lớn nhất mà Cánh tay 6 trục có thể di chuyển tới.
Mã hóa cánh tay 6 trục dọc theo trục X
Bạn có thể sử dụng thông tin về tọa độ và cách Cánh tay 6 trục di chuyển trong không gian 3D để lập trình cho Cánh tay 6 trục di chuyển tự động dọc theo trục x. Thực hiện theo các bước dưới đây để lập trình cho Cánh tay 6 trục di chuyển dọc theo trục x.
Trong VEXcode, mở Dự án Khối mới
Làm theo các bước trong video để mở một dự án mới.
Chọn tùy chọnTệptrên Thanh công cụ để mở menu Tệp, sau đó chọnDự án khối mới.Một cửa sổ bật lên xuất hiện với tùy chọn cho EXP Brain hoặc 6-Axis Arm. ChọnCánh tay 6 trục. Sau đó, dự án mới sẽ được mở.
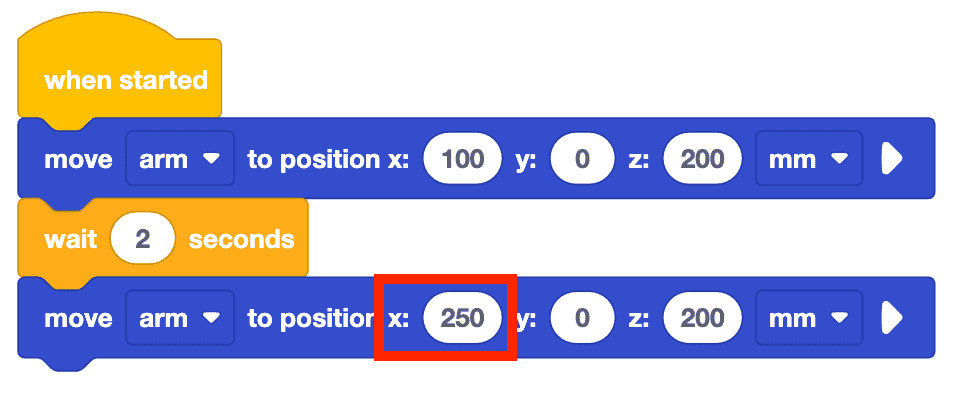
Tạo lại dự án được hiển thị ở đây bằng cách kéo các khối vào Không gian làm việc và gắn chúng như minh họa.
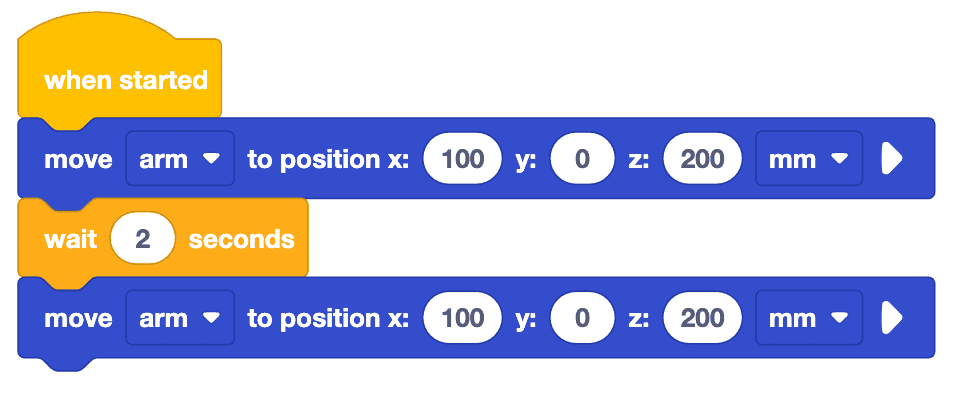
Dự án này sử dụng khối Di chuyển đến vị trí để di chuyển đầu của Cánh tay 6 trục trong không gian. Khối này có các khoảng trống để nhập giá trị tọa độ x, y và z. Khối này sẽ được sử dụng trong suốt Bài học này để di chuyển Cánh tay 6 trục đến tọa độ mới.
Lưu ý rằng khối này bao gồm đầy đủ các giá trị tọa độ (100, 0, 200). Hãy nhớ rằng Cánh tay 6 trục yêu cầu giá trị cho mỗi trục để di chuyển đến vị trí mong muốn.
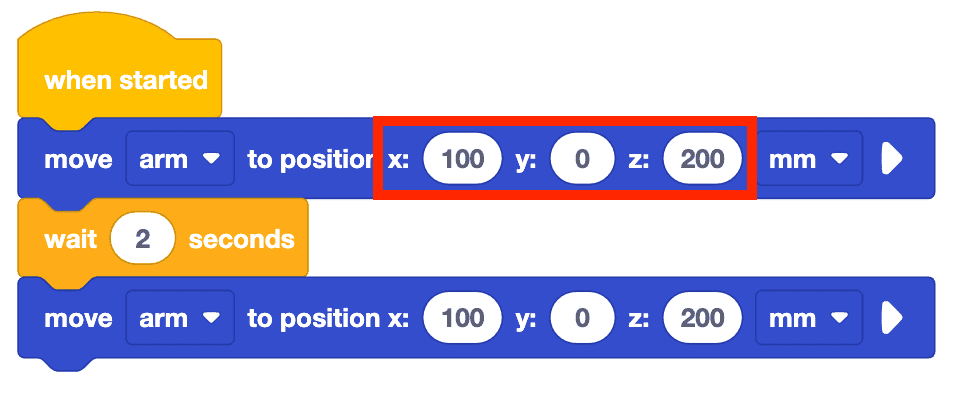
Thay đổi giá trị x trong khối thứ hai Di chuyển đến vị trí từ 100mm đến 250mm.
Bạn nghĩ điều này sẽ khiến cánh tay 6 trục làm gì? Ghi lại dự đoán của bạn vào sổ tay kỹ thuật.
Lưu ý: Giá trị y và z không thay đổi ở đây vì mục tiêu là thay đổi và quan sát từng trục một. Giữ nguyên giá trị y và z nhưng thay đổi giá trị x cho phép chúng ta thấy cánh tay 6 trục sẽ di chuyển dọc theo trục x như thế nào.
Đổi tên dự án và lưu vào thiết bị của bạn.
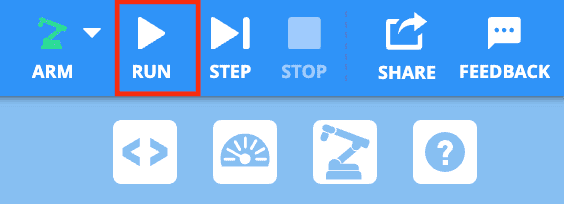
Đảm bảo rằng Tay 6 trục được kết nối với VEXcode. Chạy dự án.
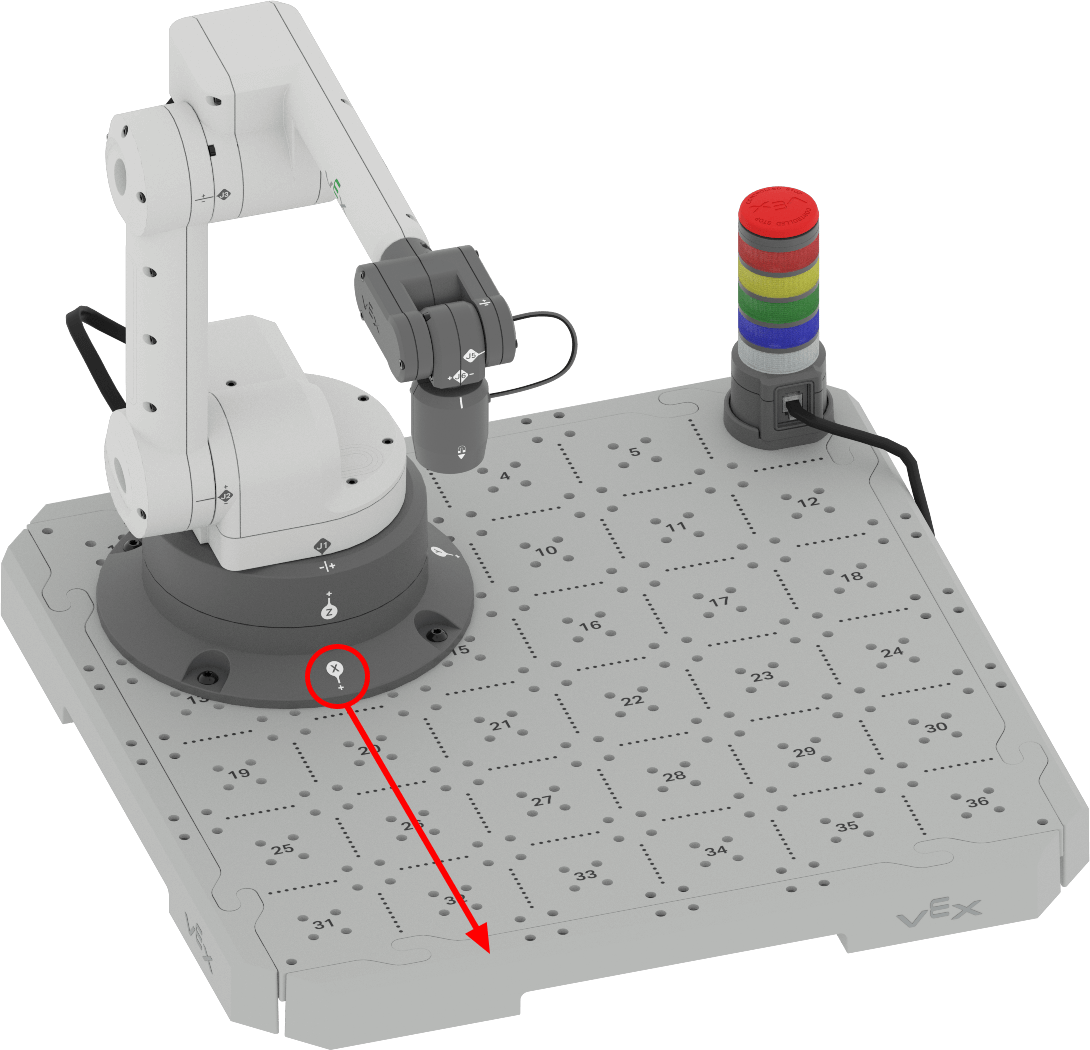
Quan sát cánh tay 6 trục khi nó di chuyển dọc theo trục x. Lưu ý rằng Cánh tay 6 trục sẽ bắt đầu bằng cách di chuyển đến Vị trí an toàn (120, 0, 100), sau đó sẽ thực hiện dự án.
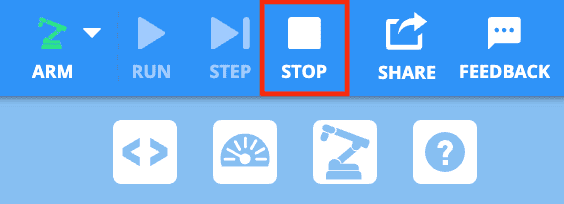
Dừng dự án khi Cánh tay 6 trục dừng chuyển động.
Ghi lại những quan sát của bạn vào sổ tay kỹ thuật. Cánh tay 6 trục di chuyển như thế nào trong dự án này? Nó giống hay khác với dự đoán của bạn? Tại sao?
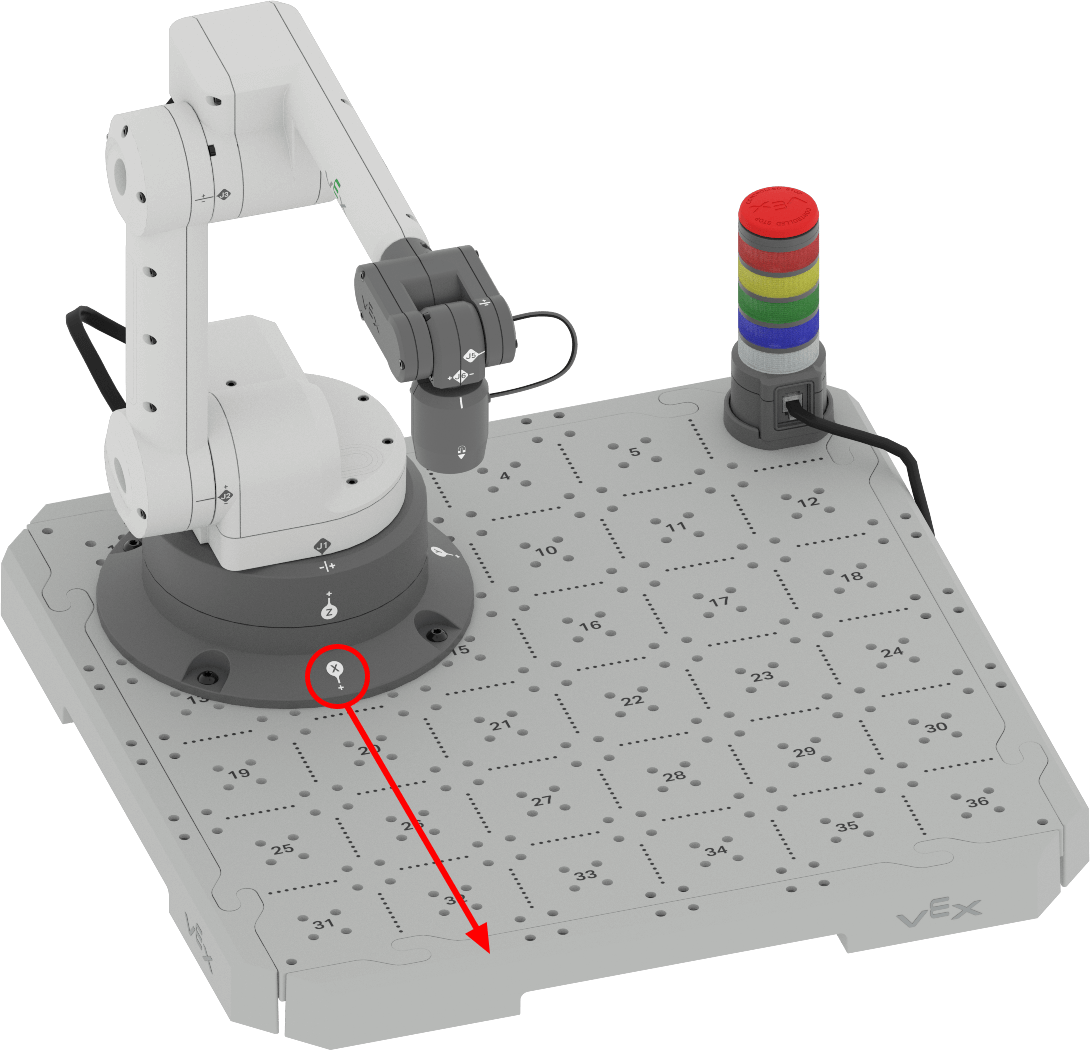
Lưu ý rằng khi giá trị x thay đổi, Cánh tay 6 trục sẽ thu lại và kéo dài dọc theo trục x. Trong hình ảnh động này, Cánh tay 6 trục sẽ mở rộng về phía trước ra khỏi đế và về phía sau hướng về phía đế, dọc theo trục x.
Bước qua dự án
Bây giờ bạn đã chạy dự án bằng nút 'RUN', bạn cũng có thể thực hiện dự án bằng nút 'STEP'. Tính năng Step thực hiện dự án theo từng khối một. Điều này cho phép bạn thấy rõ từng khối trong dự án tương ứng với hành vi của robot như thế nào. Thực hiện theo các bước dưới đây để thực hiện dự án.
Nhấn nút STEP.
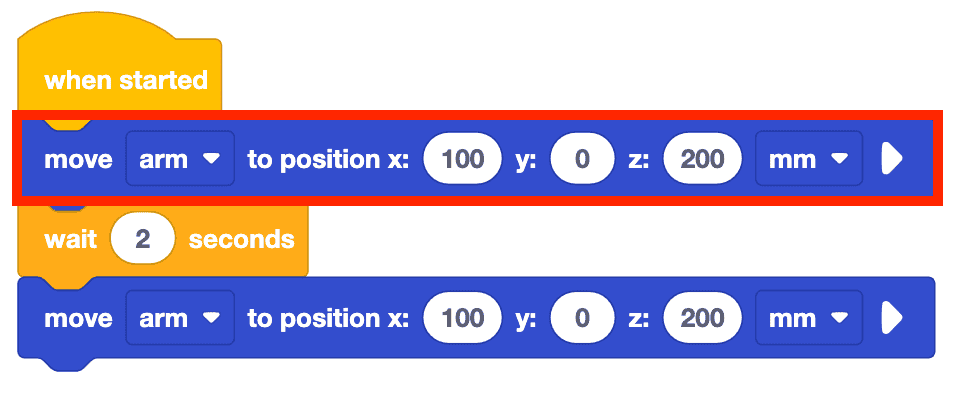
Cánh tay 6 trục sẽ di chuyển đến Vị trí an toàn, sau đó khối đầu tiên trong ngăn xếp được kết nối với khối khi bắt đầu sẽ sáng lên. Trong dự án này, khối Di chuyển đến vị trí sẽ được tô sáng nhưng không thực hiện cho đến khi nút BƯỚC được nhấn lần thứ hai như trong video này.
Nhấn nút STEP lần thứ hai để chạy khối Di chuyển đến vị trí.
Khi khối chạy xong, điểm nổi bật sẽ di chuyển đến khối tiếp theo trong ngăn xếp, khối Wait, như được hiển thị trong video này.
12. Việc thực hiện một dự án tuân theo một quy trình – trước tiên một khối được đánh dấu, sau đó khối đó được thực thi. Tiếp tục chọn nút STEP để thực hiện các khối còn lại trong dự án từng khối một, như được hiển thị trong video bên dưới. Điều này có thể rất hữu ích khi cố gắng khắc phục sự cố của một dự án vì bạn có thể xem rõ hơn hành vi của từng robot. Xem video bên dưới để biết phần còn lại của dự án được thực hiện bằng tính năng Step.
Hoạt động
Bây giờ bạn đã học cách lập trình cho Cánh tay 6 trục để di chuyển dọc theo trục x, bạn sẽ thực hành các kỹ năng này. Trong hoạt động này, bạn sẽ mã hóa Cánh tay 6 trục để di chuyển dọc theo trục x nhằm tìm giá trị x nhỏ nhất và lớn nhất mà Cánh tay 6 trục có thể di chuyển tới.
- Đưa ra dự đoán về giá trị x tối thiểu và tối đa mà Cánh tay 6 trục có thể di chuyển tới. Ghi lại các giá trị dự đoán vào sổ tay kỹ thuật của bạn.
- Sử dụng cùng một dự án ở trên, hãy thay đổi các giá trị x trong các Di chuyển đến vị tríthành các giá trị dự đoán của bạn.
- Chạy dự án để kiểm tra dự đoán của bạn. Đảm bảo Tay 6 trục của bạn được kết nối với VEXcode.
- Tiếp tục dự đoán và kiểm tra các giá trị x khác nhau. Hãy chắc chắn ghi lại dự đoán và kết quả của bạn vào sổ tay kỹ thuật khi thử nghiệm các dự án. Bạn tìm được giá trị tối thiểu và tối đa nào?
- So sánh kết quả của bạn với giá trị của các nhóm khác. Chúng giống nhau hay khác nhau? Nhóm nào có giá trị lớn nhất và nhỏ nhất? Kiểm tra các giá trị đó và điều chỉnh kết quả nếu cần.
Kiểm tra sự hiểu biết của bạn
Trước khi bắt đầu Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm trong Bài học này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
Chọn Tiếp theo > để hoàn thành Phản ánh giữa bài.