
控制器和循環
在比賽中,團隊使用控制器無線控制他們的機器人。 控制器被編程為根據使用者的輸入更新機器人。 專案中使用了循環,以便機器人重複檢查更新的輸入資訊。 循環允許項目快速檢查哪些按鈕被按下,或操縱桿被推了多遠。 一旦檢查完畢,這些資訊就會快速轉發給機器人,以便它可以快速回應控制器的指令。
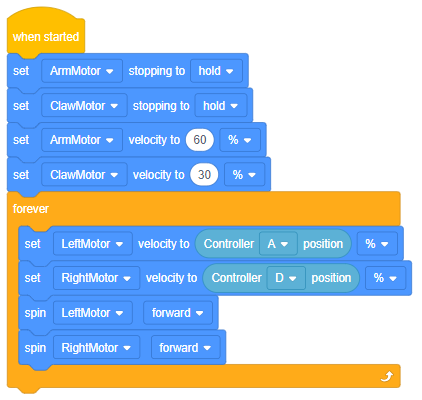
上圖顯示了 VEXcode IQ 中的 Clawbot Control 範例專案。 此專案中的永遠循環會永遠檢查軸 A 和 D 的位置,以設定馬達的速度。
即使對於沒有控制器的自主編程,循環也很重要。 循環有助於簡化和組織專案中的重複命令。
![]() 激發討論
-
循環行為
激發討論
-
循環行為
點選 此連結與學生一起回顧今年的 VEX IQ 競賽遊戲。 或者,根據往年的比賽進行以下討論。
問: 機器人在比賽中可能會重複哪些行為?
A: 學生可能會立即做出動作回應,但該專案不太可能使用循環進行動作,而是使用循環來檢查感測器。
問: 你會如何讓這些重複的行為變成一個循環?
A: 無論重複什麼行為,將區塊拖曳到循環內都是必要的步驟。 學生需要在循環區塊內輕鬆地嵌套區塊。
Q: 詢問學生 VEXcode IQ 中的哪個模組可以幫助他們對機器人進行編程,使其在按下單一控制器按鈕後表現出行為。 另外,問它屬於哪一組塊。
A: 此區塊稱為 When 控制器按鈕區塊,位於 VEXcode IQ 中的事件區塊下。
![]() 擴展您的學習
-
查看範例項目
擴展您的學習
-
查看範例項目
為了擴展此活動,請您的學生探索街機控制和坦克控制之間的差異。 學生可以按照 VEXcode IQ 中的範例專案進行操作。 有四個範例項目:Left Arcade、Right Arcade、Split Arcade 和 Tank Drive。


討論程式中的循環如何運作,以及每種控制類型的優缺點。
為了將此活動與數學聯繫起來,請使用上面的左/右街機(一個操縱桿)和分割街機/坦克驅動器(兩個操縱桿)項目來討論 X 軸和 Y 軸在項目中的作用。 X 軸位置的讀數會捕捉操縱桿的左右、水平運動,而 Y 軸位置的讀數會捕捉操縱桿的上下、垂直運動。