
Les 5: Autonome beweging langs de Z-as
In de voorgaande lessen hebt u de x- en y-assen verkend door de 6-assige robotarm te programmeren, zodat deze langs deze twee assen kan bewegen.
In deze les leert u over de z-as en hoe u de 6-assige arm programmeert zodat deze langs deze derde as beweegt.
Aan het einde van deze les kunt u de 6-assige arm programmeren zodat deze langs de z-as kan bewegen, inclusief het tegelijkertijd veranderen van meerdere assen.

Inleiding tot de Z-as
In het cartesiaanse coördinatenstelsel vertegenwoordigt de z-as de verticale beweging of hoogte.
In tegenstelling tot de x- en y-assen, die normaal gesproken overeenkomen met horizontale bewegingen (links-rechts en vooruit-achteruit), staat de z-as loodrecht op beide assen en beweegt hij omhoog en omlaag, zoals in deze video wordt getoond. In een industriële omgeving is deze verticale as essentieel voor taken waarbij tillen, neerzetten of reiken op verschillende hoogtes nodig is.
Bij een 6-assige arm bepaalt de z-as hoe hoog of laag de arm uitschuift. De nauwkeurigheid bij het bewegen langs de z-as is van cruciaal belang om ervoor te zorgen dat de arm doelen nauwkeurig bereikt, obstakels ontwijkt en delicate handelingen uitvoert, zoals in deze video wordt getoond.
In de productie maken robots vaak gebruik van de z-as om onderdelen op een transportband te plaatsen, artikelen te stapelen of assemblagetaken uit te voeren waarbij verticale bewegingen nodig zijn. In magazijnen maken robotsystemen gebruik van de z-as om artikelen op verschillende schapniveaus op te halen of op te slaan.
Bij het coderen van bewegingen in VEXcode moet u rekening houden met de z-as voor taken waarbij de 6-assige arm moet worden opgetild of neergelaten, zoals in deze video wordt getoond. Dit introduceert een extra laag van complexiteit vergeleken met bewegingen die beperkt zijn tot de x- en y-assen, zoals u zag in les 3 en 4.
In deze videoclip begint de 6-assige arm in de veilige positie en beweegt vervolgens om de schijf op tegellocatie 18 op te pakken. Hij beweegt omlaag langs de z-as om de schijf te grijpen en tilt de schijf vervolgens omhoog langs de z-as, zodat hij veilig over de andere schijven op de tegel kan bewegen. Vervolgens beweegt de 6-assige arm over tegellocatie 33 en beweegt naar beneden over de z-as om de schijf veilig op de nieuwe locatie neer te zetten.
Coderen van de 6-assige arm langs de Z-as
De z-as kan op dezelfde manier worden gebruikt als de manier waarop u in eerdere lessen bewegingen langs de x- en y-as hebt gecodeerd. Volg de onderstaande stappen om de 6-assige arm te programmeren zodat deze langs de z-as beweegt.
Open uw opgeslagen project uit Les 4. Hernoem het project wijzig de z-waardenen sla het op uw apparaat op.
Wijzig de waarden van de twee Verplaats naar positie blokken naar de volgende coördinaten. Onthoud dat coördinaten worden geschreven als (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
Wat denk je dat dit met de 6-assige arm zal doen? Noteer uw voorspelling in uw technisch notitieboekje.

Zorg ervoor dat de 6-assige arm is aangesloten op VEXcode. Voer het project uit.
Observeer de 6-assige arm terwijl deze langs de z-as beweegt. Merk op dat de 6-assige arm eerst naar de veilige positie (120, 0, 100) beweegt en vervolgens de blokken in het project uitvoert.
Stop het project zodra de 6-assige arm niet meer beweegt.
Noteer uw observaties in uw technisch notitieboekje. Hoe bewoog de 6-assige arm in dit project? Is het vergelijkbaar of anders met uw voorspelling? Waarom?
Let op: wanneer de z-waarde wordt gewijzigd, wordt de 6-assige arm langs de z-as uit- en ingetrokken, zoals weergegeven in deze animatie.
Hoe verhoudt zich dat tot de beweging van uw 6-assige arm in dit project?
Ter informatie
U kunt ook bewegingen langs meerdere assen tegelijk combineren door een (x, y, z)-coördinaat in het blok Verplaats naar positie in te voegen.
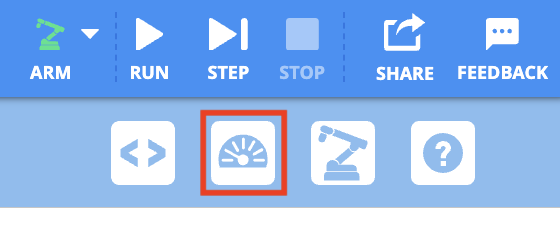
Om de specifieke (x, y, z) coördinaat van een locatie te vinden, kunt u de Monitor Console in VEXcode EXP gebruiken. Om de console te openen, selecteert u het pictogram Monitor Console in de rechterbovenhoek van de werkbalk.
De Monitor Console wordt geopend en toont u gegevens, waaronder de huidige x-, y- en z-waarden van de eind-effector en of de signaaltoren wordt ingedrukt. Houd er rekening mee dat de waarden van de Monitor Console in realtime worden bijgewerkt wanneer u de 6-assige arm handmatig beweegt, zoals u in de onderstaande video kunt zien.
Activiteit
Nu u hebt geleerd hoe u de 6-assige arm kunt programmeren om langs de z-as te bewegen, gaat u deze vaardigheden oefenen. In deze activiteit programmeert u de 6-assige arm zodat deze langs de z-as beweegt om de minimale en maximale z-waarden te vinden waarnaar de 6-assige arm kan bewegen.
- Doe een voorspelling voor de minimale en maximale z-waarden waarnaar de 6-assige arm kan bewegen. Noteer de voorspelde waarden in uw technisch notitieboekje.
- Wijzig, met behulp van hetzelfde project als hierboven, de z-waarden in de blokken Verplaats naar positienaar uw voorspelde waarden.
- Voer uw project uit om uw voorspellingen te testen. Zorg ervoor dat uw 6-assige arm is aangesloten op VEXcode.
- Blijf verschillende z-waarden voorspellen en testen. Zorg ervoor dat u uw voorspellingen en resultaten vastlegt in uw technische notitieboekje wanneer u uw projecten test. Welke minimum- en maximumwaarden vindt u?
- Vergelijk uw resultaten met de waarden van andere groepen. Zijn ze vergelijkbaar of verschillend? Welke groep heeft de grootste en kleinste waarden? Test deze waarden en pas uw resultaten indien nodig aan.
Controleer uw begrip
Voordat u met de volgende les begint, moet u ervoor zorgen dat u de concepten in deze les begrijpt door de vragen in het onderstaande document in uw technische notitieboekje te beantwoorden.
Controleer uw begrip vragen > (Google Doc / .docx / .pdf)
Selecteer Volgende > om jullie vaardigheden te combineren in de activiteit Alles bij elkaar brengen.