
Leçon 5 : Mouvement autonome le long de l'axe Z
Dans les leçons précédentes, vous avez exploré les axes x et y en codant le bras robotique à 6 axes pour se déplacer le long de ces deux axes.
Dans cette leçon, vous découvrirez l’axe z et comment coder le bras à 6 axes pour se déplacer le long de ce troisième axe.
À la fin de cette leçon, vous serez en mesure de coder le bras à 6 axes pour se déplacer le long de l'axe z, y compris le déplacement avec plusieurs axes changeant en même temps.
Introduction à l'axe Z
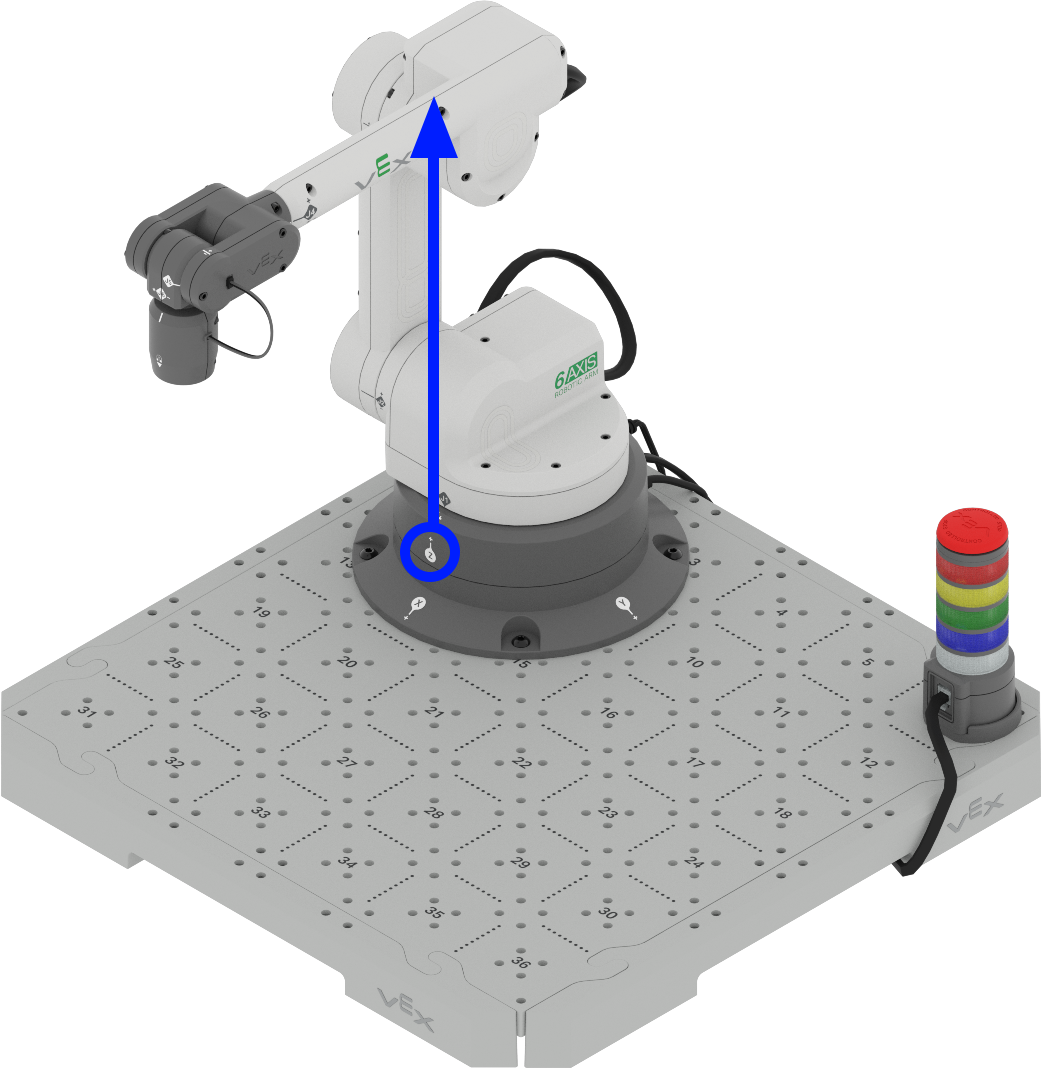
Dans le système de coordonnées cartésiennes, l'axe z représente le mouvement vertical ou la hauteur.
Contrairement aux axes x et y, qui correspondent généralement à des mouvements horizontaux (gauche-droite et avant-arrière), l'axe z est perpendiculaire aux deux, se déplaçant de haut en bas comme indiqué dans cette vidéo. Dans un environnement industriel, cet axe vertical est crucial pour les tâches qui nécessitent de soulever, d'abaisser ou d'atteindre des hauteurs différentes.
Dans le cas d'un bras à 6 axes, l'axe Z contrôle la hauteur ou la profondeur à laquelle le bras s'étend. La précision du déplacement le long de l'axe z est essentielle pour que le bras atteigne avec précision les cibles, évite les obstacles et effectue des opérations délicates comme le montre cette vidéo.
Dans le secteur manufacturier, les robots utilisent souvent l’axe Z pour placer des composants sur un
tapis roulant, empiler des articles ou effectuer des tâches d’assemblage nécessitant un mouvement
vertical. Dans les entrepôts, les systèmes robotisés utilisent l’axe Z pour récupérer ou stocker des
articles sur différents niveaux d’étagères.
Lors du codage des mouvements dans VEXcode, vous devrez prendre en compte l'axe z pour les tâches qui
impliquent de soulever ou d'abaisser le bras à 6 axes, comme indiqué dans cette vidéo. Cela introduit
une couche supplémentaire de complexité par rapport aux mouvements limités aux axes x et y comme vous
l'avez vu dans les leçons 3 et 4.
Dans ce clip vidéo, le bras à 6 axes commence en position de sécurité, puis se déplace pour récupérer le disque sur l'emplacement de la tuile 18. Il se déplace vers le bas sur l'axe z pour engager le disque, puis soulève le disque le long de l'axe z, pour se déplacer en toute sécurité sur les autres disques de la tuile. Le bras à 6 axes se déplace ensuite sur l'emplacement de la tuile 33 et descend sur l'axe z pour déposer en toute sécurité le disque dans son nouvel emplacement.
Codage du bras à 6 axes le long de l'axe Z
L'axe z peut être utilisé de la même manière que vous avez codé les mouvements le long des axes x et y dans les leçons précédentes. Suivez les étapes ci-dessous pour coder le bras à 6 axes pour qu'il se déplace le long de l'axe z.
Ouvrez votre projet enregistré de la leçon 4. Renommez le projet Modifiez les valeurs z et enregistrez-le sur votre appareil.
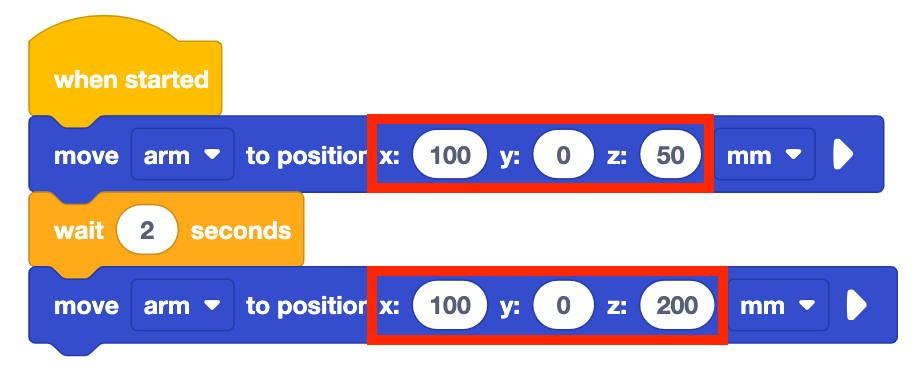
Modifiez les valeurs des deux blocs Déplacer vers la position aux coordonnées suivantes. N'oubliez pas que les coordonnées s'écrivent (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
À votre avis, que fera le bras à 6 axes ? Notez votre prédiction dans votre carnet d’ingénierie.
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet.
Observez le bras à 6 axes lorsqu'il se déplace le long de l'axe z. Notez que le bras à 6 axes commencera par se déplacer vers la position de sécurité (120, 0, 100), puis exécutera les blocs du projet.
Arrêtez le projet une fois que le bras à 6 axes a cessé de bouger.
Notez vos observations dans votre carnet d’ingénierie. Comment le bras à 6 axes s'est-il déplacé dans ce projet ? Est-ce similaire ou différent de votre prédiction ? Pourquoi?
Notez que lorsque la valeur z est modifiée, le bras à 6 axes s'étend et se rétracte le long de l'axe z, comme indiqué dans cette animation.
Comment cela se compare-t-il au mouvement de votre bras à 6 axes dans ce projet ?
Pour votre information
Vous pouvez également combiner des mouvements le long de plusieurs axes à la fois en insérant une coordonnée (x, y, z) dans le bloc Déplacer vers la position.
Afin de trouver les coordonnées spécifiques (x, y, z) d'un emplacement, vous pouvez utiliser la console Monitor dans VEXcode EXP. Pour ouvrir la console, sélectionnez l'icône Monitor Console dans le coin supérieur droit de la barre d'outils.
La console du moniteur s'ouvre et affiche les données, notamment les valeurs x, y et z actuelles de l'effecteur final et si la tour de signalisation est enfoncée. Notez que les valeurs de la console du moniteur seront mises à jour en temps réel lorsque vous déplacez manuellement le bras à 6 axes, comme indiqué dans la vidéo ci-dessous.
Activité
Maintenant que vous avez appris à coder le bras à 6 axes pour qu'il se déplace le long de l'axe Z, vous allez pratiquer ces compétences. Dans cette activité, vous coderez le bras à 6 axes pour qu'il se déplace le long de l'axe z afin de trouver les valeurs z minimales et maximales vers lesquelles le bras à 6 axes peut se déplacer.
- Faites une prédiction pour les valeurs z minimales et maximales vers lesquelles le bras à 6 axes peut se déplacer. Notez les valeurs prédites dans votre cahier d’ingénierie.
- En utilisant le même projet ci-dessus, les valeurs z dans les blocs Déplacer vers la position par vos valeurs prédites.
- Exécutez votre projet pour tester vos prédictions. Assurez-vous que votre bras 6 axes est connecté à VEXcode.
- Continuez à prédire et à tester différentes valeurs z. Assurez-vous d’enregistrer vos prédictions et vos résultats dans votre carnet d’ingénierie lorsque vous testez vos projets. Quelles valeurs minimales et maximales trouvez vous ?
- Comparez vos résultats aux valeurs des autres groupes. Sont-ils similaires ou différents ? Quel groupe a les valeurs les plus grandes et les plus petites ? Testez ces valeurs et ajustez vos résultats si nécessaire.
Vérifiez votre compréhension
Avant de commencer la leçon suivante, assurez-vous de bien comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d' .
Questions pour vérifier votre compréhension > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour combiner vos compétences dans l’activité « Mettre tout cela ensemble ».