
Controller e loop
Controller e loop
Nelle competizioni, le squadre utilizzano i controller per controllare in modalità wireless i loro robot. Il controller è programmato per aggiornare il robot in base all'input dell'utente. I loop vengono utilizzati nel progetto in modo che il robot controlli ripetutamente le informazioni di input aggiornate. I loop consentono al progetto di controllare rapidamente quali pulsanti sono stati premuti o fino a che punto sono stati premuti i joystick. Una volta verificate, queste informazioni vengono rapidamente trasmesse al robot in modo che risponda rapidamente alle istruzioni del controller.
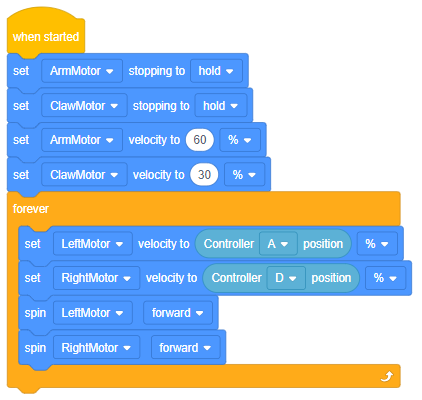
L'immagine sopra mostra il progetto di esempio Clawbot Control di VEXcode IQ. Il ciclo Forever in questo progetto controlla le posizioni degli assi A e D per sempre al fine di impostare la velocità dei motori.
I loop sono importanti anche per la programmazione autonoma senza controller. Un ciclo aiuta a semplificare e organizzare i comandi ripetuti all'interno di un progetto.
![]() Motivare la discussione
-
Comportamenti ciclici
Motivare la discussione
-
Comportamenti ciclici
Rivedi il gioco VEX IQ Competition di quest' anno con gli studenti cliccando su questo link. Oppure, fai la seguente discussione basata sui giochi degli anni precedenti.
D: Quali comportamenti sono suscettibili di essere ripetuti dal
robot durante una competizione?
R: È probabile che gli studenti rispondano immediatamente con i
movimenti, ma è meno probabile che il progetto utilizzi loop per i movimenti piuttosto
che loop per il controllo dei sensori.
D: Come trasformeresti questi comportamenti ripetitivi in un
ciclo?
R: Indipendentemente dal comportamento o dai comportamenti
ripetuti, trascinare i blocchi all'interno di un ciclo è un passaggio necessario. Gli
studenti devono essere comodi blocchi di nidificazione all'interno dei blocchi ad
anello.
D: Chiedi agli studenti quale blocco in VEXcode IQ potrebbe
aiutarli a programmare i loro robot per comportarsi dopo aver premuto un singolo
pulsante del controller. Inoltre, chiedi a quale gruppo di blocchi appartiene.
R: Quel blocco è chiamato blocco pulsanti Quando il controller e
si trova sotto i blocchi Eventi in VEXcode IQ.
![]() Estendi il tuo apprendimento
-
Rivedere i progetti di esempio
Estendi il tuo apprendimento
-
Rivedere i progetti di esempio
Per espandere questa attività, chiedi ai tuoi studenti di esplorare le differenze tra il controllo arcade e il controllo del carro armato. Gli studenti possono seguire i progetti di esempio presenti in VEXcode IQ. Ci sono quattro progetti di esempio: Left Arcade, Right Arcade, Split Arcade e Tank Drive.


Discutere come funzionano i loop all'interno dei programmi, nonché i pro e i contro di
ciascun tipo di controllo.
Per correlare questa attività alla matematica,
utilizzare la galleria sinistra/destra (un joystick) e dividere i progetti
arcade/serbatoio (entrambi i joystick) sopra per discutere i ruoli degli assi X e Y
all'interno del progetto. Le letture della posizione dell'asse X catturano i movimenti
orizzontali sinistra-destra del/i joystick mentre le letture della posizione dell'asse Y
catturano i movimenti verticali del/i joystick.