
Lekce 3: Autonomní pohyb podél osy X
V předchozí lekci jste se seznámili se základy informatiky, včetně toho, co je programovací jazyk, co je chování robota a jak modifikovat chování robota. Tyto dovednosti jste poté aplikovali identifikací chování 6osého robotického ramene.
V této lekci se naučíte, jak naprogramovat 6osé rameno pro pohyb podél osy x.
Na konci této lekce naprogramujete 6osé rameno tak, aby se pohybovalo podél osy x a nacházelo minimální a maximální hodnotu x, na kterou se 6osé rameno může pohybovat.
Kódování 6osého ramene podél osy X
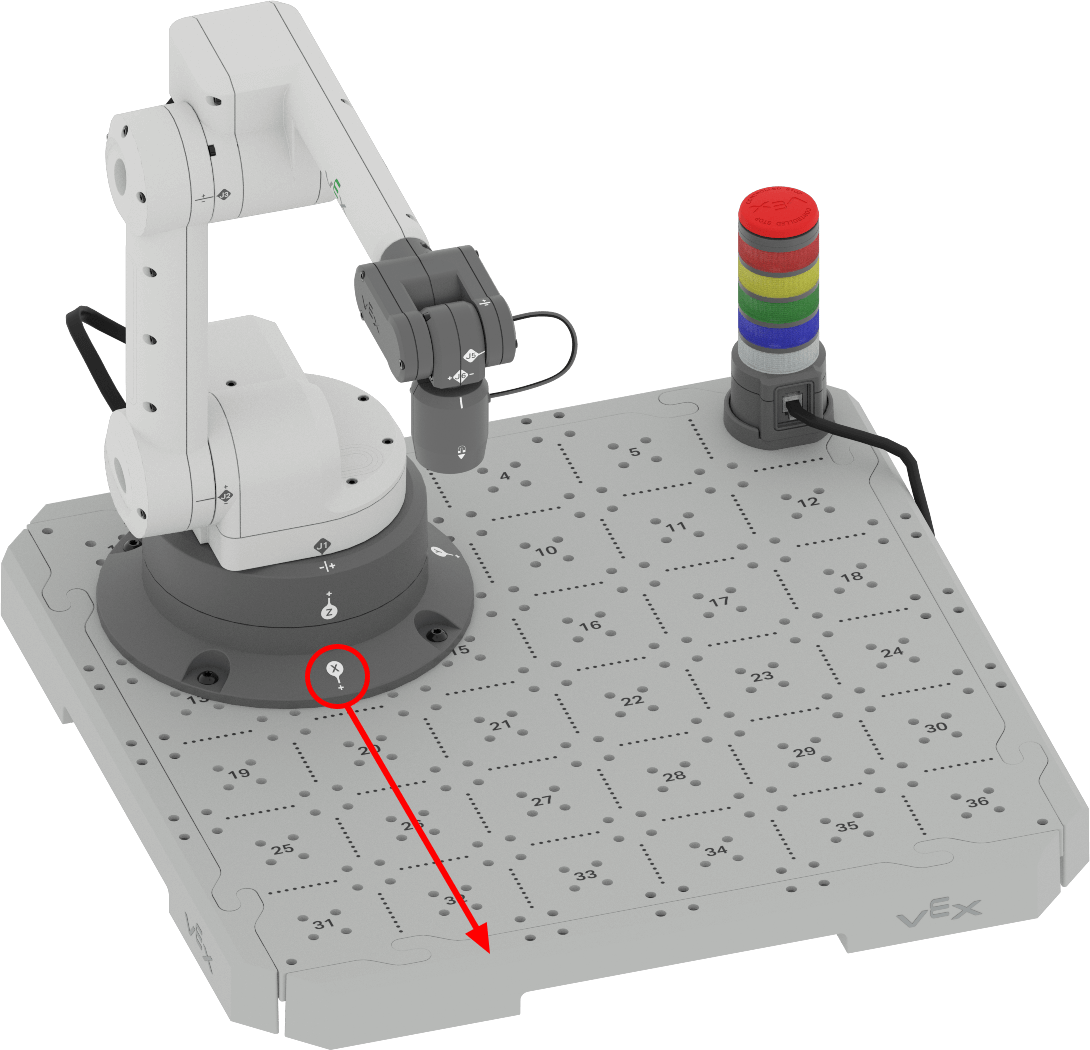
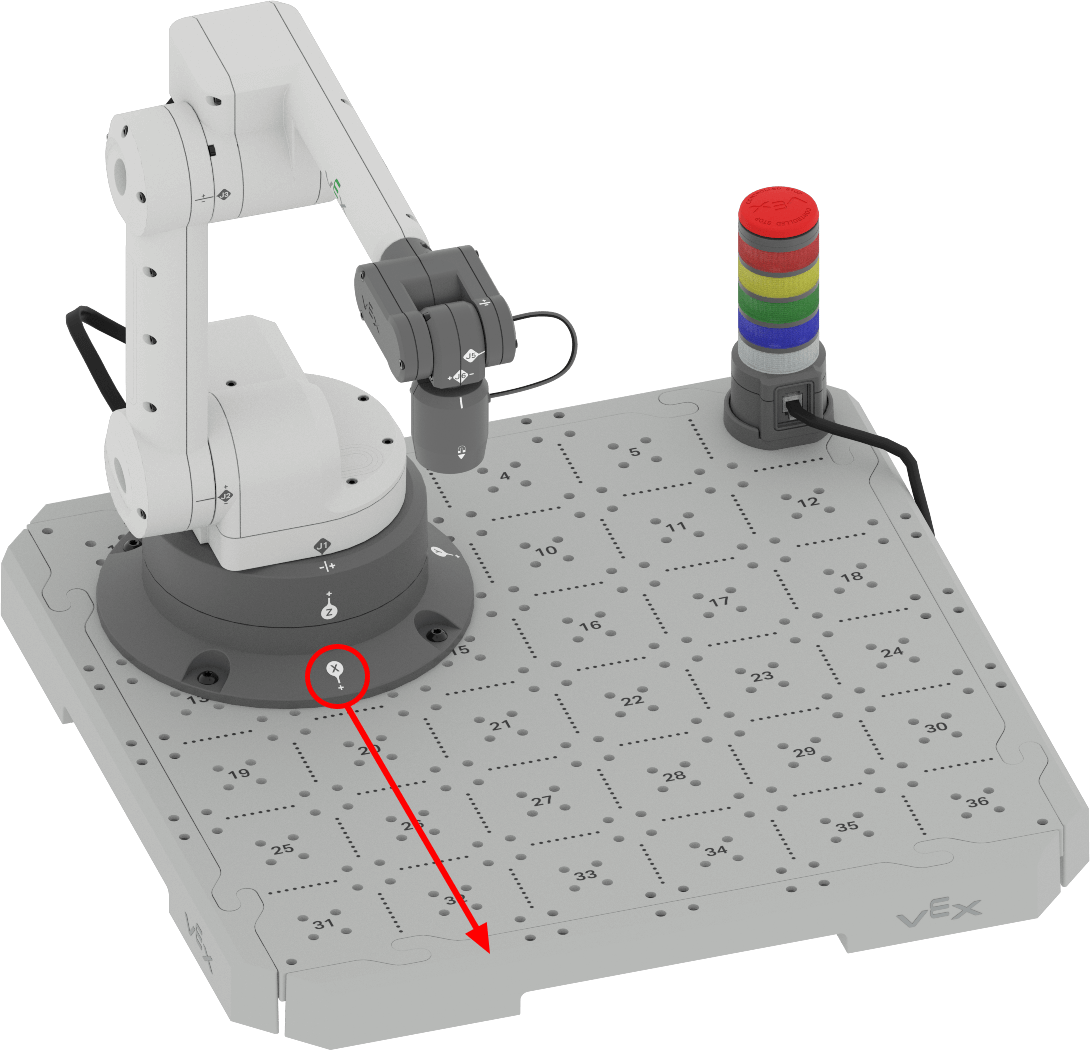
Informace o souřadnicích a o tom, jak se 6osé rameno pohybuje ve 3D prostoru, můžete použít k naprogramování 6osého ramene tak, aby se pohybovalo autonomně podél osy x. Postupujte podle níže uvedených kroků a naprogramujte 6osé rameno tak, aby se pohybovalo podél osy x.
Ve VEXcode otevřete New Blocks Project.
Postupujte podle kroků ve videu a otevřete nový projekt.
V panelu nástrojů vyberte možnostSoubor, čímž otevřete nabídku Soubor, a poté vyberteNový blokový projekt.Zobrazí se vyskakovací okno s možností EXP Brain nebo 6osé rameno. Vyberte6osé rameno. Poté se otevře nový projekt.
Zde zobrazený projekt znovu vytvořte přetažením bloků do pracovního prostoru a jejich připojením, jak je znázorněno.
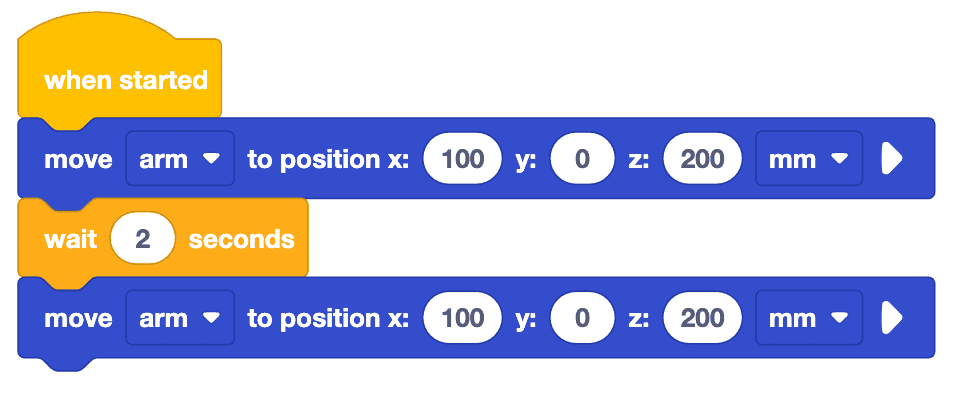
Tento projekt používá blok Move to position k posunutí konce 6osého ramene v prostoru. Tento blok obsahuje mezery pro zadání souřadnic x, y a z. Tento blok bude v této lekci použit k přesunutí 6osého ramene na novou souřadnici.
Všimněte si, že tento blok obsahuje plné hodnoty souřadnic (100, 0, 200). Připomeňme, že 6osé rameno vyžaduje hodnotu pro každou osu, aby se mohlo přesunout na požadované místo.
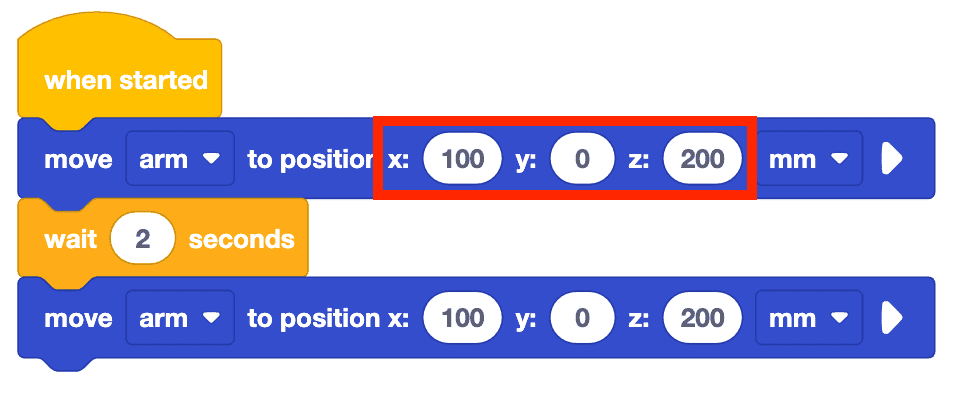
Změňte hodnotu x v druhém bloku Move to position ze 100 mm na 250 mm.
Co si myslíte, že to způsobí, že 6osé rameno udělá? Zaznamenejte si svou předpověď do svého technického sešitu.
Poznámka: Hodnoty y a z se zde nemění, protože cílem je měnit a pozorovat jednu osu najednou. Pokud zachováme stejné hodnoty y a z, ale změníme hodnoty x, uvidíme, jak se bude 6osé rameno pohybovat podél osy x.

Přejmenujte projekt a uložte jej do svého zařízení.
Ujistěte se, že je 6osé rameno připojeno k VEXcode. Spusťte projekt.
Pozorujte 6osé rameno, jak se pohybuje podél osy x. Všimněte si, že 6osé rameno se nejprve přesune do bezpečné polohy (120, 0, 100) a poté provede projekt.
Jakmile se 6osé rameno zastaví, zastavte projekt.
Svá pozorování si zaznamenejte do technického sešitu. Jak se v tomto projektu pohybovalo 6osé rameno? Je to podobné, nebo odlišné od vaší předpovědi? Proč?
Všimněte si, že když se změní hodnota x, 6osé rameno se zasune a vysune podél osy x. V této animaci se 6osé rameno vysouvá dopředu od základny a dozadu k ní podél osy x.
Krokování projektem
Nyní, když jste projekt spustili tlačítkem „RUN“, můžete jej spustit také tlačítkem „STEP“. Funkce Krok spouští projekt po bloku. To vám umožní jasně vidět, jak každý blok v projektu odpovídá chování robota. Postupujte podle níže uvedených kroků a projděte si projekt.
Stiskněte tlačítko KROK.
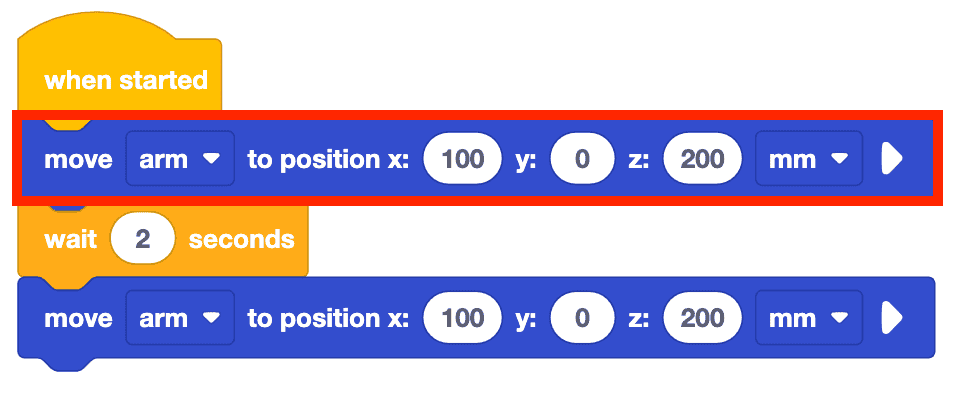
6osé rameno se přesune do bezpečné polohy a poté se zvýrazní první blok v zásobníku připojený k bloku Při spuštění. V tomto projektu se blok Move to position zvýrazní, ale neprovede se, dokud nebude tlačítko STEP stisknuto podruhé, jak je znázorněno v tomto videu.
Stiskněte tlačítko STEP podruhé pro spuštění bloku Move to position.
Jakmile je blok spuštěn, zvýraznění se přesune na další blok v zásobníku, blok Wait, jak je znázorněno v tomto videu.
12. Procházení projektu se řídí určitým procesem – nejprve se blok zvýrazní a poté se provede jeho provedení. Pokračujte ve výběru tlačítka STEP pro spuštění zbývajících bloků v projektu jeden po druhém, jak je znázorněno ve videu níže. To může být velmi užitečné při řešení problémů s projektem, protože můžete jasněji sledovat chování jednotlivých robotů. Podívejte se na video níže a uvidíte zbytek projektu provedeného s funkcí Step.
Aktivita
Nyní, když jste se naučili, jak naprogramovat 6osé rameno pro pohyb podél osy x, si tyto dovednosti procvičíte. V tomto cvičení naprogramujete 6osé rameno tak, aby se pohybovalo podél osy x a nacházelo minimální a maximální hodnoty x, na které se 6osé rameno může pohybovat.
- Předpovězte minimální a maximální hodnoty x, na které se může 6osé rameno pohybovat. Zaznamenejte si předpokládané hodnoty do svého technického sešitu.
- Pomocí stejného projektu z výše uvedeného příkladu změňte hodnoty x v blocích Move to positionna předpokládané hodnoty.
- Spusťte svůj projekt a ověřte si své předpovědi. Ujistěte se, že je vaše 6osé rameno připojeno k VEXcode.
- Pokračujte v predikci a testování různých hodnot x. Při testování projektů si nezapomeňte zaznamenat své předpovědi a výsledky do svého inženýrského sešitu. Jaké minimální a maximální hodnoty nacházíte?
- Porovnejte své výsledky s hodnotami ostatních skupin. Jsou si podobné, nebo odlišné? Která skupina má největší a nejmenší hodnoty? Otestujte tyto hodnoty a v případě potřeby upravte výsledky.
Ověřte si své znalosti
Než začnete s další lekci, ujistěte se, že rozumíte konceptům v této lekci, a to zodpovězením otázek v níže uvedeném dokumentu ve svém technickém sešitě.
Otázky k prověření vašich znalostí > (dokument Google / .docx / .pdf)
Vyberte Další > pro dokončení odrazu uprostřed jednotky.