
Lekce 5: Autonomní pohyb podél osy Z
V předchozích lekcích jste se zabývali osami x a y tím, že jste naprogramovali 6osé robotické rameno tak, aby se pohybovalo podél těchto dvou os.
V této lekci se dozvíte o ose z a o tom, jak naprogramovat 6osé rameno pro pohyb podél této třetí osy.
Do konce této lekce budete schopni naprogramovat 6osé rameno pro pohyb podél osy z, a to i s více osami měnícími se současně.

Úvod k ose Z
V kartézském souřadnicovém systému představuje osa z vertikální pohyb nebo výšku.
Na rozdíl od os x a y, které obvykle odpovídají horizontálním pohybům (doleva-doprava a dopředu-dozadu), je osa z kolmá k oběma a pohybuje se nahoru a dolů, jak je znázorněno v tomto videu. V průmyslovém prostředí je tato vertikální osa klíčová pro úkoly, které vyžadují zvedání, spouštění nebo dosahování v různých výškách.
V případě 6osého ramene určuje osa z, jak vysoko nebo nízko se rameno vysune. Přesnost pohybu podél osy z je pro rameno zásadní, aby přesně dosáhlo cílů, vyhýbalo se překážkám a provádělo jemné operace, jak je znázorněno v tomto videu.
Ve výrobě roboti často používají osu z k umisťování součástí na dopravní pás, stohování předmětů nebo provádění montážních úkolů, které vyžadují vertikální pohyb. Ve skladech robotické systémy využívají osu z k vyzvedávání nebo skladování položek na různých úrovních regálů.
Při kódování pohybů ve VEXcode budete muset u úkolů, které zahrnují zvedání nebo spouštění 6osého ramene, jak je znázorněno v tomto videu, zohlednit osu z. To zavádí další vrstvu složitosti ve srovnání s pohyby omezenými na osy x a y, jak jste viděli v lekcích 3 a 4.
V tomto videoklipu začíná 6osé rameno v bezpečné poloze a poté se přesune, aby zvedlo disk na dlaždici číslo 18. Pohybuje se dolů po ose z, aby se zapojil do disku, a poté disk zvedne podél osy z, aby se bezpečně přesunul přes ostatní disky na dlaždici. Šestiosé rameno se poté přesune nad umístění dlaždice 33 a posune se dolů podél osy z, aby bezpečně umístilo disk na jeho nové místo.
Kódování 6osého ramene podél osy Z
Osu z lze použít podobně, jako jste v předchozích lekcích kódovali pohyby podél os x a y. Postupujte podle níže uvedených kroků a naprogramujte 6osé rameno tak, aby se pohybovalo podél osy z.
Otevřete si uložený projekt z lekce 4. Přejmenujte projekt na Změňte hodnoty za uložte jej do zařízení.
Změňte hodnoty dvou bloků Move to position na následující souřadnice. Nezapomeňte, že souřadnice se zapisují jako (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
Co si myslíte, že to způsobí, že 6osé rameno udělá? Zaznamenejte si svou předpověď do svého technického sešitu.

Ujistěte se, že je 6osé rameno připojeno k VEXcode. Spusťte projekt.
Pozorujte 6osé rameno, jak se pohybuje podél osy z. Všimněte si, že 6osé rameno se nejprve přesune do bezpečné polohy (120, 0, 100) a poté provede bloky v projektu.
Jakmile se 6osé rameno zastaví, zastavte projekt.
Svá pozorování si zaznamenejte do technického sešitu. Jak se v tomto projektu pohybovalo 6osé rameno? Je to podobné, nebo odlišné od vaší předpovědi? Proč?
Všimněte si, že když se změní hodnota z, šestiosé rameno se vysouvá a zasouvá podél osy z, jak je znázorněno v této animaci.
Jak se to srovnává s pohybem vašeho 6osého ramene v tomto projektu?
Pro vaši informaci
Pohyby podél více os můžete také kombinovat najednou vložením souřadnice (x, y, z) do bloku Přesunout do pozice.
Pro nalezení konkrétní souřadnice (x, y, z) polohy můžete použít konzoli Monitor ve VEXcode EXP. Chcete-li otevřít konzoli, vyberte ikonu Monitor Console v pravém horním rohu panelu nástrojů.
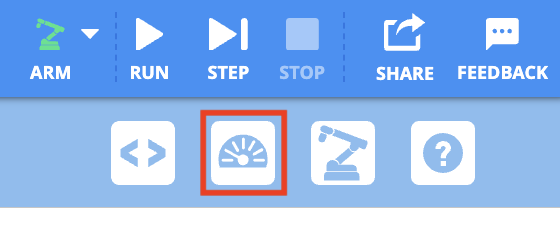
Otevře se konzole Monitor a zobrazí se vám data včetně aktuálních hodnot x, y a z koncového efektoru a informace o tom, zda je stisknuta signální věž. Všimněte si, že hodnoty monitorovací konzole se budou aktualizovat v reálném čase, jak budete ručně pohybovat 6osým ramenem, jak je znázorněno ve videu níže.
Aktivita
Nyní, když jste se naučili, jak naprogramovat 6osé rameno pro pohyb podél osy z, si tyto dovednosti procvičíte. V tomto cvičení naprogramujete 6osé rameno tak, aby se pohybovalo podél osy z a nacházelo minimální a maximální hodnoty z, na které se 6osé rameno může pohybovat.
- Předpovězte minimální a maximální hodnoty z, na které se může 6osé rameno pohybovat. Zaznamenejte si předpokládané hodnoty do svého technického sešitu.
- Pomocí stejného projektu z výše uvedeného příkladu změňte hodnoty z v blocích Move to positionna předpokládané hodnoty.
- Spusťte svůj projekt a ověřte si své předpovědi. Ujistěte se, že je vaše 6osé rameno připojeno k VEXcode.
- Pokračujte v predikci a testování různých hodnot z. Při testování projektů si nezapomeňte zaznamenat své předpovědi a výsledky do svého inženýrského sešitu. Jaké minimální a maximální hodnoty nacházíte?
- Porovnejte své výsledky s hodnotami ostatních skupin. Jsou si podobné, nebo odlišné? Která skupina má největší a nejmenší hodnoty? Otestujte tyto hodnoty a v případě potřeby upravte výsledky.
Ověřte si své znalosti
Než začnete s další lekci, ujistěte se, že rozumíte konceptům v této lekci, a to zodpovězením otázek v níže uvedeném dokumentu ve svém technickém sešitě.
Otázky k prověření vašich znalostí > (dokument Google / .docx / .pdf)
Vyberte Další > a zkombinujte své dovednosti v aktivitě Dávení všeho dohromady.