
पाठ 3: X-अक्ष के अनुदिश स्वायत्त गति
पिछले पाठ में, आपने कंप्यूटर विज्ञान के मूल सिद्धांतों के बारे में सीखा, जिसमें प्रोग्रामिंग भाषा क्या है, रोबोट का व्यवहार क्या है, और रोबोट के व्यवहार को कैसे संशोधित किया जाए, आदि शामिल थे। फिर आपने 6-अक्ष रोबोटिक भुजा के व्यवहार की पहचान करके इन कौशलों को लागू किया।
इस पाठ में, आप सीखेंगे कि 6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कैसे कोडित किया जाए।
इस पाठ के अंत में, आप 6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कोड करेंगे, ताकि 6-अक्ष भुजा के लिए न्यूनतम और अधिकतम x-मान ज्ञात किया जा सके।
X-अक्ष के साथ 6-अक्ष भुजा को कोड करना
आप निर्देशांकों और 6-अक्ष भुजा के 3D अंतरिक्ष में गति करने के तरीके के बारे में जानकारी का उपयोग करके 6-अक्ष भुजा को x-अक्ष के साथ स्वायत्त रूप से गति करने के लिए कोड कर सकते हैं। 6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कोड करने हेतु नीचे दिए गए चरणों का पालन करें।
VEXcode में, नया ब्लॉक प्रोजेक्ट खोलें।
नया प्रोजेक्ट खोलने के लिए वीडियो में दिए गए चरणों का पालन करें।
फ़ाइल मेनू खोलने के लिए टूलबार मेंफ़ाइलविकल्प का चयन करें, फिरनए ब्लॉक प्रोजेक्ट का चयन करें।EXP ब्रेन या 6-एक्सिस आर्म के विकल्प के साथ एक पॉप अप विंडो दिखाई देती है। 6-अक्ष आर्मका चयन करें. इसके बाद नई परियोजना खोली जाती है।
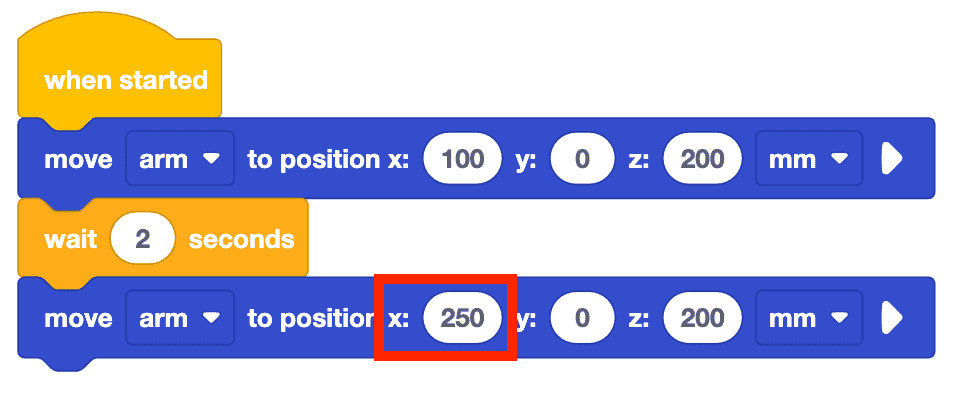
ब्लॉकों को कार्यक्षेत्र में खींचकर और उन्हें दिखाए अनुसार संलग्न करके यहां दिखाए गए प्रोजेक्ट को पुनः बनाएं।
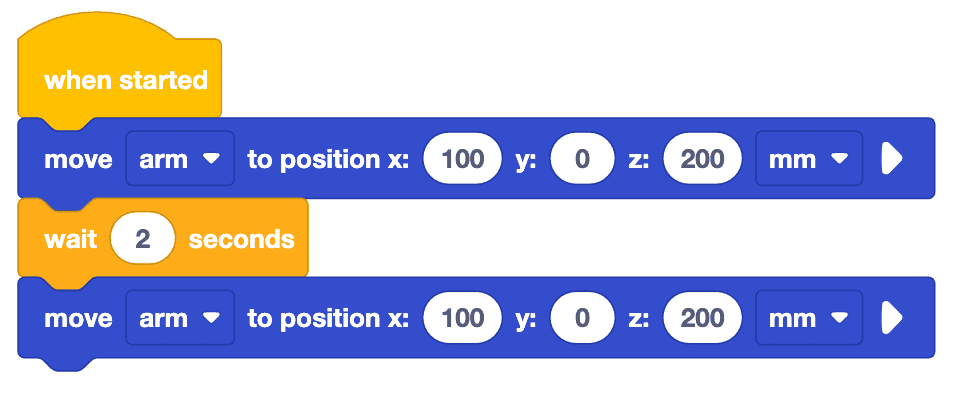
यह परियोजना अंतरिक्ष में 6-अक्ष भुजा के अंत को स्थानांतरित करने के लिए मूव टू पोजीशन ब्लॉक का उपयोग करती है। इस ब्लॉक में x, y, और z निर्देशांक मानों को इनपुट करने के लिए स्थान हैं। इस ब्लॉक का उपयोग इस पाठ में 6-अक्ष भुजा को एक नए निर्देशांक पर ले जाने के लिए किया जाएगा।
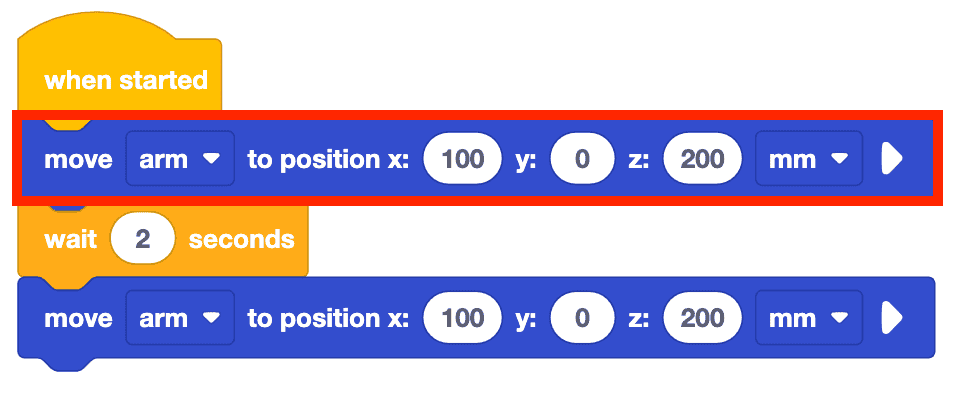
ध्यान दें कि इस ब्लॉक में पूर्ण निर्देशांक मान (100, 0, 200) शामिल हैं। याद रखें कि 6-अक्ष भुजा को वांछित स्थान पर जाने के लिए प्रत्येक अक्ष के लिए एक मान की आवश्यकता होती है।
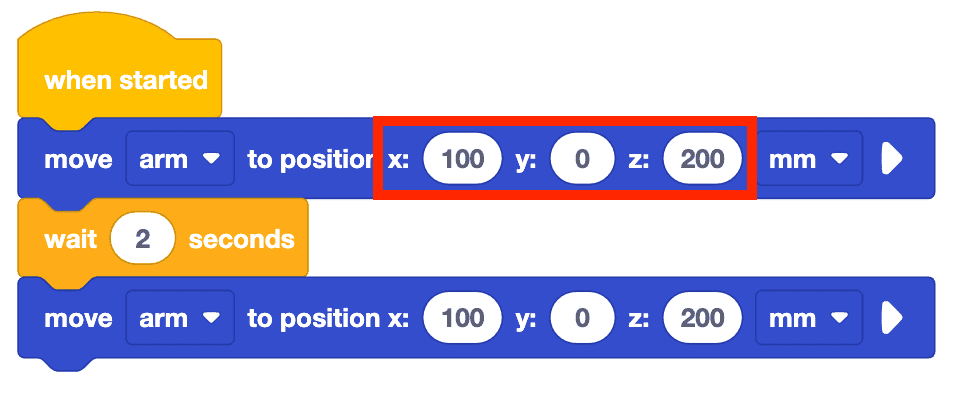
दूसरे में x-मान बदलें ब्लॉक को 100 मिमी से 250 मिमी तक ले जाएं।
आपको क्या लगता है कि इससे 6-अक्ष भुजा क्या करेगी? अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें।
नोट: यहाँ y और z-मान नहीं बदले गए हैं क्योंकि लक्ष्य एक समय में एक अक्ष को बदलना और उसका निरीक्षण करना है। y और z-मानों को समान रखते हुए, लेकिन x-मानों को बदलने से हमें यह देखने की अनुमति मिलती है कि 6-अक्ष भुजा x-अक्ष के साथ कैसे चलेगी।
प्रोजेक्ट का नाम बदलें और उसे अपने डिवाइस पर सेव करें.
सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है। परियोजना चलाएँ.
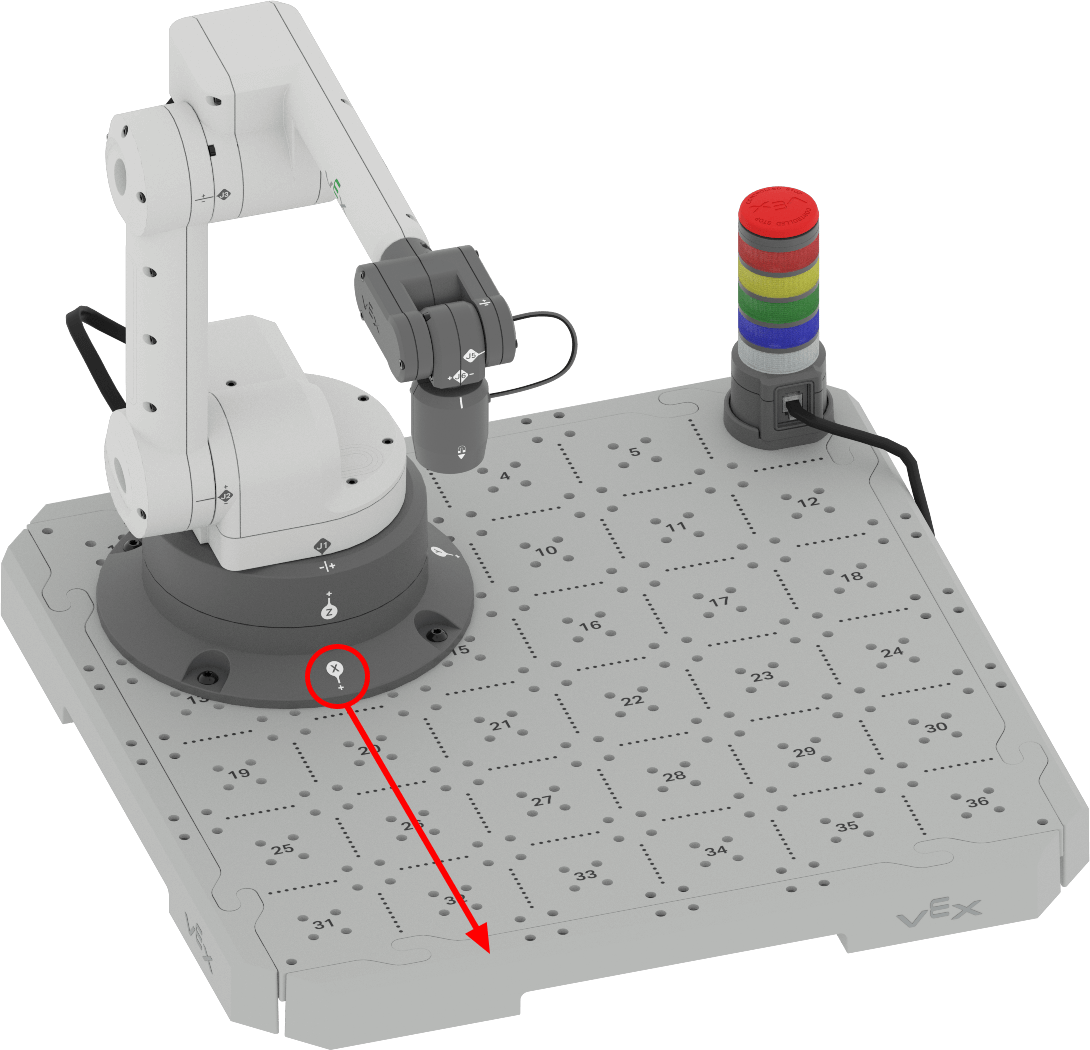
6-अक्ष भुजा को x-अक्ष के साथ चलते हुए देखें। ध्यान दें कि 6-अक्षीय भुजा सुरक्षित स्थिति (120, 0, 100) पर जाकर शुरू होगी, फिर परियोजना को निष्पादित करेगी।
जब 6-अक्ष भुजा चलना बंद कर दे तो परियोजना को रोक दें।
अपने अवलोकनों को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। इस परियोजना में 6-अक्ष भुजा किस प्रकार चली? क्या यह आपकी भविष्यवाणी के समान है या भिन्न है? क्यों?
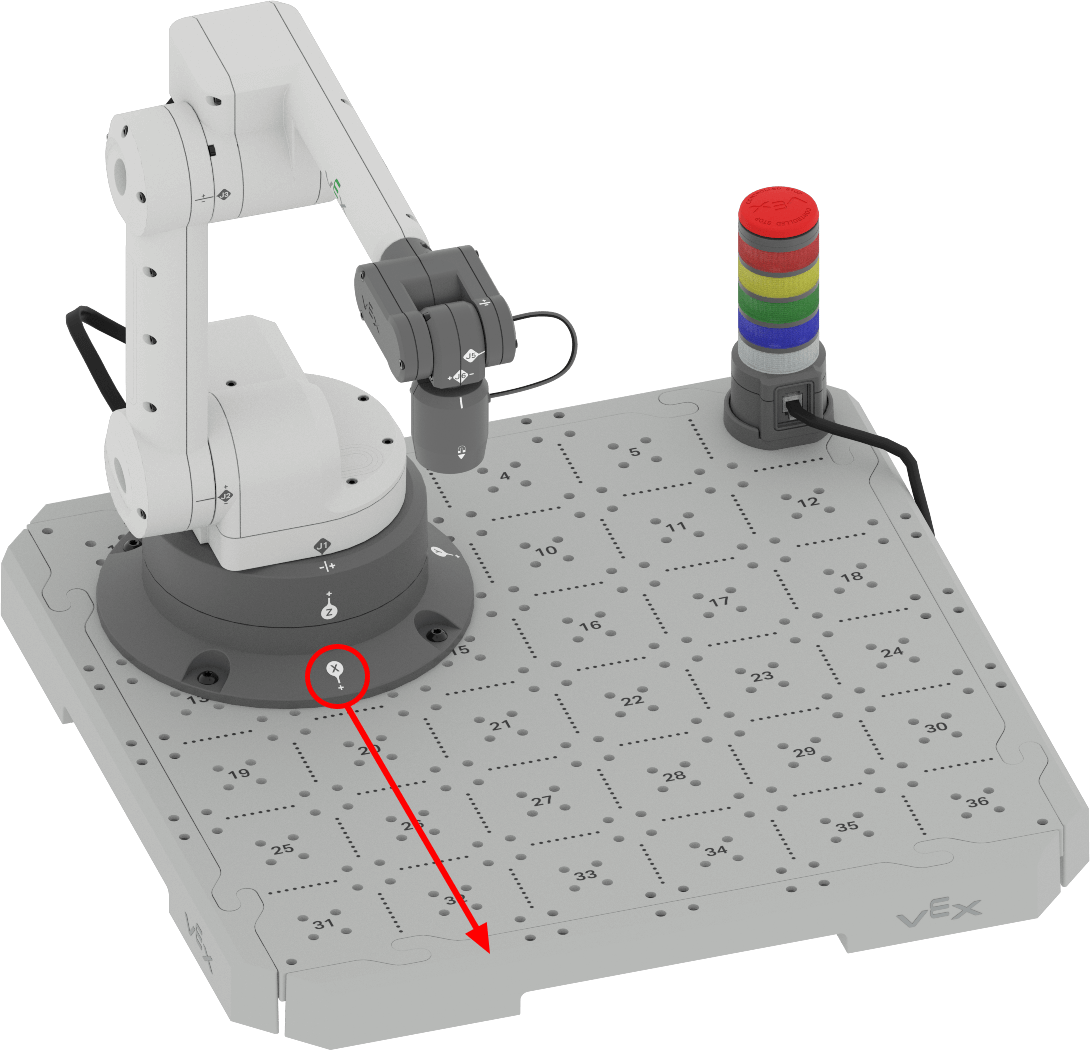
ध्यान दें कि जब x-मान परिवर्तित होता है तो 6-अक्ष भुजा पीछे हट जाती है और x-अक्ष के साथ विस्तारित हो जाती है। इस एनीमेशन में, 6-अक्ष भुजा आधार से दूर आगे की ओर, तथा x-अक्ष के साथ पीछे की ओर बढ़ती है।
परियोजना के माध्यम से आगे बढ़ना
अब जबकि आपने 'RUN' बटन के साथ प्रोजेक्ट चलाया है, तो आप 'STEP' बटन का उपयोग करके भी प्रोजेक्ट को निष्पादित कर सकते हैं। स्टेप सुविधा एक समय में एक ब्लॉक पर प्रोजेक्ट निष्पादित करती है। इससे आप स्पष्ट रूप से देख सकेंगे कि परियोजना में प्रत्येक ब्लॉक रोबोट के व्यवहार से किस प्रकार मेल खाता है। परियोजना को आगे बढ़ाने के लिए नीचे दिए गए चरणों का पालन करें।
चरण बटन दबाएँ.
6-अक्षीय भुजा सुरक्षित स्थिति में चली जाएगी, फिर से जुड़ा स्टैक में पहला ब्लॉक ब्लॉक हाइलाइट हो जाएगा। इस परियोजना में, स्थिति पर ले जाएँ ब्लॉक हाइलाइट हो जाएगा, लेकिन तब तक निष्पादित नहीं होगा जब तक कि चरण बटन को दूसरी बार दबाया न जाए जैसा कि इस वीडियो में दिखाया गया है।
स्थिति ब्लॉक पर जाने के लिए STEP बटन को दूसरी बार दबाएँ।
एक बार ब्लॉक चलने के बाद, हाइलाइट स्टैक में अगले ब्लॉक, Waitब्लॉक पर चला जाएगा, जैसा कि इस वीडियो में दिखाया गया है।
12. किसी परियोजना में आगे बढ़ने के लिए एक प्रक्रिया का पालन किया जाता है - पहले एक ब्लॉक को हाइलाइट किया जाता है, फिर उसे निष्पादित किया जाता है। प्रोजेक्ट में शेष ब्लॉकों को एक-एक करके निष्पादित करने के लिए STEP बटन का चयन जारी रखें, जैसा कि नीचे दिए गए वीडियो में दिखाया गया है। किसी परियोजना का समस्या निवारण करते समय यह बहुत उपयोगी हो सकता है, क्योंकि आप अलग-अलग रोबोट के व्यवहार को अधिक स्पष्ट रूप से देख सकते हैं। स्टेप सुविधा के साथ निष्पादित परियोजना के शेष भाग को देखने के लिए नीचे दिया गया वीडियो देखें।
गतिविधि
अब जब आपने सीख लिया है कि 6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कैसे कोड किया जाए, तो आप इन कौशलों का अभ्यास करेंगे। इस गतिविधि में, आप 6-अक्ष भुजा को x-अक्ष के साथ गति करने के लिए कोड करेंगे, ताकि 6-अक्ष भुजा के लिए न्यूनतम और अधिकतम x-मान ज्ञात किए जा सकें।
- न्यूनतम और अधिकतम x-मानों के लिए पूर्वानुमान लगाएं, जिन तक 6-अक्ष भुजा जा सकती है। अपने इंजीनियरिंग नोटबुक में अनुमानित मानों को रिकॉर्ड करें।
- ऊपर दिए गए समान प्रोजेक्ट का उपयोग करते हुए, स्थितिब्लॉक में x-मानों को अपने पूर्वानुमानित मानों में बदलें।
- अपनी भविष्यवाणियों का परीक्षण करने के लिए अपना प्रोजेक्ट चलाएँ। सुनिश्चित करें कि आपका 6-एक्सिस आर्म VEXcode से जुड़ा हुआ है।
- विभिन्न x-मानों का पूर्वानुमान और परीक्षण जारी रखें। अपनी परियोजनाओं का परीक्षण करते समय अपनी भविष्यवाणियों और परिणामों को अपनी इंजीनियरिंग नोटबुक में अवश्य दर्ज करें। आपको न्यूनतम और अधिकतम मान क्या मिलते हैं?
- अपने परिणामों की तुलना अन्य समूहों के मूल्यों से करें। क्या वे समान हैं या भिन्न हैं? किस समूह का मान सबसे बड़ा और सबसे छोटा है? उन मानों का परीक्षण करें और यदि आवश्यक हो तो अपने परिणामों को समायोजित करें।
अपनी समझ की जाँच करें
अगला पाठ शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
मध्य-इकाई प्रतिबिंबन को पूरा करने के लिए अगला > चयन करें।