
Lección 5: Movimiento autónomo a lo largo del eje Z
En las lecciones anteriores, exploró los ejes x e y codificando el brazo robótico de 6 ejes para moverse a lo largo de esos dos ejes.
En esta lección, aprenderá sobre el eje z y cómo codificar el brazo de 6 ejes para moverse a lo largo de este tercer eje.
Al final de esta lección, podrá codificar el brazo de 6 ejes para que se mueva a lo largo del eje z, incluido el movimiento con múltiples ejes cambiando al mismo tiempo.
Introducción al eje Z
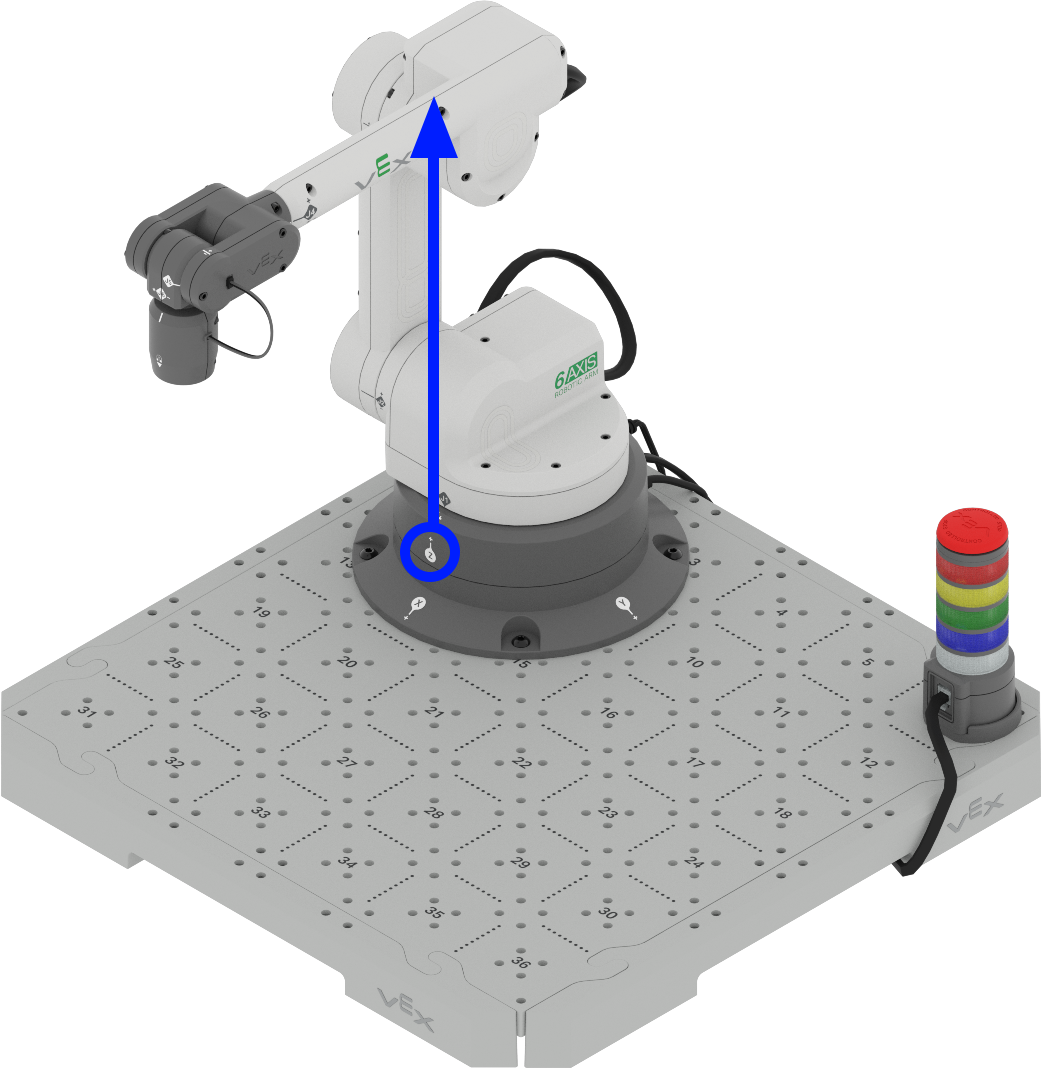
En el sistema de coordenadas cartesianas, el eje z representa el movimiento vertical o altura.
A diferencia de los ejes x e y, que normalmente corresponden a movimientos horizontales (izquierda-derecha y adelante-atrás), el eje z es perpendicular a ambos, moviéndose hacia arriba y hacia abajo como se muestra en este vídeo. En un entorno industrial, este eje vertical es crucial para tareas que requieren levantar, bajar o alcanzar diferentes alturas.
En el caso de un brazo de 6 ejes, el eje z controla qué tan alto o bajo se extiende el brazo. La precisión al moverse a lo largo del eje z es fundamental para que el brazo alcance los objetivos con precisión, evite obstáculos y realice operaciones delicadas como se muestra en este vídeo.
En la fabricación, los robots a menudo utilizan el eje z para colocar componentes en una cinta
transportadora, apilar artículos o realizar tareas de ensamblaje que requieren movimiento vertical. En
los almacenes, los sistemas robóticos utilizan el eje z para recuperar o almacenar artículos en
diferentes niveles de estantes.
Al codificar movimientos en VEXcode, deberá considerar el eje z para las tareas que implican levantar
o bajar el brazo de 6 ejes como se muestra en este video. Esto introduce una capa adicional de
complejidad en comparación con los movimientos restringidos a los ejes x e y, como vio en las
lecciones 3 y 4.
En este videoclip, el brazo de 6 ejes comienza en la posición segura y luego se mueve para recoger el disco en la ubicación del mosaico 18. Se mueve hacia abajo sobre el eje z para acoplarse al disco, luego levanta el disco a lo largo del eje z para moverse de manera segura sobre los otros discos en el mosaico. Luego, el brazo de 6 ejes se mueve sobre la ubicación del mosaico 33 y se mueve hacia abajo en el eje z para colocar el disco de manera segura en su nueva ubicación.
Codificación del brazo de 6 ejes a lo largo del eje Z
El eje z se puede utilizar de forma similar a como ha estado codificando movimientos a lo largo de los ejes x e y en lecciones anteriores. Siga los pasos a continuación para codificar el brazo de 6 ejes para que se mueva a lo largo del eje z.
Abra el proyecto guardado de la Lección 4. Cambie el nombre del proyecto Cambie los valores z y guárdelo en su dispositivo.
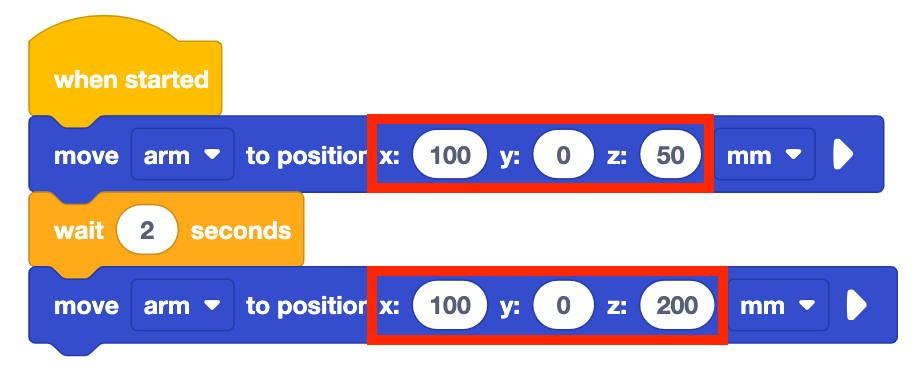
Cambie los valores de los dos bloques Mover a la posición a las siguientes coordenadas. Recuerde que las coordenadas se escriben como (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
¿Qué crees que esto provocará en el brazo de 6 ejes? Registra tu predicción en tu cuaderno de ingeniería.
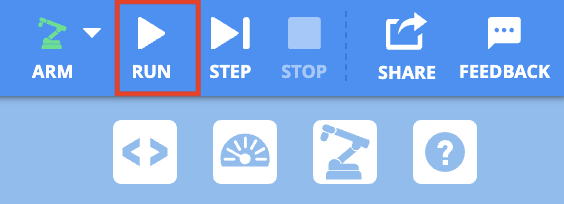
Asegúrese de que el brazo de 6 ejes esté conectado a VEXcode. Ejecutar el proyecto.
Observe el brazo de 6 ejes mientras se mueve a lo largo del eje z. Tenga en cuenta que el brazo de 6 ejes comenzará a moverse a la posición segura (120, 0, 100) y luego ejecutará los bloques en el proyecto.
Detenga el proyecto una vez que el brazo de 6 ejes haya dejado de moverse.
Registra tus observaciones en tu cuaderno de ingeniería. ¿Cómo se movió el brazo de 6 ejes en este proyecto? ¿Es similar o diferente a tu predicción? ¿Por qué?
Observe que cuando se cambia el valor z, el brazo de 6 ejes se extiende y se retrae a lo largo del eje z, como se muestra en esta animación.
¿Cómo se compara esto con el movimiento de su brazo de 6 ejes en este proyecto?
Para tu información
También puedes combinar movimientos a lo largo de varios ejes a la vez insertando una coordenada (x, y, z) en el bloque Mover a la posición.
Para encontrar la coordenada específica (x, y, z) de una ubicación, puede utilizar la Consola del monitor en VEXcode EXP. Para abrir la consola, seleccione el ícono de la Consola del monitor en la esquina superior derecha de la barra de herramientas.
Se abrirá la consola del monitor y le mostrará datos que incluyen los valores x, y y z actuales del efector final y si se está presionando la torre de señales. Tenga en cuenta que los valores de la consola del monitor se actualizarán en tiempo real a medida que mueva manualmente el brazo de 6 ejes, como se muestra en el video a continuación.
Actividad
Ahora que ha aprendido a codificar el brazo de 6 ejes para que se mueva a lo largo del eje z, practicará estas habilidades. En esta actividad, codificará el brazo de 6 ejes para que se mueva a lo largo del eje z para encontrar los valores z mínimos y máximos a los que puede moverse el brazo de 6 ejes.
- Haga una predicción de los valores z mínimos y máximos a los que puede moverse el brazo de 6 ejes. Registre los valores previstos en su cuaderno de ingeniería.
- Usando el mismo proyecto de arriba, los valores z en los bloques valores predichos.
- Ejecute su proyecto para probar sus predicciones. Asegúrese de que su brazo de 6 ejes esté conectado a VEXcode.
- Continúe prediciendo y probando diferentes valores z. Asegúrese de registrar sus predicciones y resultados en su cuaderno de ingeniería cuando pruebe sus proyectos. ¿Qué valores mínimos y encuentras?
- Compare sus resultados con los valores de otros grupos. ¿Son similares o diferentes? ¿Qué grupo tiene los valores más grandes y más pequeños? Pruebe esos valores y ajuste los resultados si es necesario.
Comprueba tu comprensión
Antes de comenzar la siguiente lección, asegúrese de comprender los conceptos de esta lección respondiendo las preguntas del documento a continuación en su cuaderno de ingeniería.
Preguntas para comprobar su comprensión > (Google Doc / .docx / .pdf)
Selecciona Siguiente > para combinar tus habilidades en la actividad Poniéndolo todo junto.