
บทที่ 5: การเคลื่อนที่อัตโนมัติตามแกน Z
ในบทเรียนก่อนหน้านี้ คุณได้สำรวจแกน x และ y โดยการเขียนโค้ดแขนหุ่นยนต์ 6 แกนให้เคลื่อนที่ไปตามแกนทั้งสองนี้
ในบทเรียนนี้ คุณจะได้เรียนรู้เกี่ยวกับแกน z และวิธีการเขียนโค้ดแขน 6 แกนเพื่อเคลื่อนที่ไปตามแกนที่สามนี้
เมื่อสิ้นสุดบทเรียนนี้ คุณจะสามารถเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน z ได้ รวมถึงเคลื่อนที่ด้วยแกนหลายแกนที่เปลี่ยนในเวลาเดียวกันได้
บทนำเกี่ยวกับแกน Z
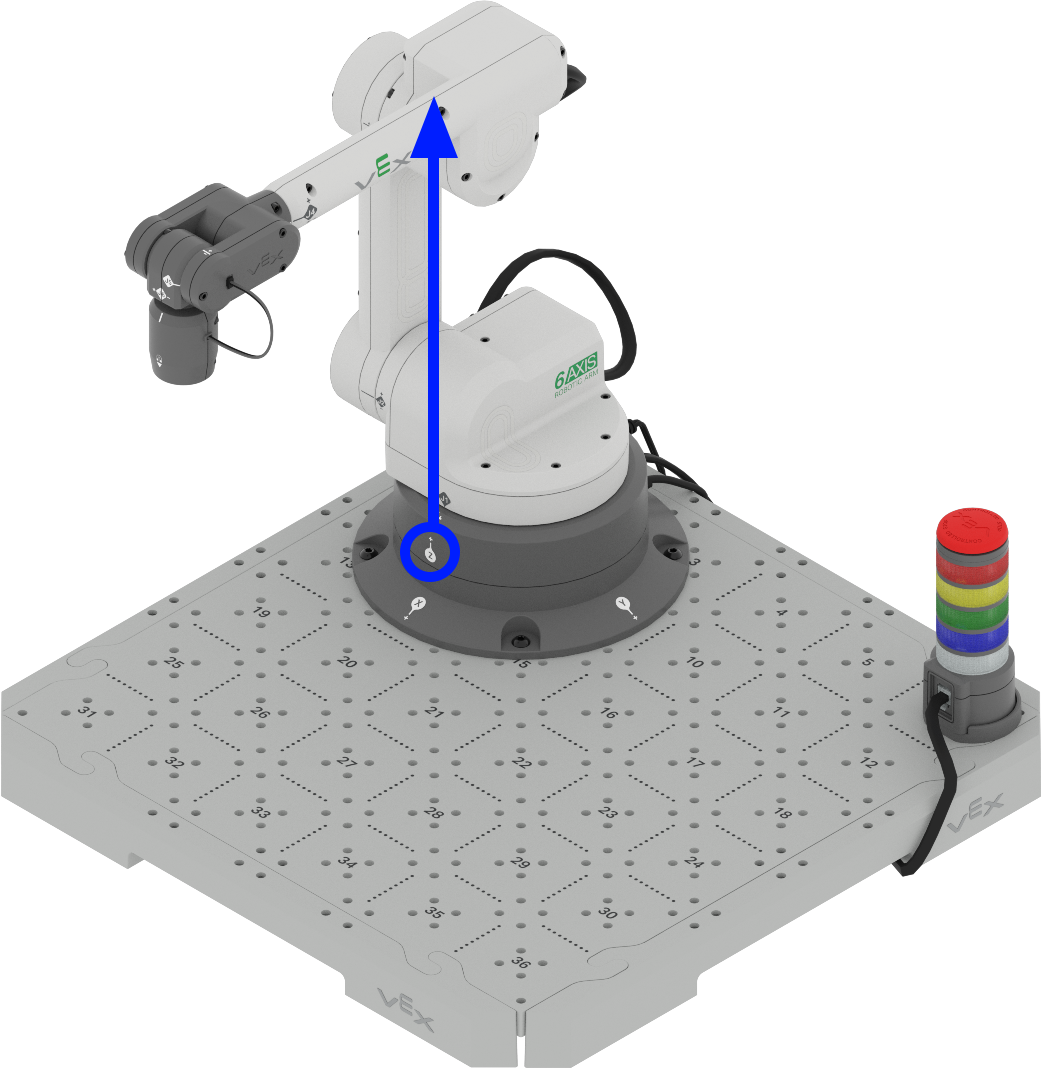
ในระบบพิกัดคาร์เทเชียน แกน z แสดงถึงการเคลื่อนที่ในแนวตั้งหรือความสูง
ต่างจากแกน x และ y ซึ่งโดยทั่วไปจะสอดคล้องกับการเคลื่อนที่ในแนวนอน (ซ้าย-ขวา และไปข้างหน้า-ข้างหลัง) แกน z จะตั้งฉากกับทั้งคู่ โดยเคลื่อนที่ขึ้นและลงตามที่แสดงในวิดีโอนี้ ในสถานประกอบการอุตสาหกรรม แกนแนวตั้งนี้มีความสำคัญสำหรับงานที่ต้องยก ลด หรือเอื้อมที่ความสูงต่างกัน
ในกรณีของแขน 6 แกน แกน z จะควบคุมความสูงหรือต่ำของแขนที่ยื่นออกมา ความแม่นยำในการเคลื่อนที่ตามแกน z มีความสำคัญอย่างยิ่งเพื่อให้แขนสามารถเข้าถึงเป้าหมาย หลีกเลี่ยงสิ่งกีดขวาง และดำเนินการที่ละเอียดอ่อนตามที่แสดงในวิดีโอนี้
ในการผลิต หุ่นยนต์มักใช้แกน z ในการวางส่วนประกอบบนสายพานลำเลียง จัดเรียงสินค้า
หรือดำเนินการประกอบที่ต้องมีการเคลื่อนที่แนวตั้ง ในคลังสินค้า ระบบหุ่นยนต์จะใช้แกน z
เพื่อหยิบหรือจัดเก็บสินค้าบนชั้นวางที่แตกต่างกัน
เมื่อทำการเข้ารหัสการเคลื่อนไหวใน VEXcode คุณจะต้องพิจารณาแกน z
สำหรับงานที่เกี่ยวข้องกับการยกหรือลดแขน 6 แกน ดังที่แสดงในวิดีโอนี้
สิ่งนี้จะเพิ่มชั้นความซับซ้อนเพิ่มเติมเมื่อเทียบกับการเคลื่อนไหวที่จำกัดเฉพาะแกน x และ y
ตามที่คุณเห็นในบทที่ 3 และ 4
ในคลิปวิดีโอนี้ แขน 6 แกนเริ่มต้นในตำแหน่งปลอดภัย จากนั้นเคลื่อนที่ไปหยิบดิสก์บนตำแหน่งไทล์ 18 เคลื่อนลงบนแกน z เพื่อยึดดิสก์ จากนั้นยกดิสก์ขึ้นตามแนวแกน z เพื่อเคลื่อนตัวอย่างปลอดภัยเหนือดิสก์อื่นๆ บนไทล์ จากนั้นแขน 6 แกนจะเคลื่อนที่ผ่านตำแหน่งไทล์ 33 และเคลื่อนที่ลงบนแกน z เพื่อวางดิสก์ในตำแหน่งใหม่อย่างปลอดภัย
การเข้ารหัสแขน 6 แกนตามแกน Z
แกน z สามารถใช้ได้ในลักษณะเดียวกับที่คุณเขียนโค้ดการเคลื่อนไหวไปตามแกน x และ y ไว้ในบทเรียนก่อนหน้า ทำตามขั้นตอนต่อไปนี้เพื่อเขียนโค้ดแขน 6 แกนให้เคลื่อนไปตามแกน z
เปิดโครงการที่คุณบันทึกไว้จากบทเรียนที่ 4 เปลี่ยนชื่อโครงการ เปลี่ยนค่า z เป็น และบันทึกลงในอุปกรณ์ของคุณ
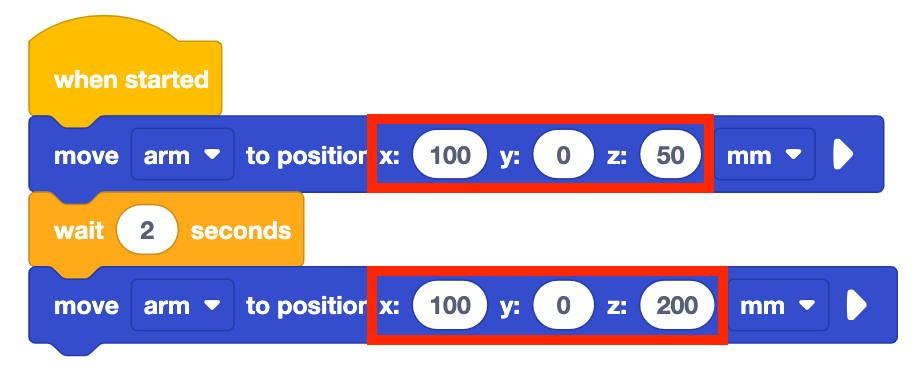
เปลี่ยนค่าของ ทั้งสองตัวไปที่ตำแหน่ง ของบล็อคตามพิกัดต่อไปนี้ จำไว้ว่าพิกัดเขียนเป็น (x, y, z)
- (100, 0, 50)
- (100, 0, 200)
คุณคิดว่าสิ่งนี้จะส่งผลให้ 6-Axis Arm ทำอะไรได้บ้าง? บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode ดำเนินโครงการ
สังเกตแขน 6 แกนขณะเคลื่อนที่ไปตามแกน z สังเกตว่าแขน 6 แกนจะเริ่มต้นด้วยการเคลื่อนไปยังตำแหน่งปลอดภัย (120, 0, 100) จากนั้นจะดำเนินการบล็อกในโครงการ
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนที่
บันทึกการสังเกตของคุณลงในสมุดบันทึกวิศวกรรมของคุณ แขน 6 แกนเคลื่อนไหวอย่างไรในโปรเจ็กต์นี้? มันเหมือนหรือแตกต่างกับคำทำนายของคุณหรือเปล่า? ทำไม?
สังเกตว่าเมื่อเปลี่ยนค่า z แขน 6 แกนจะขยายและหดกลับไปตามแกน z ดังที่แสดงในแอนิเมชันนี้
เมื่อเทียบกับการเคลื่อนไหวของแขน 6 แกนในโปรเจ็กต์นี้แล้วเป็นอย่างไรบ้าง?
เพื่อเป็นข้อมูลของคุณ
คุณสามารถรวมการเคลื่อนไหวตามแกนหลายแกนได้ในคราวเดียว โดยการแทรกพิกัด (x, y, z) ในบล็อก ย้ายไปยังตำแหน่ง
เพื่อค้นหาพิกัด (x, y, z) ที่เฉพาะเจาะจงของตำแหน่ง คุณสามารถใช้ Monitor Console ใน VEXcode EXP เมื่อต้องการเปิดคอนโซล ให้เลือกไอคอน Monitor Console ที่มุมบนขวาของแถบเครื่องมือ
Monitor Console จะเปิดขึ้นและแสดงข้อมูลรวมทั้งค่า x, y และ z ปัจจุบันของเอฟเฟกเตอร์สุดท้าย และดูว่ากำลังกดเสาสัญญาณอยู่หรือไม่ โปรดทราบว่าค่า Monitor Console จะอัปเดตแบบเรียลไทม์ขณะที่คุณขยับแขน 6 แกนด้วยตนเอง ดังที่แสดงในวิดีโอด้านล่าง
กิจกรรม
ตอนนี้คุณได้เรียนรู้วิธีการเขียนโปรแกรมแขน 6 แกนเพื่อเคลื่อนที่ตามแกน z แล้ว คุณก็จะฝึกฝนทักษะเหล่านี้ได้ ในกิจกรรมนี้ คุณจะเขียนโค้ดแขน 6 แกนให้เคลื่อนที่ไปตามแกน z เพื่อหาค่า z ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนที่ไปได้
- ทำนายค่า z ต่ำสุดและสูงสุดที่แขน 6 แกนสามารถเคลื่อนไปได้ บันทึกค่าที่คาดการณ์ไว้ในสมุดบันทึกวิศวกรรมของคุณ
- ใช้โครงการเดียวกันจากด้านบน เปลี่ยนค่า z จาก ในการย้ายจากบล็อก ไปยังตำแหน่ง เป็น ตามค่าที่คุณคาดการณ์ไว้
- รันโครงการของคุณเพื่อทดสอบการทำนายของคุณ ตรวจสอบให้แน่ใจว่า Arm 6 แกนของคุณเชื่อมต่อกับ VEXcode
- ดำเนินการคาดการณ์และทดสอบค่า z ต่างๆ ต่อไป อย่าลืมบันทึกคำทำนายและผลลัพธ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณเมื่อทำการทดสอบโครงการของคุณ คุณพบค่าต่ำสุดและค่าสูงสุดเท่าไร
- เปรียบเทียบผลลัพธ์ของคุณกับค่า ของกลุ่มอื่น มันเหมือนหรือแตกต่างกันไหม? กลุ่มใดมีค่ามากที่สุดและน้อยที่สุด ทดสอบค่าเหล่านั้นและปรับผลลัพธ์ของคุณหากจำเป็น
ตรวจสอบความเข้าใจของคุณ
ก่อนจะเริ่มบทเรียนถัดไป ให้แน่ใจว่าคุณเข้าใจแนวคิดในบทเรียนนี้แล้วโดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของคุณ
คำถามตรวจสอบความเข้าใจของคุณ > (Google Doc / .docx / .pdf)
เลือก ถัดไป > เพื่อรวมทักษะของคุณในกิจกรรม Putting It All Together