
الدرس 5: الحركة المستقلة على طول المحور Z
في الدروس السابقة، استكشفت المحورين x وy عن طريق برمجة الذراع الروبوتية المكونة من 6 محاور للتحرك على طول هذين المحورين.
في هذا الدرس، سوف تتعلم عن المحور z وكيفية برمجة الذراع المكون من 6 محاور للتحرك على طول هذا المحور الثالث.
بحلول نهاية هذا الدرس، ستكون قادرًا على برمجة الذراع المكون من 6 محاور للتحرك على طول المحور z بما في ذلك التحرك مع تغير محاور متعددة في نفس الوقت.
مقدمة عن المحور Z
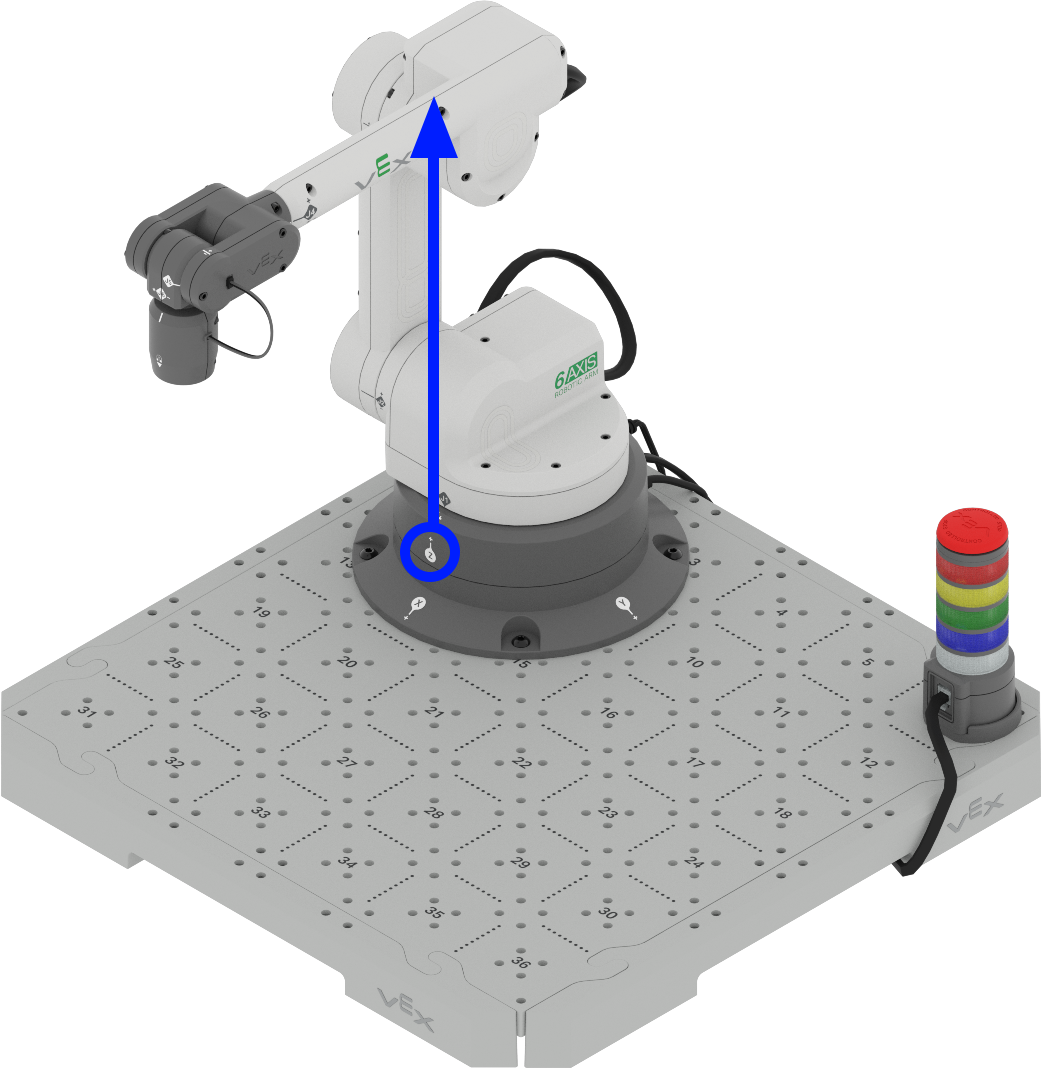
في نظام الإحداثيات الديكارتية، يمثل المحور z الحركة الرأسية أو الارتفاع.
على عكس المحورين x وy، اللذين يتوافقان عادةً مع الحركات الأفقية (من اليسار إلى اليمين ومن الأمام إلى الخلف)، فإن المحور z عمودي على كليهما، ويتحرك لأعلى ولأسفل كما هو موضح في هذا الفيديو. في البيئة الصناعية، يعد هذا المحور الرأسي أمرًا بالغ الأهمية للمهام التي تتطلب الرفع أو الخفض أو الوصول إلى ارتفاعات مختلفة.
في حالة الذراع المكون من 6 محاور، يتحكم المحور z في مدى ارتفاع أو انخفاض امتداد الذراع. إن الدقة في التحرك على طول المحور Z أمر بالغ الأهمية لكي تتمكن الذراع من الوصول إلى الأهداف بدقة وتجنب العوائق وإجراء العمليات الدقيقة كما هو موضح في هذا الفيديو.
في التصنيع، تستخدم الروبوتات غالبًا المحور Z لوضع المكونات على حزام ناقل، أو تكديس العناصر، أو تنفيذ
مهام التجميع التي تتطلب حركة رأسية. في المستودعات، تستخدم الأنظمة الروبوتية المحور Z لاسترجاع العناصر
أو تخزينها على مستويات مختلفة من الرفوف.
عند ترميز الحركات في VEXcode، ستحتاج إلى مراعاة المحور z للمهام التي تتضمن رفع أو خفض الذراع المكون
من 6 محاور كما هو موضح في هذا الفيديو. يؤدي هذا إلى إضافة طبقة إضافية من التعقيد مقارنة بالحركات
المقيدة بمحوري x وy كما رأيت في الدرسين 3 و4.
في مقطع الفيديو هذا، يبدأ الذراع ذو الستة محاور في الوضع الآمن، ثم يتحرك لالتقاط القرص الموجود على موقع البلاطة 18. يتحرك لأسفل على المحور z للتفاعل مع القرص، ثم يرفع القرص لأعلى على طول المحور z، للتحرك بأمان فوق الأقراص الأخرى الموجودة على البلاطة. ثم يتحرك الذراع ذو المحاور الستة فوق موقع البلاطة 33، ويتحرك لأسفل على المحور z لإسقاط القرص بأمان في موقعه الجديد.
ترميز الذراع المكون من 6 محاور على طول المحور Z
يمكن استخدام المحور z بنفس الطريقة التي قمت بها بترميز الحركات على طول المحورين x وy في الدروس السابقة. اتبع الخطوات أدناه لترميز الذراع المكون من 6 محاور للتحرك على طول المحور z.
افتح مشروعك المحفوظ من الدرس 4. قم بإعادة تسمية المشروع وقم بتغيير قيم z واحفظه على جهازك.
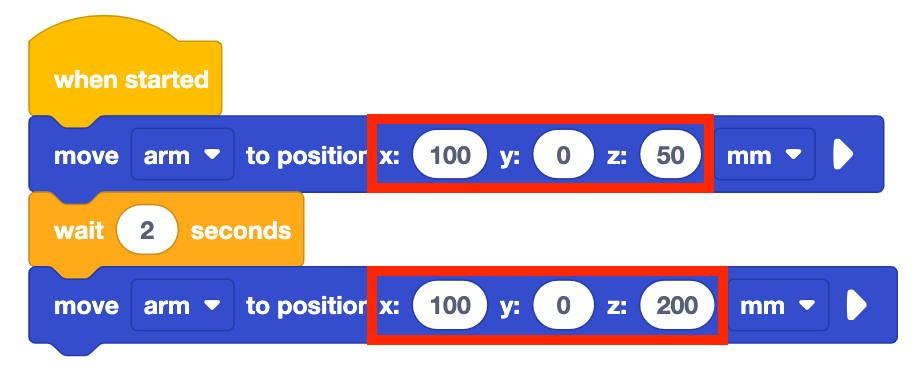
قم بتغيير قيمتي الكتلتين وانتقل إلى الموضع إلى الإحداثيات التالية. تذكر أن الإحداثيات تُكتب على النحو التالي (x, y, z).
- (100، 0، 50)
- (100، 0، 200)
ما هو برأيك السبب الذي سيؤدي إلى قيام الذراع المكون من 6 محاور بفعله؟ سجل توقعاتك في دفتر الهندسة الخاص بك.
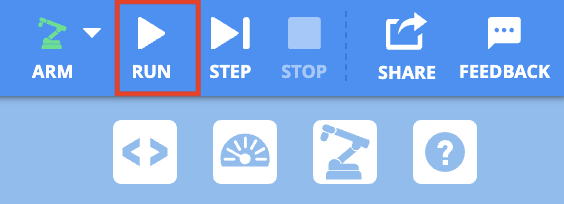
تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode. تشغيل المشروع.
راقب الذراع المكون من 6 محاور أثناء تحركه على طول المحور z. لاحظ أن الذراع المكون من 6 محاور سيبدأ بالتحرك إلى الوضع الآمن (120، 0، 100)، ثم سيقوم بتنفيذ الكتل في المشروع.
أوقف المشروع بمجرد توقف الذراع المكون من 6 محاور عن الحركة.
سجل ملاحظاتك في دفتر الهندسة الخاص بك. كيف تحرك الذراع ذو الستة محاور في هذا المشروع؟ هل هو مماثل أو مختلف عن توقعاتك؟ لماذا؟
لاحظ أنه عندما يتم تغيير قيمة z، يمتد الذراع المكون من 6 محاور وينكمش على طول المحور z، كما هو موضح في هذا الرسم المتحرك.
كيف يقارن ذلك بحركة ذراعك المكونة من 6 محاور في هذا المشروع؟
لمعلوماتك
يمكنك أيضًا دمج الحركات على طول محاور متعددة في وقت واحد عن طريق إدراج إحداثيات (x، y، z) في كتلة الانتقال إلى الموضع.
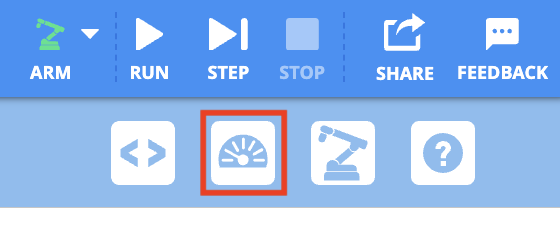
للعثور على إحداثيات (x, y, z) المحددة لموقع ما، يمكنك استخدام Monitor Console في VEXcode EXP. لفتح وحدة التحكم، حدد أيقونة Monitor Console في الزاوية اليمنى العليا من شريط الأدوات.
سيتم فتح وحدة التحكم في الشاشة وستعرض لك البيانات بما في ذلك قيم x وy وz الحالية للمنفذ النهائي وما إذا كان يتم الضغط على برج الإشارة. لاحظ أن قيم وحدة التحكم في الشاشة سيتم تحديثها في الوقت الفعلي أثناء تحريك الذراع ذي المحاور الستة يدويًا، كما هو موضح في الفيديو أدناه.
نشاط
الآن بعد أن تعلمت كيفية برمجة الذراع المكون من 6 محاور للتحرك على طول المحور z، سوف تمارس هذه المهارات. في هذا النشاط، سوف تقوم ببرمجة الذراع المكون من 6 محاور للتحرك على طول المحور z للعثور على الحد الأدنى والحد الأقصى لقيم z التي يمكن للذراع المكون من 6 محاور التحرك إليها.
- قم بإجراء تنبؤ بشأن الحد الأدنى والحد الأقصى لقيم z التي يمكن أن يتحرك إليها الذراع المكون من 6 محاور. قم بتسجيل القيم المتوقعة في دفتر الهندسة الخاص بك.
- باستخدام نفس المشروع أعلاه، قم قيم z في الكتلتين إلى قيمك المتوقعة.
- قم بتشغيل مشروعك لاختبار توقعاتك. تأكد من أن الذراع المكون من 6 محاور متصل بـ VEXcode.
- استمر في التنبؤ واختبار قيم z المختلفة. تأكد من تسجيل توقعاتك ونتائجك في دفتر الهندسة الخاص بك عند اختبار مشاريعك. ما هي القيم الدنيا والقصوى التي تجدها ؟
- قارن نتائجك مع القيم للمجموعات الأخرى. هل هما متشابهان أم مختلفان؟ ما هي المجموعة التي لها أكبر وأصغر قيمة؟ اختبر هذه القيم وقم بتعديل نتائجك إذا لزم الأمر.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم الموجودة في هذا الدرس من خلال الإجابة على الأسئلة الموجودة في المستند في دفتر الهندسة الخاص بك.
أسئلة التحقق من فهمك > (Google Doc / .docx / .pdf)
حدد التالي > لدمج مهاراتك في نشاط "وضع كل شيء معًا".