
Ovladače a smyčky
 Příklad projektu
Příklad projektu Ovladače a smyčky
V soutěžích týmy používají ovladače k bezdrátovému ovládání svých robotů. Řídicí jednotka je naprogramována tak, aby aktualizovala robota na základě vstupu uživatele. V projektu se používají smyčky, takže robot opakovaně kontroluje aktualizované vstupní informace. Smyčky umožňují projektu rychle zkontrolovat, která tlačítka byla stisknuta nebo jak daleko byly joysticky stisknuty. Po kontrole jsou tyto informace rychle předány robotu, aby rychle reagoval na pokyny řídicí jednotky.
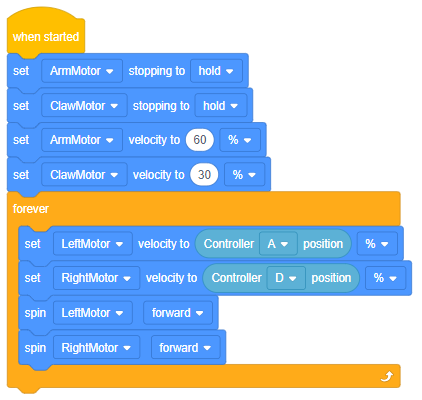
Na obrázku výše je ukázkový projekt Clawbot Control od VEXcode IQ. Navždy smyčka v tomto projektu kontroluje polohy os A a D navždy za účelem nastavení rychlosti motorů.
Smyčky jsou důležité i pro autonomní programování bez ovladače. Smyčka pomáhá zjednodušit a uspořádat opakované příkazy v rámci projektu.
![]() Motivovat diskusi
- opakující
se chování
Motivovat diskusi
- opakující
se chování
Projděte si letošní soutěž VEX IQ se studenty kliknutím na tento odkaz. Nebo se nechte inspirovat následujícími hrami z předchozích let.
Otázka: Jaké chování bude robot pravděpodobně opakovat během soutěže?
Odpověď: Studenti budou pravděpodobně okamžitě reagovat pohyby, ale u projektu je méně pravděpodobné, že bude používat smyčky pro pohyby než smyčky pro kontrolu senzorů.
Otázka: Jak byste z tohoto opakujícího se chování udělali smyčku?
Odpověď: Bez ohledu na opakované chování je nutným krokem přetažení bloků uvnitř smyčky. Studenti musí mít pohodlné hnízdní bloky uvnitř smyčkových bloků.
Otázka: Zeptejte se studentů, který blok ve VEXcode IQ by jim mohl pomoci naprogramovat roboty tak, aby se chovali po stisknutí jediného tlačítka ovladače. Také se zeptejte, do které skupiny bloků patří.
A: Tento blok se nazývá blok tlačítka Kdy regulátoru a je umístěn pod bloky událostí v VEXcode IQ.
![]() Rozšiřte své učení
-
kontrola příkladů projektů
Rozšiřte své učení
-
kontrola příkladů projektů
Chcete-li tuto aktivitu rozšířit, požádejte své studenty, aby prozkoumali rozdíly mezi arkádovým ovládáním a ovládáním nádrže. Studenti mohou sledovat příklady projektů ve VEXcode IQ. Existují čtyři ukázkové projekty: Left Arcade, Right Arcade, Split Arcade a Tank Drive.


Diskutujte o tom, jak fungují smyčky v rámci programů, stejně jako o výhodách a nevýhodách každého typu kontroly.
Chcete-li tuto aktivitu spojit s matematikou, použijte levou/pravou arkádu (jeden joystick) a rozdělte arkádu/pohon nádrže (oba joysticky) výše a diskutujte o rolích os X a Y v rámci projektu. Hodnoty polohy osy X zachycují vlevo-vpravo, vodorovné pohyby joysticku(ů), zatímco hodnoty z polohy osy Y zachycují nahoru-dolů, svislé pohyby joysticku(ů).