
Контролери та контури
У змаганнях команди використовують контролери для бездротового керування своїми роботами. Контролер запрограмований на оновлення робота на основі даних користувача. У проекті використовуються цикли, щоб робот неодноразово перевіряв наявність оновленої вхідної інформації. Цикли дозволяють проекту швидко перевіряти, які кнопки були натиснуті або наскільки далеко були натиснуті джойстики. Після перевірки ця інформація швидко передається роботу, щоб він швидко реагував на вказівки контролера.
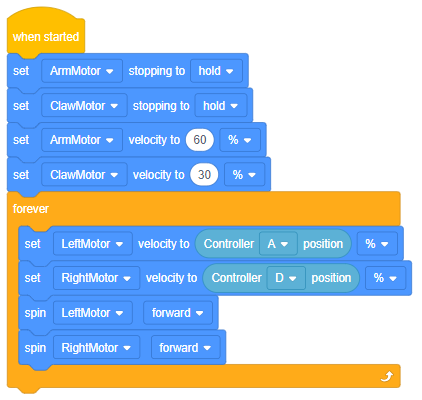
На зображенні вище показано приклад проекту Clawbot Control від VEXcode IQ. Вічний цикл у цьому проекті постійно перевіряє положення осей A і D, щоб встановити швидкість двигунів.
Петлі важливі навіть для автономного програмування без контролера. Цикл допомагає спростити й упорядкувати повторювані команди в проекті.
![]() Мотивація обговорення
-
Цикл поведінки
Мотивація обговорення
-
Цикл поведінки
Перегляньте зі студентами гру VEX IQ Competition цього року, натиснувши це посилання. Або проведіть наступне обговорення на основі ігор попередніх років.
Q: Яку поведінку робот може повторити під час змагань?
A: Студенти, швидше за все, негайно відреагують рухами, але в проекті менш імовірно, що цикли використовуватимуться для рухів, ніж петлі для перевірки датчиків.
Q: Як би ви перетворили ці повторювані дії в цикл?
A: Незалежно від поведінки, що повторюється, перетягування блоків усередині циклу є обов’язковим кроком. Учням має бути зручно вкладати блоки всередині циклічних блоків.
Q: Запитайте студентів, який блок у VEXcode IQ міг би допомогти їм запрограмувати своїх роботів на поведінку після натискання однієї кнопки контролера. Також запитайте, до якої групи блоків він входить.
A: Цей блок називається блоком кнопки контролера When і розташований під блоками подій у VEXcode IQ.
![]() Розширте своє навчання
-
Перегляд прикладів проектів
Розширте своє навчання
-
Перегляд прикладів проектів
Щоб розширити це завдання, попросіть своїх учнів дослідити відмінності між аркадним керуванням і керуванням танком. Студенти можуть наслідувати зразки проектів, знайдені у VEXcode IQ. Є чотири приклади проектів: Left Arcade, Right Arcade, Split Arcade і Tank Drive.


Обговоріть, як працюють цикли в програмах, а також плюси та мінуси кожного типу керування.
Щоб пов’язати цю вправу з математикою, скористайтеся проектами лівої/правої аркади (один джойстик) і розділеного аркадного/танкового приводу (обидва джойстики), щоб обговорити ролі осей X і Y у проекті. Показання положення осі X фіксують горизонтальні рухи джойстика(ів) вліво-вправо, тоді як показання положення осі Y фіксують вертикальні рухи джойстика(ів) вгору-вниз.