
Lektion 5: Autonome Bewegung entlang der Z-Achse
In den vorherigen Lektionen haben Sie die x- und y-Achsen erkundet, indem Sie den 6-Achsen-Roboterarm so codiert haben, dass er sich entlang dieser beiden Achsen bewegt.
In dieser Lektion lernen Sie die Z-Achse kennen und erfahren, wie Sie den 6-Achsen-Arm so codieren, dass er sich entlang dieser dritten Achse bewegt.
Am Ende dieser Lektion können Sie den 6-Achsen-Arm so programmieren, dass er sich entlang der Z-Achse bewegt, einschließlich der Bewegung mit gleichzeitigem Wechsel mehrerer Achsen.
Einführung in die Z-Achse
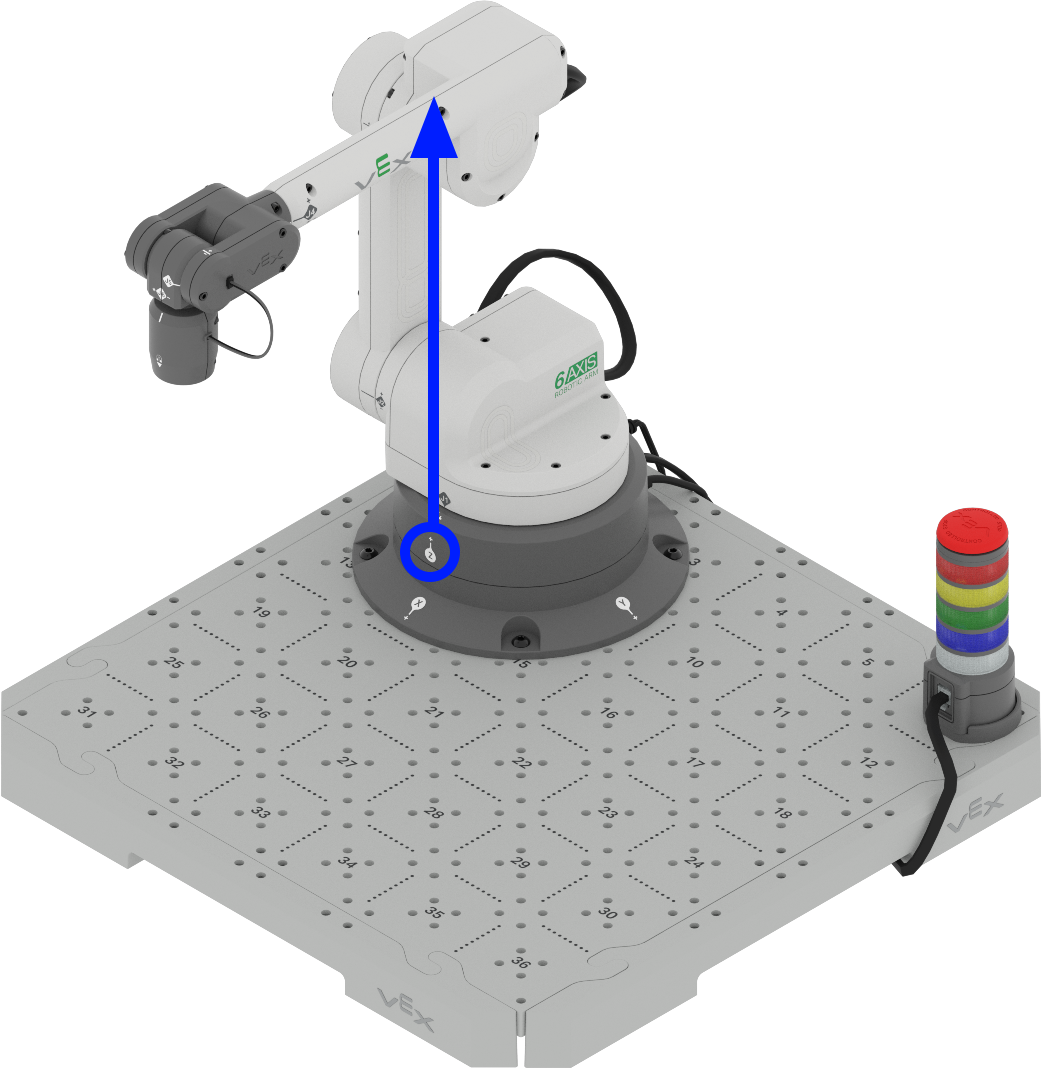
Im kartesischen Koordinatensystem stellt die Z-Achse die vertikale Bewegung oder Höhe dar.
Anders als die X- und Y-Achse, die normalerweise horizontalen Bewegungen (links-rechts und vorwärts-rückwärts) entsprechen, steht die Z-Achse senkrecht zu beiden und bewegt sich auf und ab, wie in diesem Video gezeigt. In einer industriellen Umgebung ist diese vertikale Achse von entscheidender Bedeutung für Aufgaben, die Heben, Senken oder Erreichen unterschiedlicher Höhen erfordern.
Bei einem 6-Achsen-Arm steuert die Z-Achse, wie hoch oder tief der Arm ausgefahren wird. Die Präzision bei der Bewegung entlang der Z-Achse ist entscheidend, damit der Arm Ziele präzise erreichen, Hindernissen ausweichen und heikle Operationen ausführen kann, wie in diesem Video gezeigt.
In der Fertigung nutzen Roboter häufig die Z-Achse, um Komponenten auf einem Förderband zu
platzieren, Gegenstände zu stapeln oder Montageaufgaben auszuführen, die vertikale Bewegungen
erfordern. In Lagern nutzen Robotersysteme die Z-Achse, um Artikel auf verschiedenen Regalebenen
abzurufen oder einzulagern.
Beim Kodieren von Bewegungen in VEXcode müssen Sie die Z-Achse für Aufgaben berücksichtigen, die das
Anheben oder Absenken des 6-Achsen-Arms beinhalten, wie in diesem Video gezeigt. Dies führt zu einer
zusätzlichen Komplexitätsebene im Vergleich zu den auf die x- und y-Achse beschränkten Bewegungen, wie
Sie in den Lektionen 3 und 4 gesehen haben.
In diesem Videoclip beginnt der 6-Achsen-Arm in der sicheren Position und bewegt sich dann, um die Scheibe an Kachelposition 18 aufzunehmen. Es bewegt sich auf der Z-Achse nach unten, um die Scheibe einzurasten, und hebt die Scheibe dann entlang der Z-Achse nach oben, um sie sicher über die anderen Scheiben auf der Kachel zu bewegen. Der 6-Achsen-Arm bewegt sich dann über die Kachelposition 33 und bewegt sich auf der Z-Achse nach unten, um die Scheibe sicher an ihrer neuen Position abzulegen.
Kodierung des 6-Achsen-Arms entlang der Z-Achse
Die Z-Achse kann ähnlich verwendet werden, wie Sie in früheren Lektionen Bewegungen entlang der X- und Y-Achse kodiert haben. Befolgen Sie die nachstehenden Schritte, um den 6-Achsen-Arm für die Bewegung entlang der Z-Achse zu codieren.
Öffnen Sie Ihr gespeichertes Projekt aus Lektion 4. Benennen Sie das Projekt ändern Sie die Z-Werte und speichern Sie es auf Ihrem Gerät.
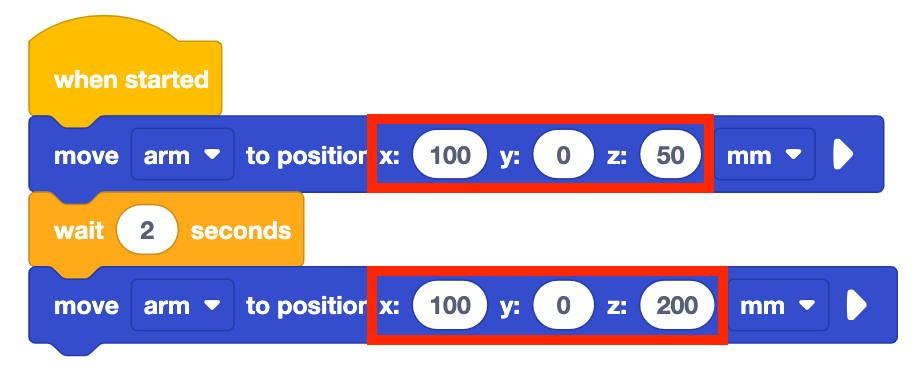
Ändern Sie die Werte der beiden Blöcke – Zu Position bewegen“ in die folgenden Koordinaten. Denken Sie daran, dass Koordinaten als (x, y, z) geschrieben werden.
- (100, 0, 50)
- (100, 0, 200)
Was wird der 6-Achsen-Arm Ihrer Meinung nach tun? Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.
Stellen Sie sicher, dass der 6-Achsen-Arm mit VEXcode verbunden ist. Führen Sie das Projekt aus.
Beobachten Sie den 6-Achsen-Arm, während er sich entlang der Z-Achse bewegt. Beachten Sie, dass der 6-Achsen-Arm zunächst zur sicheren Position (120, 0, 100) fährt und dann die Blöcke im Projekt ausführt.
Stoppen Sie das Projekt, sobald der 6-Achsen-Arm zum Stillstand gekommen ist.
Notieren Sie Ihre Beobachtungen in Ihrem technischen Notizbuch. Wie bewegte sich der 6-Achsen-Arm in diesem Projekt? Ist es Ihrer Vorhersage ähnlich oder unterscheidet es sich davon? Warum?
Beachten Sie, dass sich der 6-Achsen-Arm beim Ändern des Z-Werts entlang der Z-Achse ausdehnt und einfährt, wie in dieser Animation gezeigt.
Wie ist das im Vergleich zur Bewegung Ihres 6-Achsen-Arms in diesem Projekt?
Zu Ihrer Information
Sie können Bewegungen entlang mehrerer Achsen auch gleichzeitig kombinieren, indem Sie eine (x, y, z)-Koordinate in den Block „ Zu Position bewegen“ einfügen.
Um die spezifischen (x, y, z)-Koordinaten eines Standorts zu finden, können Sie die Monitorkonsole in VEXcode EXP verwenden. Um die Konsole zu öffnen, wählen Sie das Monitorkonsolensymbol in der oberen rechten Ecke der Symbolleiste.
Die Monitorkonsole wird geöffnet und zeigt Ihnen Daten, einschließlich der aktuellen X-, Y- und Z-Werte des Endeffektors und ob der Signalturm gedrückt wird. Beachten Sie, dass die Werte der Monitorkonsole in Echtzeit aktualisiert werden, wenn Sie den 6-Achsen-Arm manuell bewegen, wie im Video unten gezeigt.
Aktivität
Nachdem Sie nun gelernt haben, wie Sie den 6-Achsen-Arm für die Bewegung entlang der Z-Achse programmieren, können Sie diese Fähigkeiten nun in die Praxis umsetzen. In dieser Aktivität codieren Sie den 6-Achsen-Arm so, dass er sich entlang der Z-Achse bewegt, um die minimalen und maximalen Z-Werte zu ermitteln, zu denen sich der 6-Achsen-Arm bewegen kann.
- Machen Sie eine Vorhersage für die minimalen und maximalen Z-Werte, die der 6-Achsen-Arm erreichen kann. Notieren Sie die vorhergesagten Werte in Ihrem technischen Notizbuch.
- Ändern Sie mit demselben Projekt wie oben die Z-Werte in den Blöcken Ihrer vorhergesagten Werte.
- Führen Sie Ihr Projekt aus, um Ihre Vorhersagen zu testen. Stellen Sie sicher, dass Ihr 6-Achsen-Arm mit VEXcode verbunden ist.
- Fahren Sie mit der Vorhersage und dem Testen verschiedener Z-Werte fort. Denken Sie beim Testen Ihrer Projekte unbedingt daran, Ihre Vorhersagen und Ergebnisse in Ihrem technischen Notizbuch aufzuzeichnen. Welche minimalen und maximalen Werte finden Sie ?
- Vergleichen Sie Ihre Ergebnisse mit Werten anderer Gruppen. Sind sie ähnlich oder unterschiedlich? Welche Gruppe hat die größten und kleinsten Werte? Testen Sie diese Werte und passen Sie Ihre Ergebnisse bei Bedarf an.
Überprüfen Sie Ihr Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte dieser Lektion verstanden haben, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Questions pour vérifier votre compréhension > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > aus, um Ihre Fähigkeiten in der Aktivität „Alles zusammenfügen“ zu kombinieren.