
บทที่ 3: การเคลื่อนที่อัตโนมัติตามแกน X
ในบทเรียนก่อนหน้านี้ คุณได้เรียนรู้เกี่ยวกับหลักพื้นฐานของวิทยาการคอมพิวเตอร์ รวมถึงภาษาการเขียนโปรแกรมคืออะไร พฤติกรรมของหุ่นยนต์คืออะไร และวิธีปรับเปลี่ยนพฤติกรรมของหุ่นยนต์ จากนั้นคุณจะนำทักษะเหล่านี้ไปใช้โดยการระบุพฤติกรรมของแขนหุ่นยนต์ 6 แกน
ในบทเรียนนี้ คุณจะได้เรียนรู้วิธีการเข้ารหัสแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกน x
เมื่อสิ้นสุดบทเรียนนี้ คุณจะเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน x เพื่อหาค่า x ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนที่ไปได้
การเข้ารหัสแขน 6 แกนตามแกน X
คุณสามารถใช้ข้อมูลเกี่ยวกับพิกัดและวิธีการเคลื่อนที่ของแขน 6 แกนในพื้นที่ 3 มิติเพื่อเขียนโค้ดให้แขน 6 แกนเคลื่อนที่โดยอัตโนมัติตามแกน x ทำตามขั้นตอนต่อไปนี้เพื่อเขียนโค้ดแขน 6 แกนเพื่อเคลื่อนไปตามแกน x
ใน VEXcode เปิดโครงการ บล็อกใหม่
ทำตามขั้นตอนในวิดีโอเพื่อเปิดโปรเจ็กต์ใหม่
เลือกตัวเลือก ไฟล์ ในแถบเครื่องมือเพื่อเปิดเมนูไฟล์ จากนั้นเลือก โปรเจ็กต์บล็อกใหม่ หน้าต่างป๊อปอัปจะปรากฏขึ้นพร้อมตัวเลือกสำหรับ EXP Brain หรือ 6-Axis Arm เลือก แขน 6 แกน. จากนั้นจึงเปิดโครงการใหม่
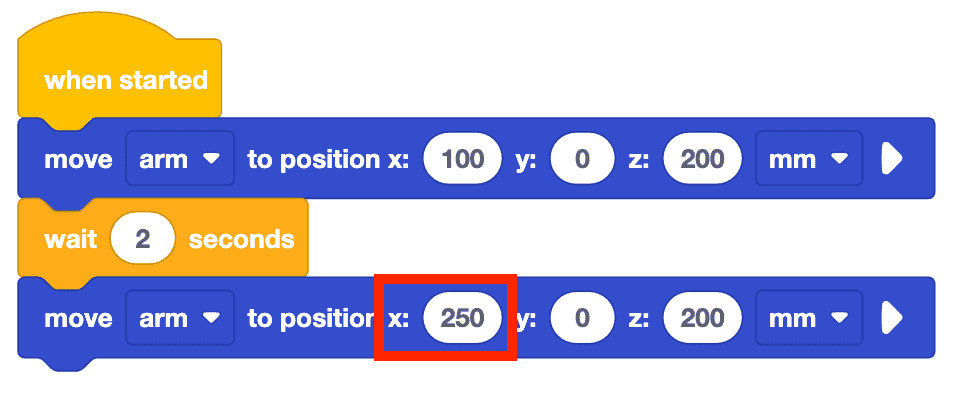
สร้างโครงการใหม่ตามที่แสดงที่นี่โดยลากบล็อกเข้าไปในพื้นที่ทำงานและแนบตามที่แสดง
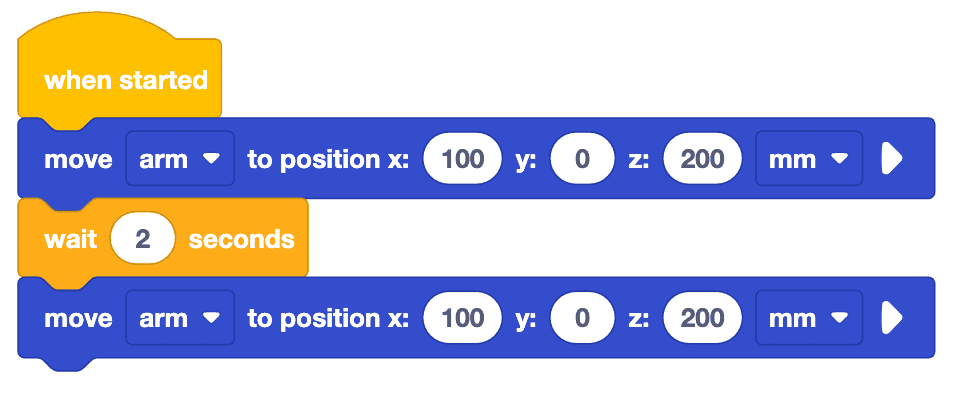
โปรเจ็กต์นี้ใช้บล็อก ย้ายไปที่ตำแหน่ง เพื่อย้ายปลายของแขน 6 แกนในอวกาศ บล็อกนี้มีช่องว่างสำหรับค่าพิกัด x, y และ z ที่จะป้อน บล็อคนี้จะถูกใช้ตลอดบทเรียนนี้เพื่อย้ายแขน 6 แกนไปยังพิกัดใหม่
โปรดทราบว่าบล็อคนี้รวมค่าพิกัดเต็ม (100, 0, 200) จำไว้ว่าแขน 6 แกนต้องมีค่าสำหรับแต่ละแกนจึงจะเคลื่อนที่ไปยังตำแหน่งที่ต้องการได้
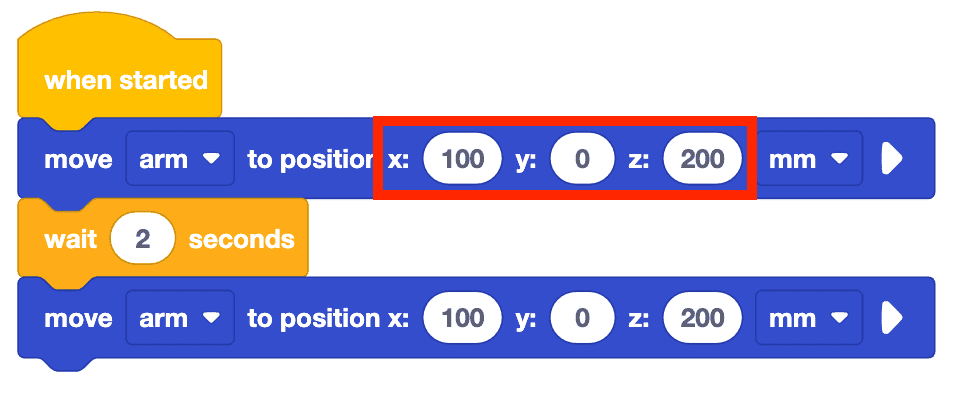
เปลี่ยนค่า x ใน ที่สอง เลื่อนไปยังตำแหน่ง บล็อกจาก 100 มม. เป็น 250 มม.
คุณคิดว่าสิ่งนี้จะส่งผลให้ 6-Axis Arm ทำอะไรได้บ้าง? บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
หมายเหตุ: ค่า y และ z ไม่มีการเปลี่ยนแปลงที่นี่ เนื่องจากเป้าหมายคือการเปลี่ยนแปลงและสังเกตแกนละแกน การรักษาค่า y และ z ไว้เท่าเดิมแต่การเปลี่ยนค่า x ทำให้เราเห็นได้ว่าแขน 6 แกนจะเคลื่อนที่ไปตามแกน x อย่างไร
เปลี่ยนชื่อโครงการและบันทึกลงในอุปกรณ์ของคุณ
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode ดำเนินโครงการ
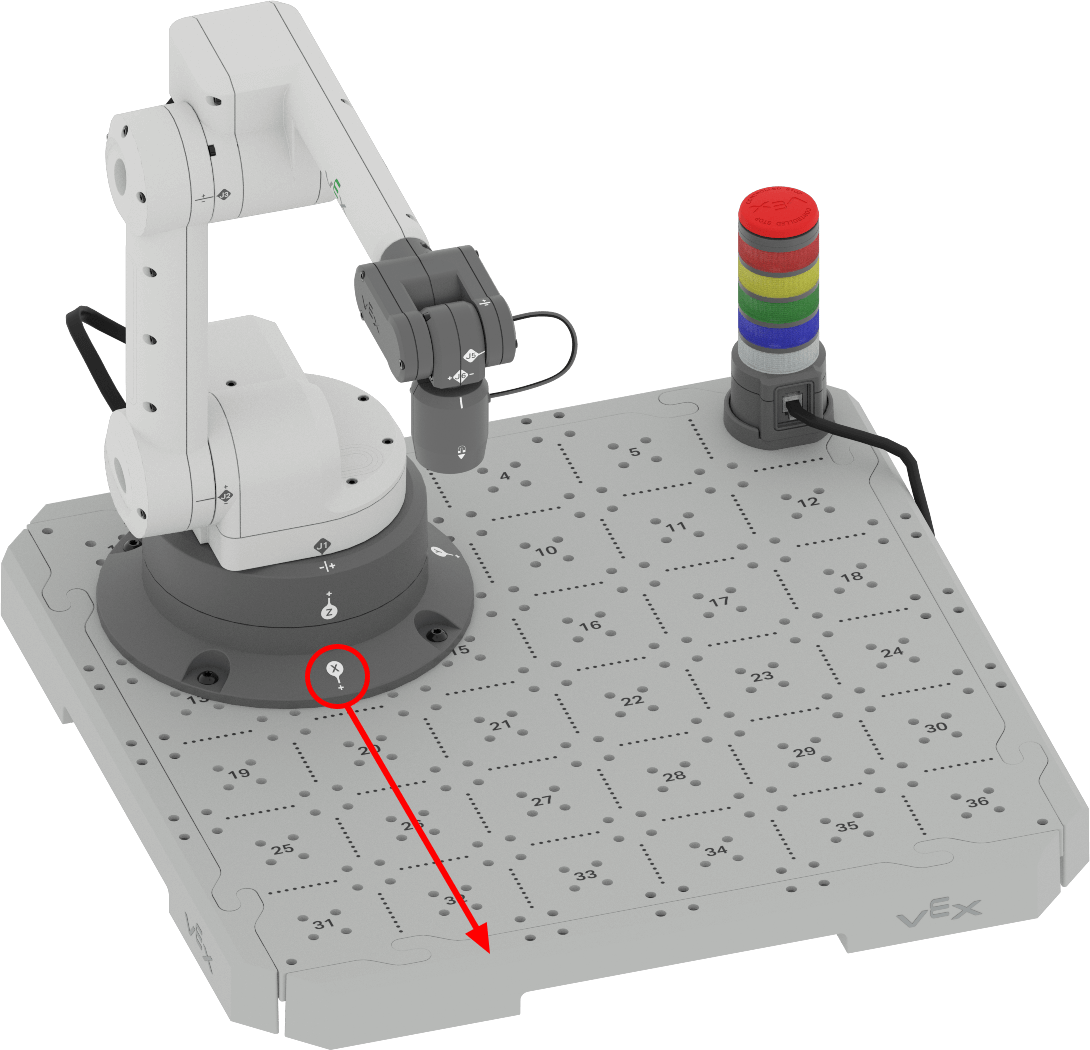
สังเกตแขน 6 แกนขณะเคลื่อนที่ไปตามแกน x สังเกตว่าแขน 6 แกนจะเริ่มต้นด้วยการเคลื่อนไปยังตำแหน่งปลอดภัย (120, 0, 100) จากนั้นจึงจะดำเนินการโครงการ
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนที่
บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ แขน 6 แกนเคลื่อนไหวอย่างไรในโปรเจ็กต์นี้? มันเหมือนหรือแตกต่างกับคำทำนายของคุณหรือเปล่า? ทำไม?
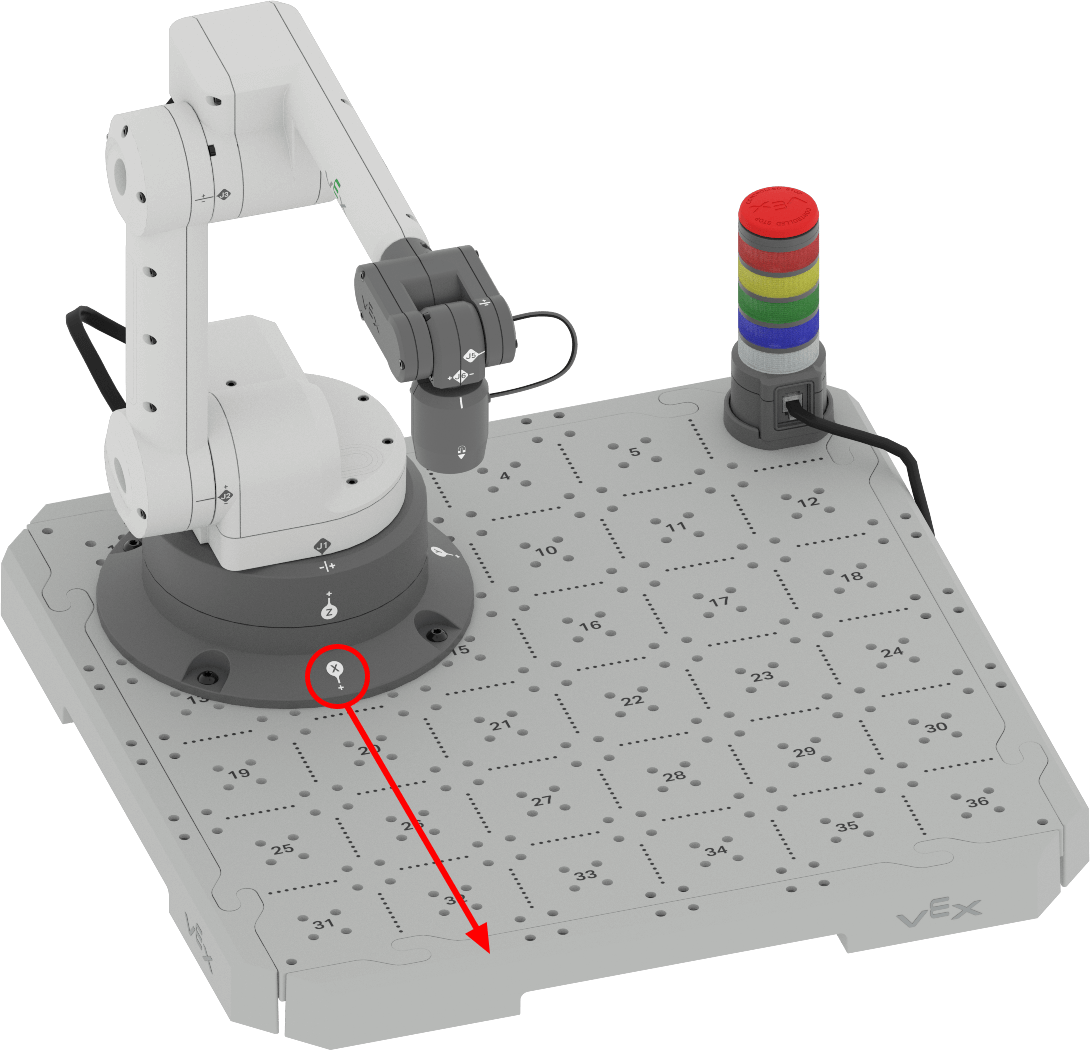
สังเกตว่าเมื่อค่า x เปลี่ยนแปลง แขน 6 แกนจะหดกลับและขยายไปตามแกน x ในแอนิเมชั่นนี้ เนื่องจากแขน 6 แกนจะขยายไปข้างหน้าออกจากฐาน และยืดไปด้านหลังเข้าหาฐานตามแนวแกน x
ก้าวผ่านโครงการ
ตอนนี้ คุณได้รันโครงการด้วยปุ่ม 'RUN' แล้ว คุณยังสามารถรันโครงการโดยใช้ปุ่ม 'STEP' ได้อีกด้วย คุณสมบัติ Step จะดำเนินโครงการทีละบล็อก สิ่งนี้สามารถช่วยให้คุณเห็นได้อย่างชัดเจนว่าแต่ละบล็อกในโปรเจ็กต์สอดคล้องกับพฤติกรรมของหุ่นยนต์อย่างไร ปฏิบัติตามขั้นตอนต่อไปนี้เพื่อดำเนินการตามโครงการ
กดปุ่ม STEP
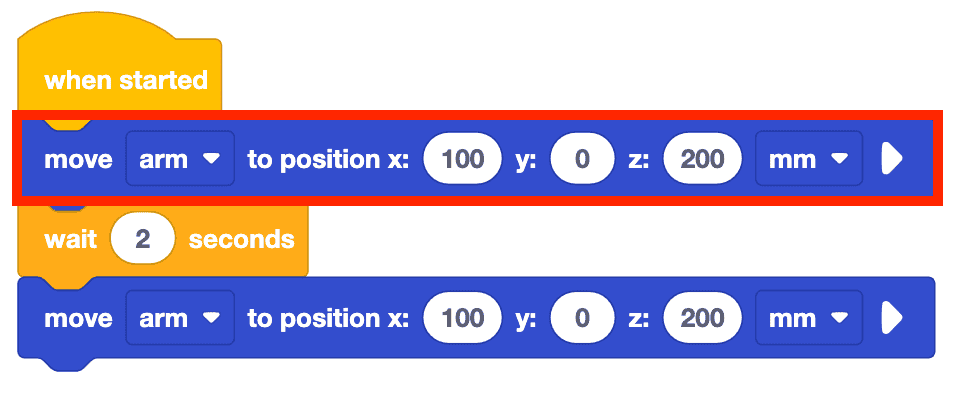
แขน 6 แกนจะเคลื่อนไปยังตำแหน่งปลอดภัย จากนั้นบล็อกแรกในสแต็กที่เชื่อมต่อกับบล็อก เมื่อเริ่มต้น จะถูกเน้น ในโปรเจ็กต์นี้ บล็อก ย้ายไปตำแหน่ง จะถูกเน้น แต่จะไม่ดำเนินการจนกว่าจะกดปุ่ม STEP อีกครั้งตามที่แสดงในวิดีโอนี้
กดปุ่ม STEP อีกครั้งเพื่อรันบล็อก ย้ายไปที่ตำแหน่ง
เมื่อรันบล็อกแล้ว ไฮไลต์จะเลื่อนไปที่บล็อกถัดไปในสแต็ก ซึ่งก็คือบล็อก รอ ดังที่แสดงในวิดีโอนี้
12. การดำเนินโครงการจะปฏิบัติตามกระบวนการ ขั้นแรกจะเน้นที่บล็อก จากนั้นจึงดำเนินการ เลือกปุ่ม STEP ต่อไปเพื่อดำเนินการกับบล็อกที่เหลือในโครงการทีละบล็อกตามที่แสดงในวิดีโอด้านล่าง นี่อาจมีประโยชน์มากเมื่อพยายามแก้ไขปัญหาในโครงการ เนื่องจากคุณสามารถดูพฤติกรรมของหุ่นยนต์แต่ละตัวได้ชัดเจนยิ่งขึ้น ชมวิดีโอข้างล่างเพื่อดูส่วนที่เหลือของโครงการที่ดำเนินการด้วยฟีเจอร์ Step
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีการเขียนโปรแกรมแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกน x แล้ว คุณก็จะฝึกฝนทักษะเหล่านี้ได้ ในกิจกรรมนี้ คุณจะเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน x เพื่อหาค่า x ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนที่ไปได้
- ทำนายค่า x ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนไปได้ บันทึกค่าที่คาดการณ์ไว้ในสมุดบันทึกวิศวกรรมของคุณ
- ใช้โครงการเดียวกันจากด้านบน เปลี่ยนค่า x จาก ในการย้าย ไปยังตำแหน่ง บล็อกเป็น ตามค่าที่คุณคาดการณ์ไว้
- รันโครงการของคุณเพื่อทดสอบการทำนายของคุณ ตรวจสอบให้แน่ใจว่า Arm 6 แกนของคุณเชื่อมต่อกับ VEXcode
- ดำเนินการคาดการณ์และทดสอบค่า x ต่างๆ ต่อไป อย่าลืมบันทึกคำทำนายและผลลัพธ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณเมื่อทำการทดสอบโครงการของคุณ คุณพบค่าต่ำสุดและค่าสูงสุดเท่าไร
- เปรียบเทียบผลลัพธ์ของคุณกับค่า ของกลุ่มอื่น มันเหมือนหรือแตกต่างกันไหม? กลุ่มใดมีค่ามากที่สุดและน้อยที่สุด ทดสอบค่าเหล่านั้นและปรับผลลัพธ์ของคุณหากจำเป็น
ตรวจสอบความเข้าใจของคุณ
ก่อนจะเริ่มบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบคำถามความเข้าใจของคุณ > (Google Doc / .docx / .pdf)
เลือก ถัดไป > เพื่อทำ การสะท้อนกลางหน่วยให้เสร็จสมบูรณ์