
Lição 5: Movimento autónomo ao longo do eixo Z
Nas lições anteriores, explorou os eixos x e y codificando o braço robótico de 6 eixos para se mover ao longo destes dois eixos.
Nesta lição, aprenderá sobre o eixo z e como codificar o braço de 6 eixos para se mover ao longo deste terceiro eixo.
No final desta lição, será capaz de codificar o braço de 6 eixos para se mover ao longo do eixo z, incluindo movimentos com múltiplos eixos a mudar ao mesmo tempo.
Introdução ao eixo Z
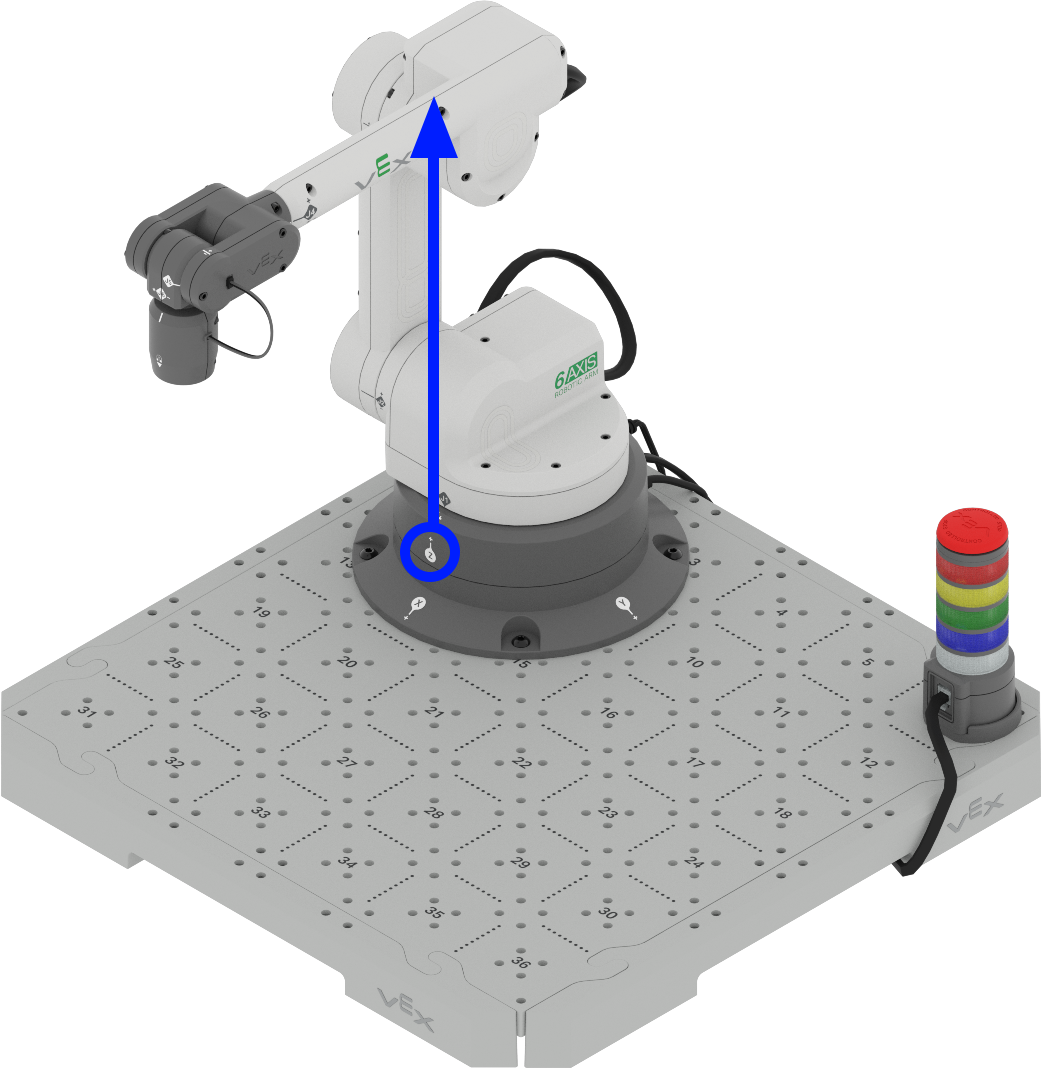
No sistema de coordenadas cartesianas, o eixo z representa o movimento vertical ou a altura.
Ao contrário dos eixos x e y, que normalmente correspondem a movimentos horizontais (esquerda-direita e para a frente-trás), o eixo z é perpendicular a ambos, movendo-se para cima e para baixo, como mostra este vídeo. Num ambiente industrial, este eixo vertical é crucial para tarefas que exijam elevação, abaixamento ou alcance de diferentes alturas.
No caso de um braço de 6 eixos, o eixo z controla o quão alto ou baixo o braço se estende. A precisão no movimento ao longo do eixo z é essencial para que o braço alcance alvos com precisão, evite obstáculos e execute operações delicadas, como mostra este vídeo.
Na fabricação, os robôs utilizam frequentemente o eixo z para colocar componentes numa correia
transportadora, empilhar artigos ou executar tarefas de montagem que exijam movimento vertical. Nos
armazéns, os sistemas robotizados utilizam o eixo z para recuperar ou armazenar artigos em diferentes
níveis de prateleiras.
Ao codificar movimentos no VEXcode, terá de considerar o eixo z para tarefas que envolvam levantar ou
baixar o braço de 6 eixos, como mostrado neste vídeo. Isto introduz uma camada adicional de
complexidade em comparação com os movimentos restritos aos eixos x e y, como viu nas Lições 3 e
4.
Neste videoclipe, o braço de 6 eixos começa na posição segura e depois move-se para apanhar o disco no local do bloco 18. Desloca-se para baixo no eixo z para engrenar o Disco e, em seguida, levanta o Disco ao longo do eixo z para se mover em segurança sobre os outros Discos do Bloco. O braço de 6 eixos move-se então sobre o local 33 do bloco e move-se para baixo no eixo z para soltar o disco em segurança no seu novo local.
Codificação do braço de 6 eixos ao longo do eixo Z
O eixo z pode ser utilizado de forma semelhante à forma como codificou os movimentos ao longo dos eixos x e y nas lições anteriores. Siga os passos abaixo para codificar o braço de 6 eixos para se mover ao longo do eixo z.
Abra o seu projeto guardado da Lição 4. Renomeie o projeto Altere os valores z e guarde-o no seu dispositivo.
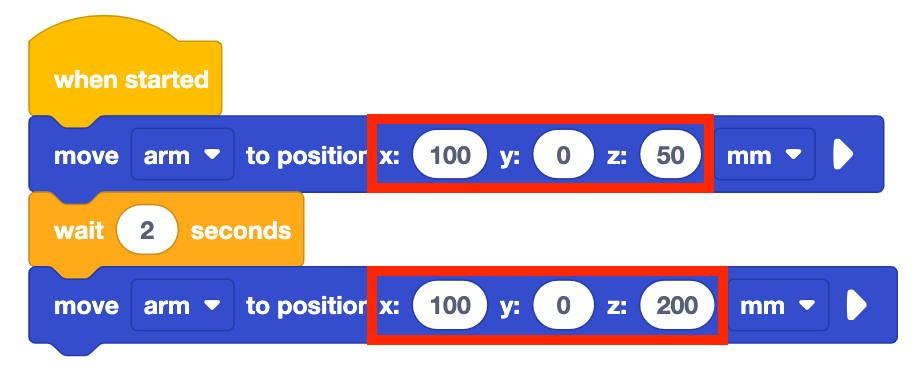
Altere os valores dos dois blocos Desloque-se para a posição para as seguintes coordenadas. Lembre-se que as coordenadas se escrevem como (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
O que acha que fará com que o braço de 6 eixos faça? Registe a sua previsão no seu caderno de engenharia.
Certifique-se de que o braço de 6 eixos está ligado ao VEXcode. Execute o projeto.
Observe o braço de 6 eixos enquanto se move ao longo do eixo z. Note que o braço de 6 eixos começará a mover-se para a posição segura (120, 0, 100) e, em seguida, executará os blocos no projeto.
Pare o projeto quando o braço de 6 eixos parar de se mover.
Registe as suas observações no seu caderno de engenharia. Como se moveu o braço de 6 eixos neste projeto? É semelhante ou diferente da sua previsão? Porquê?
Note que quando o valor z é alterado, o braço de 6 eixos estende-se e retrai-se ao longo do eixo z, como mostrado nesta animação.
Como se compara com o movimento do seu braço de 6 eixos neste projeto?
Para sua informação
Também pode combinar movimentos ao longo de vários eixos ao mesmo tempo, introduzindo uma coordenada (x, y, z) no bloco Mover para a posição.
Para encontrar a coordenada específica (x, y, z) de um local, pode utilizar o Monitor Console no VEXcode EXP. Para abrir a consola, seleccione o ícone Monitor Console no canto superior direito da barra de ferramentas.
O Monitor Console será aberto e mostrará dados, incluindo os valores atuais de x, y e z do efetor final e se a Torre de Sinalização está a ser premida. Note que os valores do Monitor Console serão atualizados em tempo real à medida que move manualmente o braço de 6 eixos, como mostrado no vídeo abaixo.
Atividade
Agora que aprendeu a codificar o braço de 6 eixos para se mover ao longo do eixo z, vai praticar estas competências. Nesta atividade, irá codificar o braço de 6 eixos para se mover ao longo do eixo z para encontrar os valores z mínimo e máximo para os quais o braço de 6 eixos se pode mover.
- Faça uma previsão para os valores z mínimo e máximo para os quais o braço de 6 eixos se pode mover. Registe os valores previstos no seu caderno de engenharia.
- Utilizando o mesmo projeto acima, altere os valores z nos blocos Mover para a posição para os seus valores previstos.
- Execute o seu projeto para testar as suas previsões. Certifique-se de que o seu braço de 6 eixos está ligado ao VEXcode.
- Continue a prever e a testar diferentes valores de z. Não se esqueça de registar as suas previsões e resultados no seu caderno de engenharia ao testar os seus projetos. Que valores mínimo e máximo de encontra?
- Compare os seus resultados com os valores de outros grupos. São semelhantes ou diferentes? Qual o grupo que tem os valores mais altos e mais baixos? Teste estes valores e ajuste os seus resultados, se necessário.
Verifique a sua compreensão
Antes de iniciar a lição seguinte, certifique-se de que compreende os conceitos desta lição respondendo às questões do documento abaixo no seu caderno de engenharia.
Questões para verificar a sua compreensão > (Google Doc / .docx / .pdf)
Selecione Seguinte > para combinar as suas competências na atividade Juntar Tudo.