
Bộ điều khiển và vòng lặp
Bộ điều khiển và vòng lặp
Trong các cuộc thi, các đội sử dụng bộ điều khiển để điều khiển robot của họ không dây. Bộ điều khiển được lập trình để cập nhật robot dựa trên đầu vào từ người dùng. Các vòng lặp được sử dụng trong dự án để robot liên tục kiểm tra thông tin đầu vào được cập nhật. Các vòng lặp cho phép dự án nhanh chóng kiểm tra những nút nào đã được nhấn hoặc cần điều khiển đã được đẩy bao xa. Sau khi được kiểm tra, thông tin này sẽ nhanh chóng được chuyển tiếp đến robot để robot phản hồi nhanh chóng với các hướng dẫn của bộ điều khiển.
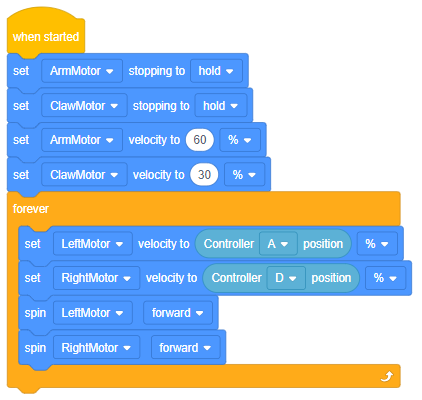
Hình ảnh trên cho thấy dự án ví dụ Clawbot Control từ VEXcode IQ. Vòng lặp forever trong dự án này kiểm tra vị trí của các trục A và D mãi mãi để thiết lập vận tốc của động cơ.
Các vòng lặp rất quan trọng ngay cả đối với lập trình tự động mà không cần bộ điều khiển. Một vòng lặp giúp đơn giản hóa và sắp xếp các lệnh lặp lại trong một dự án.
![]() Thúc đẩy thảo luận
- Hành vi
lặp lại
Thúc đẩy thảo luận
- Hành vi
lặp lại
Xem lại trò chơi VEX IQ Competition năm nay với học sinh bằng cách nhấp vào liên kết này. Hoặc, có cuộc thảo luận sau đây dựa trên các trò chơi của những năm trước.
Hỏi: Robot có thể lặp lại những hành vi nào trong một cuộc thi?
A: Học sinh có thể sẽ phản ứng ngay lập tức với các chuyển động nhưng dự án ít có khả năng sử dụng các vòng lặp cho các chuyển động hơn là sử dụng các vòng lặp để kiểm tra các cảm biến.
Q: Làm thế nào bạn có thể biến những hành vi lặp đi lặp lại này thành một vòng lặp?
Đ: Bất kể (các) hành vi được lặp lại, việc kéo các khối bên trong vòng lặp là một bước bắt buộc. Học sinh cần có các khối lồng thoải mái bên trong các khối vòng lặp.
Hỏi: Hỏi học sinh khối nào trong VEXcode IQ có thể giúp họ lập trình robot hoạt động sau khi nhấn một nút điều khiển. Ngoài ra, hãy hỏi xem nó thuộc nhóm khối nào.
Đ: Khối đó được gọi là khối nút When controller và nó nằm dưới các khối Events trong VEXcode IQ.
![]() Mở rộng việc học của bạn
-
Xem lại các dự án mẫu
Mở rộng việc học của bạn
-
Xem lại các dự án mẫu
Để mở rộng hoạt động này, hãy yêu cầu học viên khám phá sự khác biệt giữa điều khiển arcade và điều khiển xe tăng. Sinh viên có thể làm theo các dự án ví dụ có trong VEXcode IQ. Có bốn dự án mẫu: Left Arcade, Right Arcade, Split Arcade và Tank Drive.


Thảo luận về cách các vòng lặp trong các chương trình hoạt động, cũng như ưu và nhược điểm của từng loại kiểm soát.
Để liên hệ hoạt động này với toán học, hãy sử dụng các dự án arcade trái/phải (một cần điều khiển) và chia arcade/tank drive (cả hai cần điều khiển) ở trên để thảo luận về vai trò của trục X và Y trong dự án. Các chỉ số của vị trí trục X ghi lại chuyển động trái phải, ngang của (các) cần điều khiển trong khi các chỉ số từ vị trí trục Y ghi lại chuyển động lên xuống, dọc của (các) cần điều khiển.