
수업 3: X축을 따라 자율 이동
이전 수업에서는 프로그래밍 언어가 무엇인지, 로봇 행동이 무엇인지, 로봇 행동을 수정하는 방법 등 컴퓨터 과학의 기본 사항에 대해 알아보았습니다. 그런 다음 6축 로봇 팔의 동작을 식별하여 이러한 기술을 적용했습니다.
이 수업에서는 6축 팔을 x축을 따라 움직이도록 코딩하는 방법을 알아봅니다.
이 수업을 마치면 6축 팔이 x축을 따라 움직이도록 코드를 작성하여 6축 팔이 움직일 수 있는 최소 및 최대 x값을 찾습니다.
X축을 따라 6축 암 코딩
6축 암이 3D 공간에서 어떻게 움직이는지에 대한 정보와 좌표를 활용하여 6축 암이 x축을 따라 자율적으로 움직이도록 코딩할 수 있습니다. 아래 단계에 따라 6축 팔을 x축을 따라 움직이도록 코딩하세요.
VEXcode에서 새 블록 프로젝트를 엽니다.
영상의 단계에 따라 새로운 프로젝트를 열어보세요.
도구 모음에서파일옵션을 선택하여 파일 메뉴를 열고,새 블록 프로젝트를 선택합니다.EXP Brain 또는 6축 Arm 옵션이 있는 팝업 창이 나타납니다. 6축 암선택하세요. 그러면 새로운 프로젝트가 열립니다.
여기에 표시된 프로젝트를 다시 만들려면 블록을 작업 공간으로 끌어다 놓고 표시된 대로 첨부합니다.

이 프로젝트에서는 위치 블록을 사용하여 6축 팔의 끝을 공간으로 이동합니다. 이 블록에는 x, y, z 좌표 값을 입력할 수 있는 공간이 있습니다. 이 블록은 이 수업 전체에서 6축 팔을 새로운 좌표로 옮기는 데 사용됩니다.

이 블록에는 전체 좌표 값(100, 0, 200)이 포함되어 있습니다. 6축 암은 원하는 위치로 이동하기 위해 각 축에 대한 값이 필요하다는 점을 기억하세요.

두 번째 의 x값을 변경합니다. 위치 블록을 100mm에서 250mm로 이동합니다.
이렇게 하면 6축 암이 어떤 역할을 할 것이라고 생각하시나요? 엔지니어링 노트에 예측 내용을 기록하세요.
참고: 여기서는 y 및 z 값이 변경되지 않습니다. 목표는 한 번에 한 축을 변경하고 관찰하는 것이기 때문입니다. y와 z 값은 그대로 두고 x 값을 바꾸면 6축 팔이 x축을 따라 어떻게 움직이는지 볼 수 있습니다.

프로젝트 이름을 바꾸고 장치에 저장하세요.

6축 암이 VEX코드에 연결되어 있는지 확인하세요. 프로젝트를 실행합니다.
6축 팔이 x축을 따라 움직이는 모습을 관찰하세요. 6축 암이 안전 위치(120, 0, 100)로 이동한 후 프로젝트를 실행합니다.

6축 암이 더 이상 움직이지 않으면 프로젝트를 중지합니다.
엔지니어링 노트에 관찰 내용을 기록하세요. 이 프로젝트에서 6축 암은 어떻게 움직였나요? 귀하의 예측과 비슷한가요, 아니면 다릅니까? 왜?

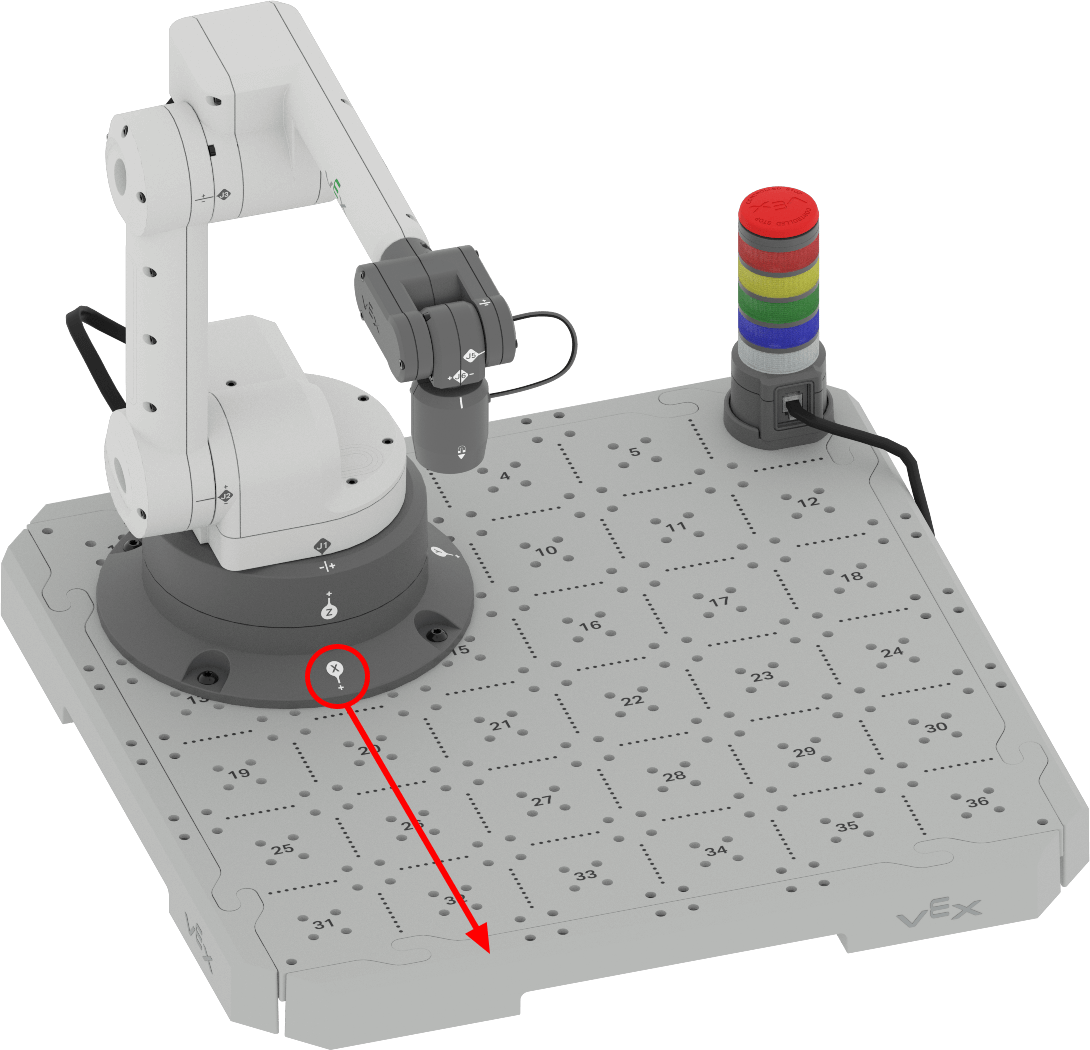
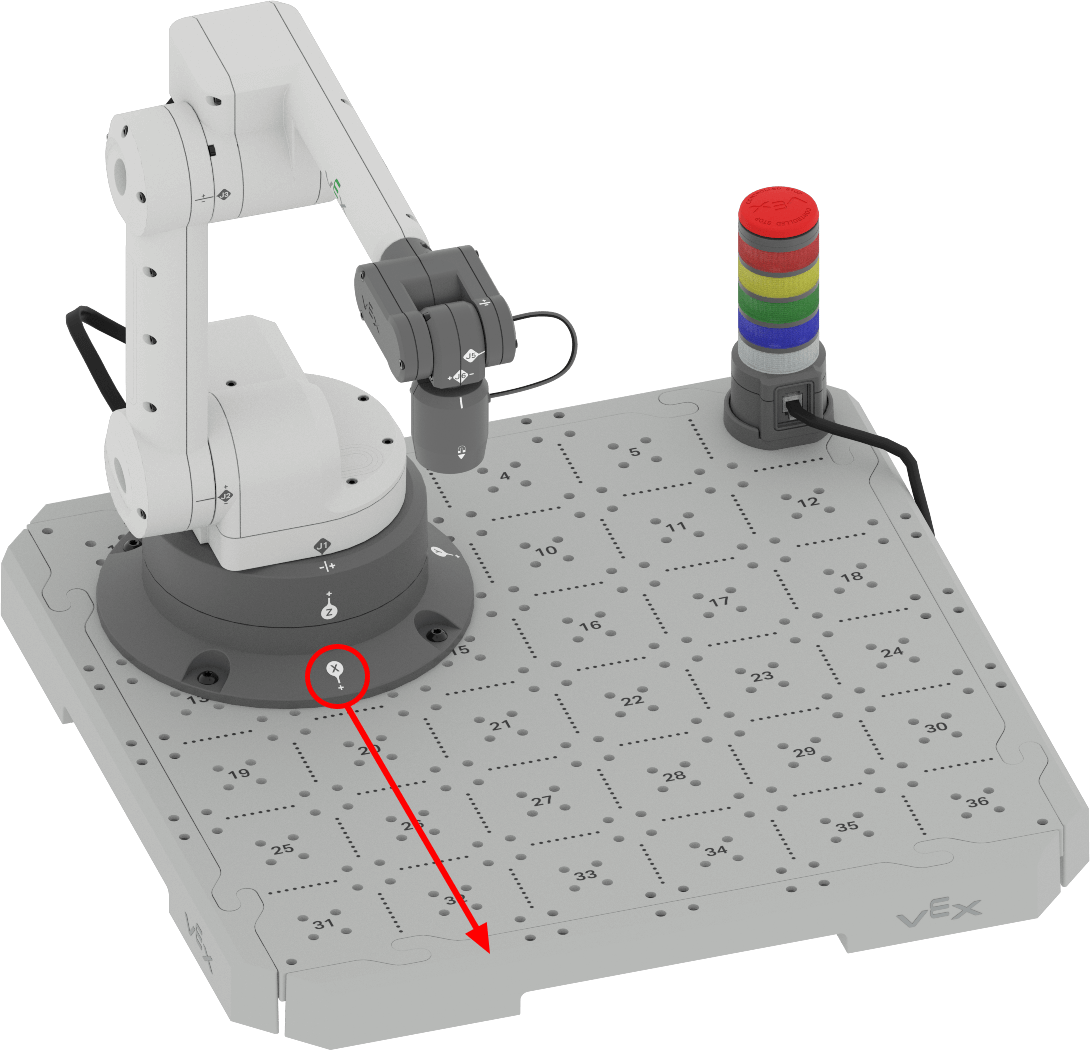
x값이 변경되면 6축 암이 x축을 따라 수축되고 확장되는 것을 확인하세요. 이 애니메이션에서는 6축 팔이 x축을 따라 바닥에서 앞으로 뻗어 나가고, 뒤로 바닥을 향해 뻗어 나갑니다.
프로젝트 진행
이제 'RUN' 버튼으로 프로젝트를 실행했으므로 'STEP' 버튼을 사용해서도 프로젝트를 실행할 수 있습니다. 단계 기능은 프로젝트를 한 번에 한 블록씩 실행합니다. 이를 통해 프로젝트의 각 블록이 로봇의 동작과 어떻게 대응하는지 명확하게 파악할 수 있습니다. 아래 단계에 따라 프로젝트를 진행해 보세요.
STEP 버튼을 누르세요.
6축 암 안전 위치로 이동한 다음, 블록에 연결된 스택의 첫 번째 블록이 강조 표시됩니다. 이 프로젝트에서는 위치 로 이동 블록이 강조 표시되지만, 이 영상에서 보여지는 것처럼 STEP 버튼을 두 번째로 누를 때까지 실행되지 않습니다.
STEP 버튼을 두 번째 눌러 위치 으로 이동 블록을 실행합니다.
블록이 실행되면 하이라이트는 이 영상에서 보여지는 것처럼 스택의 다음 블록인 Wait블록으로 이동합니다.
12. 프로젝트를 단계별로 진행하는 과정은 다음과 같습니다. 먼저 블록을 강조 표시한 다음 실행합니다. 아래 영상에서 보이는 것처럼, 프로젝트의 나머지 블록을 하나씩 실행하려면 STEP 버튼을 계속 선택하세요. 이 기능은 프로젝트 문제를 해결할 때 매우 유용할 수 있는데, 개별 로봇의 동작을 더욱 명확하게 볼 수 있기 때문입니다. 나머지 프로젝트가 Step 기능으로 실행되는 모습을 보려면 아래 비디오를 시청하세요.
활동
이제 x축을 따라 움직이는 6축 팔을 코딩하는 방법을 배웠으므로 이러한 기술을 연습해 보겠습니다. 이 활동에서는 6축 팔이 x축을 따라 움직이도록 코드를 작성하여 6축 팔이 움직일 수 있는 최소 및 최대 x값을 찾습니다.
- 6축 암이 움직일 수 있는 최소 및 최대 x값을 예측해 보세요. 예측된 값을 엔지니어링 노트북에 기록하세요.
- 위의 동일한 프로젝트를 사용하여 위치로 이동 블록의 x 값을 예측한 값으로 변경합니다.
- 예측을 테스트하려면 프로젝트를 실행하세요. 6축 암이 VEX코드에 연결되어 있는지 확인하세요.
- 계속해서 다양한 x값을 예측하고 테스트합니다. 프로젝트를 테스트할 때는 예측과 결과를 엔지니어링 노트북에 기록해 두세요. 최소값과 최대값은 어떻게 되나요?
- 귀하의 결과를 다른 그룹의 값과 비교해보세요. 그것들은 비슷한가, 아니면 다른가? 어느 그룹이 가장 크고 가장 작은 값을 가지고 있나요? 해당 값을 테스트하고 필요한 경우 결과를 조정하세요.
이해도 확인
다음 수업을 시작하기 전에 엔지니어링 노트북에서 아래 문서의 질문에 답하여 이 수업의 개념을 이해했는지 확인하세요.
이해도 확인 질문 > (Google Doc / .docx / .pdf)
다음 > 선택하여 중간 단원 반성을 완료하세요.