
Lezione 5: Movimento autonomo lungo l'asse Z
Nelle lezioni precedenti hai esplorato gli assi x e y programmando il braccio robotico a 6 assi affinché si muova lungo questi due assi.
In questa lezione imparerai a conoscere l'asse z e come programmare il braccio a 6 assi per muoversi lungo questo terzo asse.
Al termine di questa lezione, sarai in grado di programmare il braccio a 6 assi in modo che si muova lungo l'asse z, incluso lo spostamento con più assi che cambiano contemporaneamente.
Introduzione all'asse Z
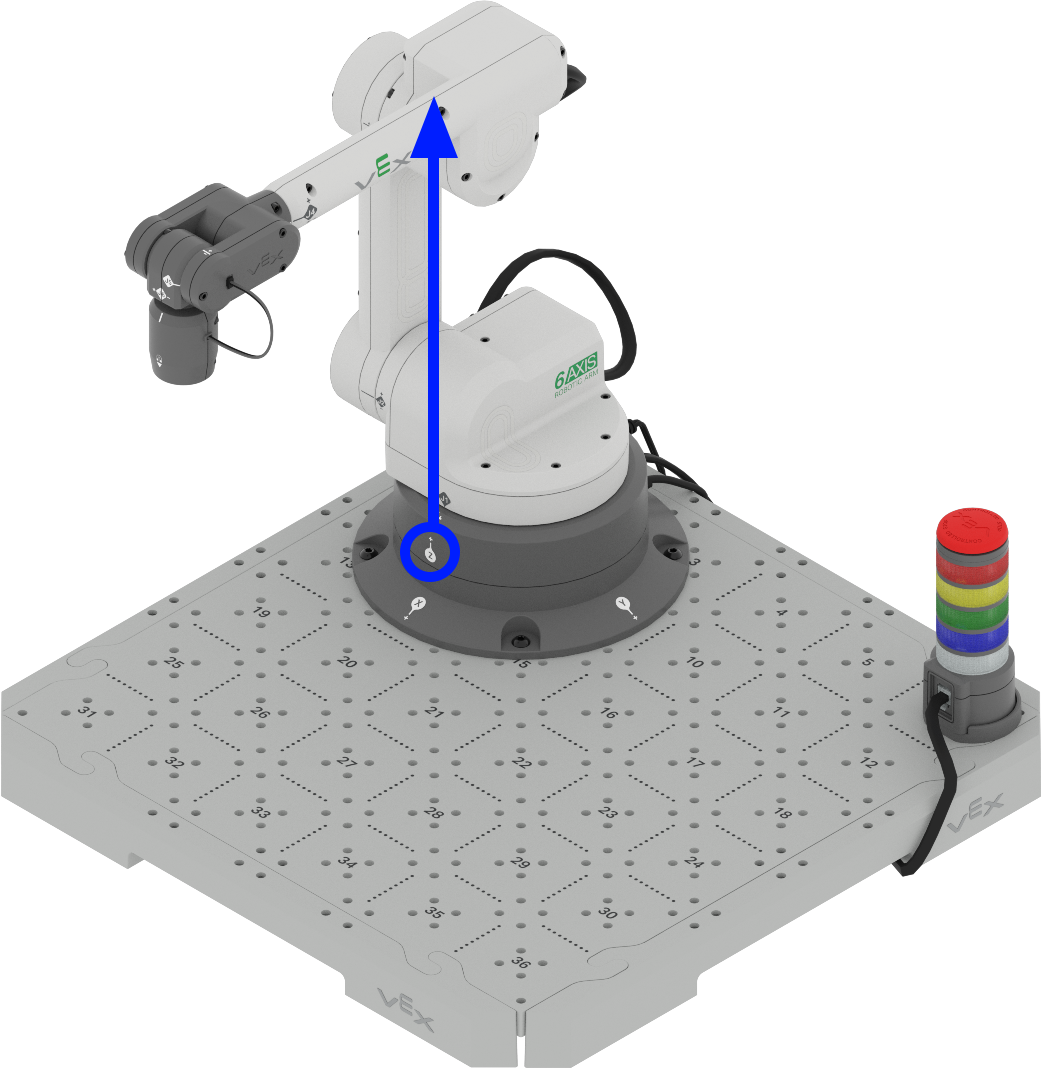
Nel sistema di coordinate cartesiano, l'asse z rappresenta il movimento verticale o l'altezza.
A differenza degli assi x e y, che in genere corrispondono a movimenti orizzontali (sinistra-destra e avanti-indietro), l'asse z è perpendicolare a entrambi e si muove verso l'alto e verso il basso, come mostrato in questo video. In un contesto industriale, questo asse verticale è fondamentale per le attività che richiedono di sollevare, abbassare o raggiungere altezze diverse.
Nel caso di un braccio a 6 assi, l'asse Z controlla quanto in alto o in basso si estende il braccio. La precisione nel movimento lungo l'asse z è fondamentale affinché il braccio possa raggiungere con precisione i bersagli, evitare gli ostacoli ed eseguire operazioni delicate, come mostrato in questo video.
Nell'industria manifatturiera, i robot utilizzano spesso l'asse Z per posizionare componenti su un
nastro trasportatore, impilare articoli o eseguire attività di assemblaggio che richiedono un
movimento verticale. Nei magazzini, i sistemi robotici sfruttano l'asse Z per prelevare o
immagazzinare articoli su diversi livelli di scaffali.
Quando si codificano i movimenti in VEXcode, sarà necessario considerare l'asse z per le attività che
comportano il sollevamento o l'abbassamento del braccio a 6 assi, come mostrato in questo video. Ciò
introduce un ulteriore livello di complessità rispetto ai movimenti limitati agli assi x e y, come
visto nelle lezioni 3 e 4.
In questa clip video, il braccio a 6 assi inizia in posizione sicura, quindi si muove per raccogliere il disco nella posizione Tile 18. Si sposta verso il basso lungo l'asse z per agganciare il disco, quindi solleva il disco lungo l'asse z per spostarlo in sicurezza sopra gli altri dischi sulla tessera. Il braccio a 6 assi si sposta quindi sulla posizione 33 della tessera e si sposta verso il basso lungo l'asse z per rilasciare in sicurezza il disco nella sua nuova posizione.
Codifica del braccio a 6 assi lungo l'asse Z
L'asse z può essere utilizzato in modo simile a come hai codificato i movimenti lungo gli assi x e y nelle lezioni precedenti. Seguire i passaggi sottostanti per codificare il braccio a 6 assi in modo che si muova lungo l'asse z.
Apri il progetto salvato nella Lezione 4. Rinomina il progetto Modifica i valori z e salvalo sul tuo dispositivo.
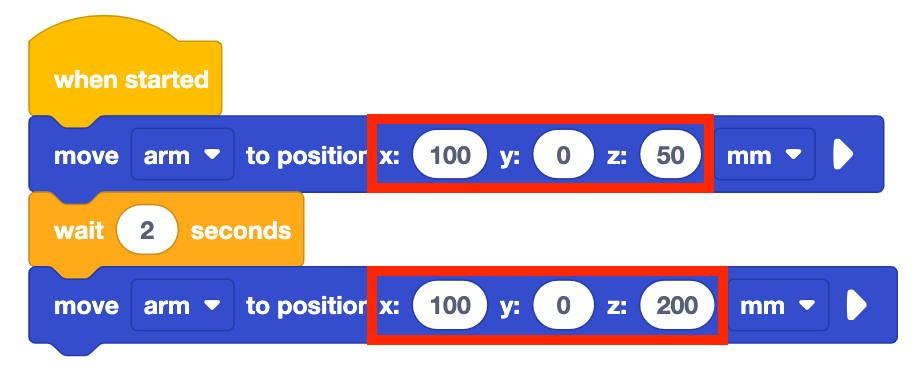
Modifica i valori dei due blocchi Sposta in posizione con le seguenti coordinate. Ricorda che le coordinate si scrivono come (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
Secondo te, cosa comporterà questo braccio a 6 assi? Annota la tua previsione nel tuo quaderno di progettazione.
Assicurarsi che il braccio a 6 assi sia collegato a VEXcode. Esegui il progetto.
Osservare il braccio a 6 assi mentre si muove lungo l'asse z. Si noti che il braccio a 6 assi inizierà spostandosi nella posizione sicura (120, 0, 100), quindi eseguirà i blocchi nel progetto.
Interrompere il progetto una volta che il braccio a 6 assi ha smesso di muoversi.
Annota le tue osservazioni sul tuo quaderno di progettazione. Come si è mosso il braccio a 6 assi in questo progetto? È simile o diverso dalla tua previsione? Perché?
Si noti che quando si modifica il valore z, il braccio a 6 assi si estende e si ritrae lungo l'asse z, come mostrato in questa animazione.
Come si confronta con il movimento del tuo braccio a 6 assi in questo progetto?
Per vostra informazione
È anche possibile combinare i movimenti lungo più assi contemporaneamente inserendo una coordinata (x, y, z) nel blocco Sposta nella posizione.
Per trovare le coordinate specifiche (x, y, z) di una posizione, è possibile utilizzare la Monitor Console in VEXcode EXP. Per aprire la console, selezionare l'icona Monitor Console nell'angolo in alto a destra della barra degli strumenti.
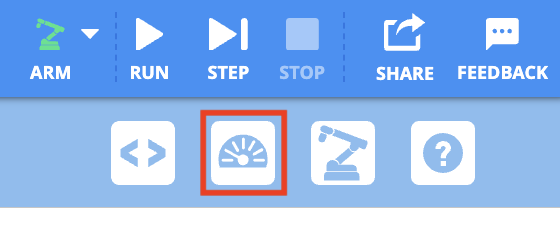
La console del monitor si aprirà e mostrerà i dati, inclusi i valori x, y e z correnti dell'effettore finale e se la torre di segnalazione è premuta. Si noti che i valori della console del monitor verranno aggiornati in tempo reale mentre si sposta manualmente il braccio a 6 assi, come mostrato nel video qui sotto.
Attività
Ora che hai imparato come programmare il braccio a 6 assi per muoversi lungo l'asse z, metterai in pratica queste competenze. In questa attività, programmerai il braccio a 6 assi in modo che si muova lungo l'asse z per trovare i valori z minimi e massimi a cui il braccio a 6 assi può muoversi.
- Effettuare una previsione dei valori z minimi e massimi a cui può muoversi il braccio a 6 assi. Registra i valori previsti nel tuo quaderno di progettazione.
- Utilizzando lo stesso progetto di cui sopra, modifica i valori z nei blocchi Sposta in posizione in i valori previsti.
- Esegui il progetto per testare le tue previsioni. Assicurati che il tuo braccio a 6 assi sia connesso a VEXcode.
- Continuare a prevedere e testare diversi valori z. Quando testi i tuoi progetti, assicurati di registrare le tue previsioni e i risultati nel tuo quaderno di progettazione. Quali valori minimi e massimi trovi?
- Confronta i tuoi risultati con i valori degli altri gruppi. Sono simili o diversi? Quale gruppo ha i valori più grandi e più piccoli? Prova questi valori e modifica i risultati se necessario.
Controlla la tua comprensione
Prima di iniziare la lezione successiva, assicurati di aver compreso i concetti di questa lezione rispondendo alle domande nel documento sottostante nel tuo quaderno di .
Domande di verifica della comprensione > (Google Doc / .docx / .pdf)
Seleziona Avanti > per combinare le tue competenze nell'attività Mettere tutto insieme.