
Bài 5: Chuyển động tự động dọc theo trục Z
Trong các Bài học trước, bạn đã khám phá trục x và trục y bằng cách mã hóa Cánh tay rô-bốt 6 trục để di chuyển dọc theo hai trục đó.
Trong Bài học này, bạn sẽ tìm hiểu về trục z và cách lập trình Cánh tay 6 trục để di chuyển dọc theo trục thứ ba này.
Đến cuối Bài học này, bạn sẽ có thể lập trình cho Cánh tay 6 trục để di chuyển dọc theo trục z, bao gồm cả việc di chuyển nhiều trục thay đổi cùng lúc.
Giới thiệu về Trục Z
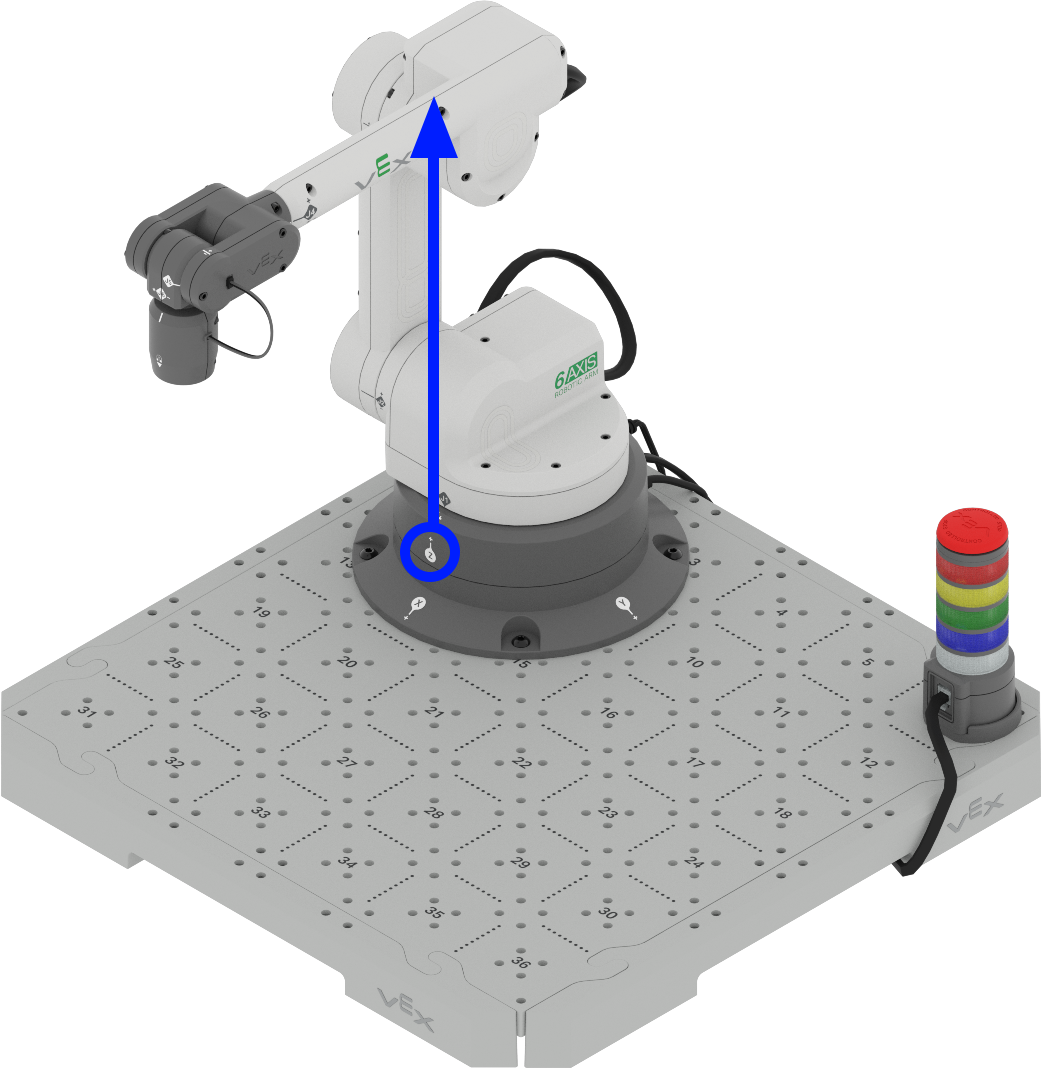
Trong hệ tọa độ Descartes, trục z biểu thị chuyển động theo chiều thẳng đứng hoặc chiều cao.
Không giống như trục x và y, thường tương ứng với các chuyển động theo chiều ngang (trái-phải và tiến-lùi), trục z vuông góc với cả hai, di chuyển lên và xuống như thể hiện trong video này. Trong môi trường công nghiệp, trục thẳng đứng này rất quan trọng đối với các nhiệm vụ đòi hỏi phải nâng, hạ hoặc với tới ở các độ cao khác nhau.
Trong trường hợp cánh tay 6 trục, trục z sẽ điều khiển độ cao hoặc độ thấp mà cánh tay có thể vươn ra. Độ chính xác khi di chuyển dọc theo trục z rất quan trọng để cánh tay có thể tiếp cận mục tiêu một cách chính xác, tránh chướng ngại vật và thực hiện các thao tác tinh vi như trong video này.
Trong sản xuất, robot thường sử dụng trục z để đặt các thành phần lên băng chuyền, xếp các vật phẩm hoặc thực hiện các nhiệm vụ lắp ráp đòi hỏi chuyển động theo chiều dọc. Trong kho hàng, hệ thống robot sử dụng trục z để lấy hoặc lưu trữ các mặt hàng trên các tầng kệ khác nhau.
Khi mã hóa chuyển động trong VEXcode, bạn sẽ cần xem xét trục z cho các nhiệm vụ liên quan đến việc nâng hoặc hạ Cánh tay 6 trục như được hiển thị trong video này. Điều này tạo ra thêm một lớp phức tạp so với các chuyển động chỉ giới hạn ở trục x và y như bạn đã thấy trong Bài 3 và Bài 4.
Trong đoạn video clip này, Cánh tay 6 trục bắt đầu ở vị trí an toàn, sau đó di chuyển để nhặt Đĩa ở vị trí Ô 18. Nó di chuyển xuống trục z để khớp với Đĩa, sau đó nâng Đĩa lên dọc theo trục z để di chuyển an toàn qua các Đĩa khác trên Ô. Sau đó, cánh tay 6 trục di chuyển qua vị trí Ngói 33 và di chuyển xuống trục z để thả Đĩa xuống vị trí mới một cách an toàn.
Mã hóa cánh tay 6 trục dọc theo trục Z
Trục z có thể được sử dụng tương tự như cách bạn đã mã hóa chuyển động dọc theo trục x và trục y trong các Bài học trước. Thực hiện theo các bước dưới đây để lập trình cho Cánh tay 6 trục di chuyển dọc theo trục z.
Mở dự án đã lưu của bạn từ Bài 4. Đổi tên dự án Thay đổi giá trị zvà lưu vào thiết bị của bạn.
Thay đổi giá trị của hai khối Di chuyển đến vị trí theo tọa độ sau. Hãy nhớ rằng tọa độ được viết là (x, y, z).
- (100, 0, 50)
- (100, 0, 200)
Bạn nghĩ điều này sẽ khiến cánh tay 6 trục làm gì? Ghi lại dự đoán của bạn vào sổ tay kỹ thuật.

Đảm bảo rằng Tay 6 trục được kết nối với VEXcode. Chạy dự án.
Quan sát cánh tay 6 trục khi nó di chuyển dọc theo trục z. Lưu ý rằng Cánh tay 6 trục sẽ bắt đầu bằng cách di chuyển đến Vị trí an toàn (120, 0, 100), sau đó sẽ thực hiện các khối trong dự án.
Dừng dự án khi Cánh tay 6 trục dừng chuyển động.
Ghi lại những quan sát của bạn vào sổ tay kỹ thuật. Cánh tay 6 trục di chuyển như thế nào trong dự án này? Nó giống hay khác với dự đoán của bạn? Tại sao?
Lưu ý rằng khi giá trị z thay đổi, Cánh tay 6 trục sẽ mở rộng và thu lại dọc theo trục z, như minh họa trong hình ảnh động này.
Nó so sánh thế nào với chuyển động của Cánh tay 6 trục trong dự án này?
Để bạn biết
Bạn cũng có thể kết hợp các chuyển động dọc theo nhiều trục cùng một lúc bằng cách chèn tọa độ (x, y, z) vào khối Di chuyển đến vị
Để tìm tọa độ cụ thể (x, y, z) của một vị trí, bạn có thể sử dụng Bảng điều khiển giám sát trong VEXcode EXP. Để mở bảng điều khiển, hãy chọn biểu tượng Bảng điều khiển giám sát ở góc trên bên phải của Thanh công cụ.
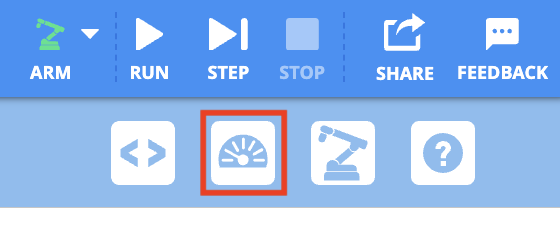
Bảng điều khiển giám sát sẽ mở ra và hiển thị cho bạn dữ liệu bao gồm các giá trị x, y và z hiện tại của bộ phận tác động cuối và liệu Tháp tín hiệu có đang được nhấn hay không. Lưu ý rằng các giá trị trên Bảng điều khiển màn hình sẽ cập nhật theo thời gian thực khi bạn di chuyển Tay 6 trục theo cách thủ công, như được hiển thị trong video bên dưới.
Hoạt động
Bây giờ bạn đã học cách lập trình cho Cánh tay 6 trục để di chuyển dọc theo trục z, bạn sẽ thực hành các kỹ năng này. Trong hoạt động này, bạn sẽ lập trình cho Cánh tay 6 trục di chuyển dọc theo trục z để tìm giá trị z tối thiểu và tối đa mà Cánh tay 6 trục có thể di chuyển tới.
- Đưa ra dự đoán về giá trị z tối thiểu và tối đa mà cánh tay 6 trục có thể di chuyển tới. Ghi lại các giá trị dự đoán vào sổ tay kỹ thuật của bạn.
- Sử dụng cùng một dự án ở trên, hãy thay đổi các giá trị z trong các Di chuyển đến vị tríthành các giá trị dự đoán của bạn.
- Chạy dự án để kiểm tra dự đoán của bạn. Đảm bảo Tay 6 trục của bạn được kết nối với VEXcode.
- Tiếp tục dự đoán và kiểm tra các giá trị z khác nhau. Hãy chắc chắn ghi lại dự đoán và kết quả của bạn vào sổ tay kỹ thuật khi thử nghiệm các dự án. Bạn tìm được giá trị tối thiểu và tối đa nào?
- So sánh kết quả của bạn với giá trị của các nhóm khác. Chúng giống nhau hay khác nhau? Nhóm nào có giá trị lớn nhất và nhỏ nhất? Kiểm tra các giá trị đó và điều chỉnh kết quả nếu cần.
Kiểm tra sự hiểu biết của bạn
Trước khi bắt đầu Bài học tiếp theo, hãy đảm bảo rằng bạn hiểu các khái niệm trong Bài học này bằng cách trả lời các câu hỏi trong tài liệu bên dưới trong sổ tay kỹ thuật của bạn.
Kiểm tra câu hỏi hiểu biết của bạn > (Google Doc / .docx / .pdf)
Chọn Tiếp theo > để kết hợp các kỹ năng của bạn trong hoạt động Tổng hợp tất cả.