
Lição 3: Movimento autónomo ao longo do eixo X
Na lição anterior, aprendeu sobre os fundamentos da ciência da computação, incluindo o que é uma linguagem de programação, o que é o comportamento de um robô e como modificar o comportamento de um robô. De seguida, aplicou essas competências identificando os comportamentos do braço robótico de 6 eixos.
Nesta lição, aprenderá a codificar o braço de 6 eixos para se mover ao longo do eixo x.
No final desta lição, irá codificar o braço de 6 eixos para se mover ao longo do eixo x para encontrar o valor x mínimo e máximo para o qual o braço de 6 eixos se pode mover.
Codificação do braço de 6 eixos ao longo do eixo X
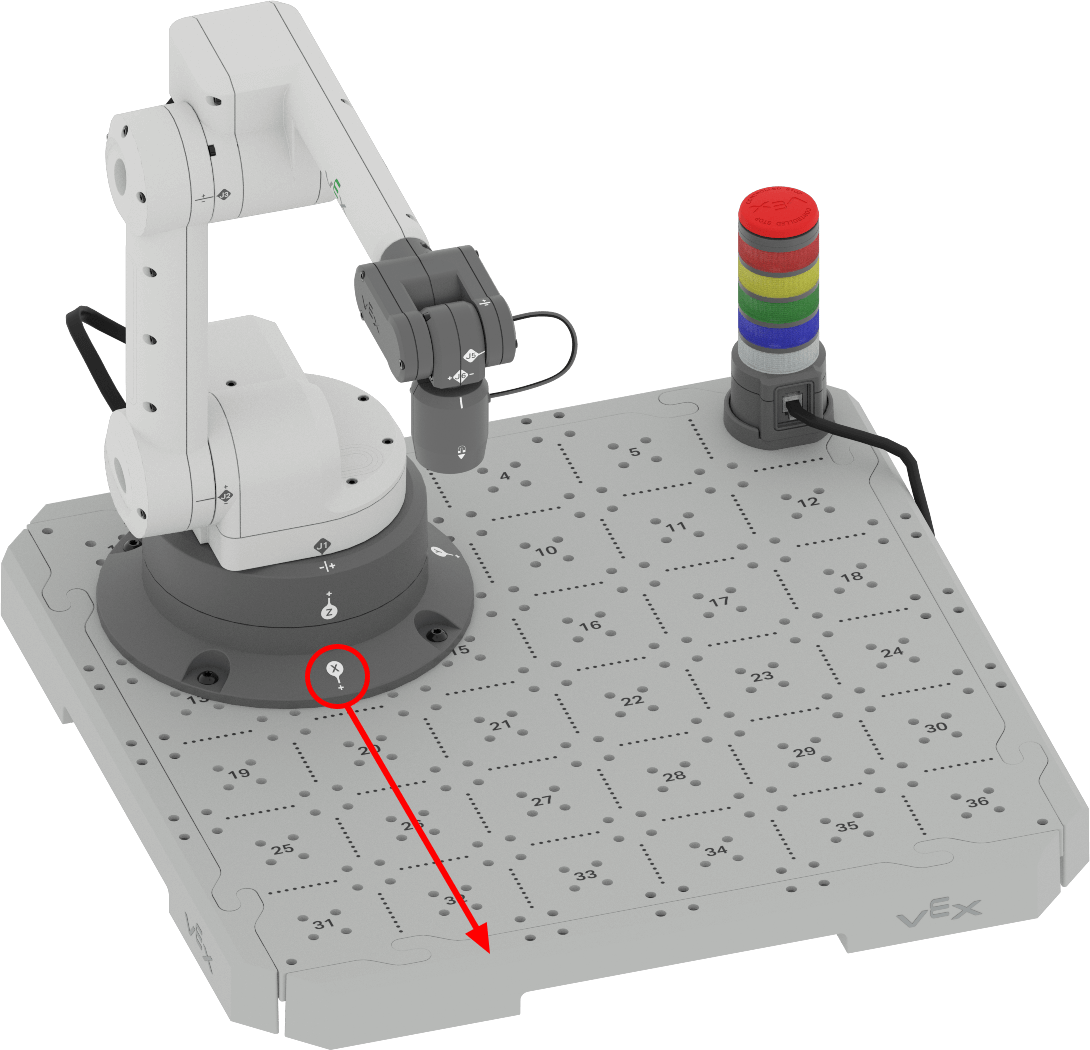
Pode utilizar as informações sobre as coordenadas e como o braço de 6 eixos se move no espaço 3D para o codificar para se mover autonomamente ao longo do eixo x. Siga os passos abaixo para codificar o braço de 6 eixos para se mover ao longo do eixo x.
No VEXcode, abra um Projecto Novos Blocos.
Siga os passos no vídeo para abrir um novo projeto.
Selecione a opção Ficheiro na Barra de Ferramentas para abrir o menu Ficheiro e, em seguida, selecione Novo Desenho de Blocos. Aparece uma janela pop-up com a opção EXP Brain ou 6-Axis Arm. Selecione Braço de 6 eixos. O novo projeto é então aberto.
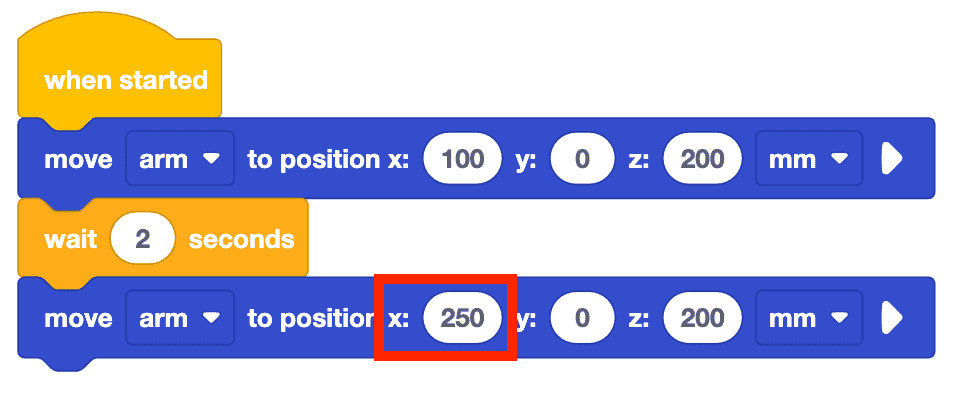
Recrie o projeto aqui apresentado arrastando os blocos para o espaço de trabalho e anexando-os como mostrado.
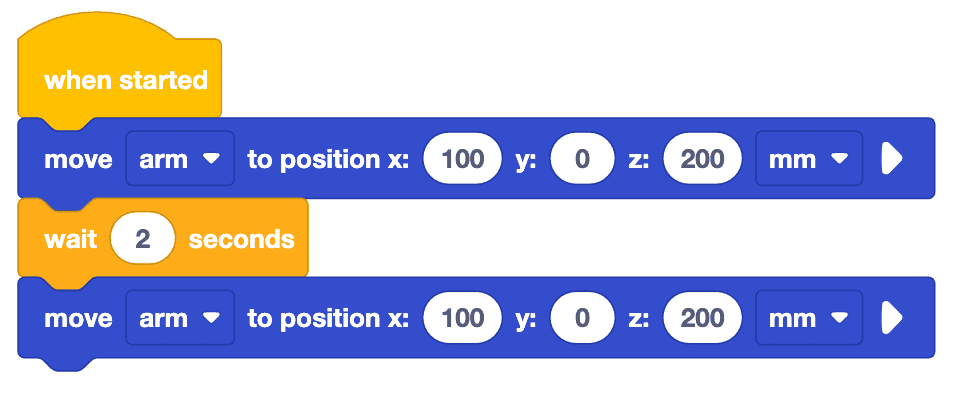
Este projeto utiliza o bloco Mover para a posição para mover a extremidade do braço de 6 eixos no espaço. Este bloco tem espaços para que sejam introduzidos os valores das coordenadas x, y e z. Este bloco será utilizado ao longo desta lição para mover o braço de 6 eixos para uma nova coordenada.
Note que este bloco inclui os valores completos das coordenadas (100, 0, 200). Lembre-se de que o braço de 6 eixos requer um valor para cada eixo para se mover para o local desejado.
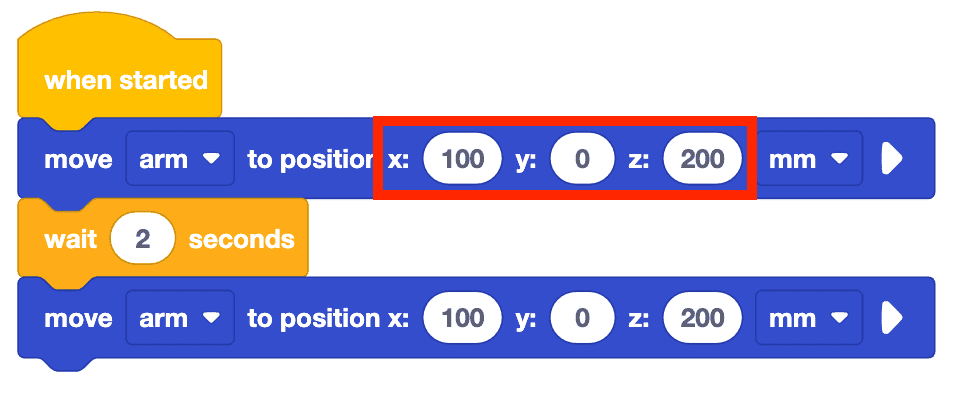
Altere o valor x no segundo bloco Deslocar para a posição de 100 mm para 250 mm.
O que acha que fará com que o braço de 6 eixos faça? Registe a sua previsão no seu caderno de engenharia.
Nota: Os valores y e z não são aqui alterados porque o objetivo é alterar e observar um eixo de cada vez. Manter os valores de y e z iguais, mas alterar os valores de x, permite-nos ver como o braço de 6 eixos se moverá ao longo do eixo x.
Renomeie o projeto e guarde-o no seu dispositivo.
Certifique-se de que o braço de 6 eixos está ligado ao VEXcode. Execute o projeto.
Observe o braço de 6 eixos enquanto se move ao longo do eixo x. Note que o braço de 6 eixos começará a mover-se para a posição segura (120, 0, 100) e, em seguida, executará o projeto.
Pare o projeto quando o braço de 6 eixos parar de se mover.
Registe as suas observações no seu caderno de engenharia. Como se moveu o braço de 6 eixos neste projeto? É semelhante ou diferente da sua previsão? Porquê?
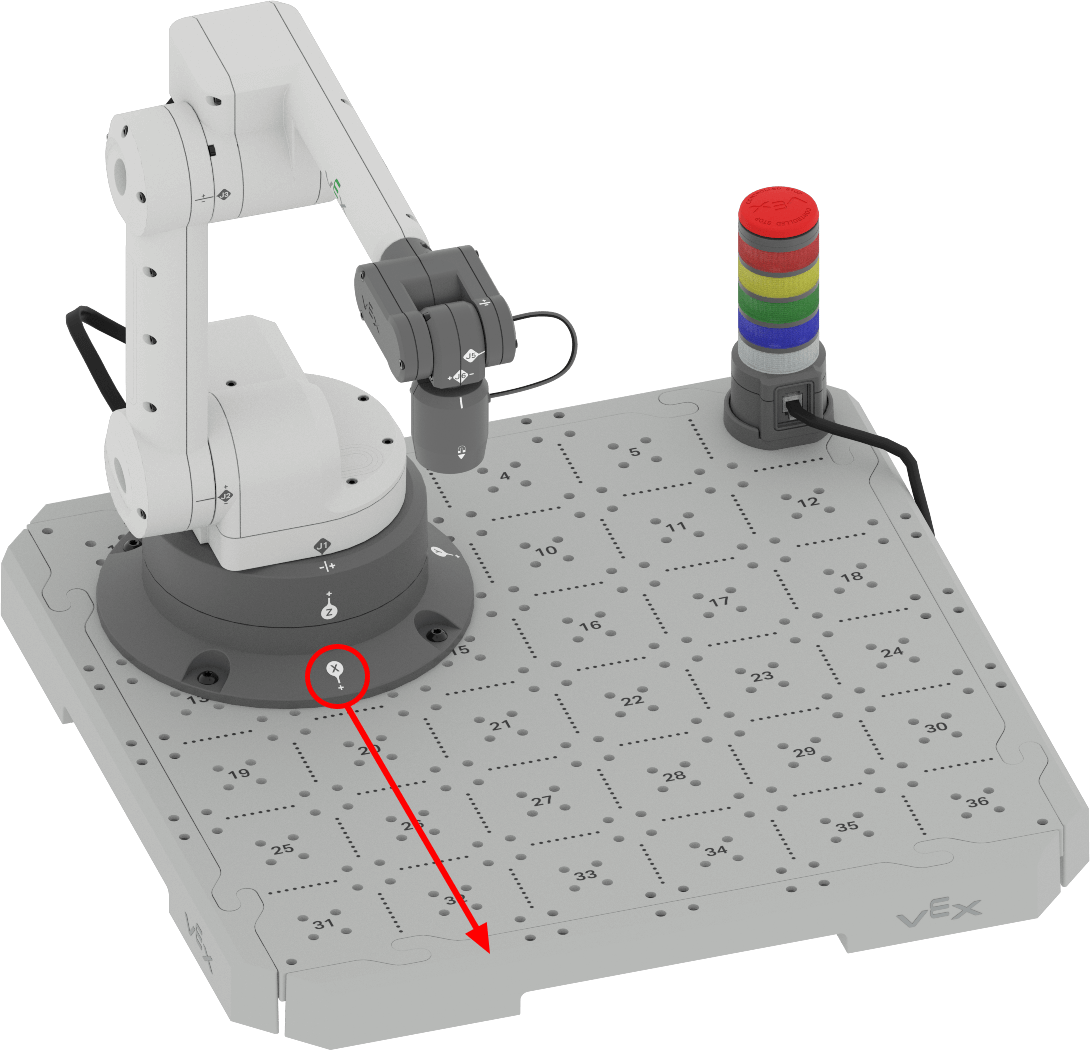
Note-se que quando o valor x é alterado, o braço de 6 eixos retrai-se e estende-se ao longo do eixo x. Nesta animação, o braço de 6 eixos estende-se para a frente, afastando-se da base, e para trás em direção a esta, ao longo do eixo x.
Percorrendo o projeto
Agora que já executou o projeto com o botão 'EXECUTAR', também pode executá-lo utilizando o botão 'PASSO'. O recurso Step executa um projeto um bloco de cada vez. Isto pode permitir-lhe ver claramente como cada bloco do projeto corresponde a um comportamento do robô. Siga os passos abaixo para avançar com o projeto.
Prima o botão STEP.
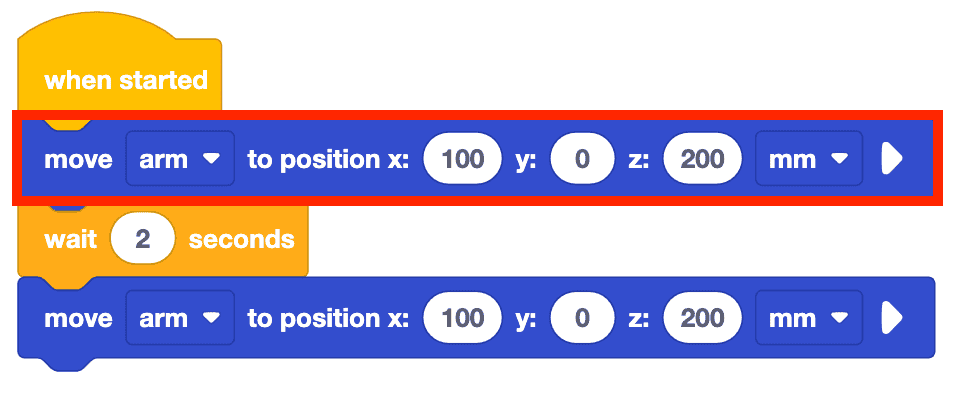
O braço de 6 eixos irá mover-se para a posição segura e, em seguida, o primeiro bloco da pilha ligado ao bloco Quando iniciado será destacado. Neste projeto, o bloco Mover para a posição será destacado, mas não será executado até que o botão PASSO seja premido uma segunda vez, como mostrado neste vídeo.
Prima o botão STEP uma segunda vez para executar o bloco Mover para a posição.
Depois de o bloco ser executado, o destaque será movido para o bloco seguinte da pilha, o bloco Wait , como mostra este vídeo.
12. Percorrer um projeto segue-se a um processo – primeiro é destacado um bloco e depois é executado. Continue a selecionar o botão PASSO para executar os restantes blocos no projeto, um de cada vez, como mostra o vídeo abaixo. Isto pode ser muito útil quando se tenta solucionar problemas de um projeto, uma vez que se pode visualizar os comportamentos individuais dos robôs com mais clareza. Veja o vídeo abaixo para ver o resto do projeto executado com o recurso Step.
Atividade
Agora que aprendeu a codificar o braço de 6 eixos para se mover ao longo do eixo x, vai praticar estas competências. Nesta atividade, irá codificar o braço de 6 eixos para se mover ao longo do eixo x para encontrar os valores x mínimo e máximo para os quais o braço de 6 eixos se pode mover.
- Faça uma previsão para os valores x mínimo e máximo para os quais o braço de 6 eixos se pode mover. Registe os valores previstos no seu caderno de engenharia.
- Utilizando o mesmo projeto acima, altere os valores de x nos blocos Mover para a posição para os seus valores previstos.
- Execute o seu projeto para testar as suas previsões. Certifique-se de que o seu braço de 6 eixos está ligado ao VEXcode.
- Continue a prever e a testar diferentes valores de x. Não se esqueça de registar as suas previsões e resultados no seu caderno de engenharia ao testar os seus projetos. Que valores mínimo e máximo de encontra?
- Compare os seus resultados com os valores de outros grupos. São semelhantes ou diferentes? Qual o grupo que tem os valores mais altos e mais baixos? Teste estes valores e ajuste os seus resultados, se necessário.
Verifique a sua compreensão
Antes de iniciar a lição seguinte, certifique-se de que compreende os conceitos desta lição respondendo às questões do documento abaixo no seu caderno de engenharia.
Questões para verificar a sua compreensão > (Google Doc / .docx / .pdf)
Selecione Seguinte > para concluir a Reflexão Intermédia.