
Controllers en lussen
Controllers en lussen
In wedstrijden gebruiken teams controllers om hun robots draadloos te besturen. De controller is geprogrammeerd om de robot bij te werken op basis van input van de gebruiker. Lussen worden gebruikt in het project, zodat de robot herhaaldelijk controleert op bijgewerkte invoerinformatie. Met lussen kan het project snel controleren welke knoppen zijn ingedrukt of hoe ver joysticks zijn ingedrukt. Eenmaal gecontroleerd, wordt deze informatie snel doorgegeven aan de robot, zodat deze snel reageert op de instructies van de controller.
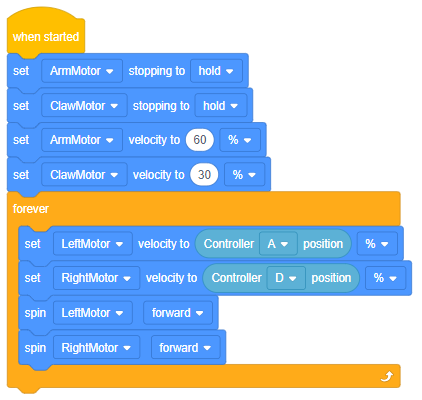
De afbeelding hierboven toont het voorbeeldproject Clawbot Control van VEXcode IQ. De forever loop in dit project controleert de posities van de assen A en D voor altijd om de snelheid van de motoren in te stellen.
Lussen zijn ook belangrijk voor autonoom programmeren zonder controller. Een lus helpt om herhaalde opdrachten binnen een project te vereenvoudigen en te organiseren.
![]() Motiveer discussie
- Loopinggedrag
Motiveer discussie
- Loopinggedrag
Bekijk het VEX IQ Competition-spel van dit jaar met studenten door op deze link te klikken. Of laat de volgende discussie gebaseerd zijn op de games van voorgaande jaren.
V: Welk gedrag zal de robot waarschijnlijk herhalen tijdens een wedstrijd?
A: Studenten zullen waarschijnlijk onmiddellijk reageren met bewegingen, maar het project zal minder snel lussen gebruiken voor bewegingen dan het is om lussen te gebruiken voor het controleren van sensoren.
Vraag: Hoe zou u van dit repetitieve gedrag een lus maken?
A: Ongeacht het gedrag dat wordt herhaald, is het slepen van de blokken in een lus een vereiste stap. Studenten moeten zich comfortabel voelen bij het nestelen van blokken in lusblokken.
V: Vraag studenten welk blok in VEXcode IQ hen kan helpen hun robots te programmeren om zich te gedragen nadat een enkele controllerknop is ingedrukt. Vraag ook bij welke groep blokken het hoort.
A: Dat blok wordt het When controller-knopblok genoemd en bevindt zich onder de Events-blokken in VEXcode IQ.
![]() Breid je leerproces uit
- Voorbeeldprojecten
bekijken
Breid je leerproces uit
- Voorbeeldprojecten
bekijken
Om deze activiteit uit te breiden, vraag je je studenten om de verschillen tussen arcadebesturing en tankbesturing te verkennen. Studenten kunnen de voorbeeldprojecten in VEXcode IQ volgen. Er zijn vier voorbeeldprojecten: Left Arcade, Right Arcade, Split Arcade en Tank Drive.


Bespreek hoe de loops binnen de programma's werken, evenals de voor- en nadelen van elk type besturing.
Om deze activiteit te relateren aan wiskunde, gebruikt u de linker/rechter arcade (één joystick) en split arcade/tank drive (beide joysticks) projecten hierboven om de rollen van de X- en Y-assen binnen het project te bespreken. Aflezingen van de X-aspositie leggen links-rechts, horizontale bewegingen van de joystick(s) vast, terwijl aflezingen van de Y-aspositie omhoog-omlaag, verticale bewegingen van de joystick(s) vastleggen.