
Kontrolery i pętle
Podczas zawodów zespoły używają kontrolerów do bezprzewodowego sterowania swoimi robotami. Sterownik jest zaprogramowany tak, aby aktualizował robota na podstawie danych wejściowych użytkownika. W projekcie zastosowano pętle, dzięki czemu robot wielokrotnie sprawdza dostępność aktualnych informacji wejściowych. Pętle pozwalają projektowi szybko sprawdzić, które przyciski zostały naciśnięte lub jak daleko przesunięto joysticki. Po sprawdzeniu informacja ta jest szybko przekazywana do robota, dzięki czemu szybko reaguje na polecenia sterownika.
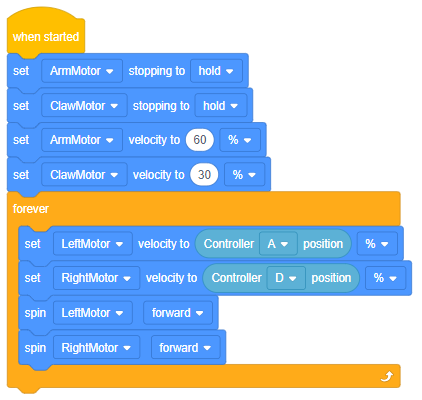
Powyższy obrazek przedstawia przykładowy projekt Clawbot Control z VEXcode IQ. Pętla wieczna w tym projekcie sprawdza pozycje osi A i D w sposób ciągły w celu ustawienia prędkości silników.
Pętle są ważne nawet przy programowaniu autonomicznym bez sterownika. Pętla pomaga uprościć i uporządkować powtarzające się polecenia w projekcie.
![]() Motywuj do dyskusji
-
Zachowania zapętlone
Motywuj do dyskusji
-
Zachowania zapętlone
Przejrzyj z uczniami tegoroczną grę VEX IQ Competition, klikając ten link. Możesz też przeprowadzić następującą dyskusję w oparciu o gry z poprzednich lat.
P: Jakie zachowania robot będzie prawdopodobnie powtarzał podczas zawodów?
A: Uczniowie prawdopodobnie natychmiast zareagują ruchami, ale w projekcie jest mniej prawdopodobne, że w projekcie będą używane pętle do wykonywania ruchów, niż pętle do sprawdzania czujników.
P: Jak zamieniłbyś te powtarzające się zachowania w pętlę?
A: Niezależnie od tego, jakie zachowania się powtarzają, wymaganym krokiem jest przeciąganie bloków wewnątrz pętli. Uczniowie muszą czuć się komfortowo, zagnieżdżając klocki wewnątrz bloków pętlowych.
P: Zapytaj uczniów, które bloki w VEXcode IQ mogą pomóc im zaprogramować roboty tak, aby zachowywały się po naciśnięciu pojedynczego przycisku kontrolera. Zapytaj także, do której grupy bloków należy.
A: Ten blok nazywa się blokiem przycisku kontrolera When i znajduje się pod blokami Events w VEXcode IQ.
![]() Rozszerz swoją naukę
-
Przeglądanie przykładowych projektów
Rozszerz swoją naukę
-
Przeglądanie przykładowych projektów
Aby rozszerzyć to ćwiczenie, poproś uczniów, aby zbadali różnice między sterowaniem w salonie gier a sterowaniem czołgami. Uczniowie mogą śledzić przykładowe projekty znalezione w VEXcode IQ. Istnieją cztery przykładowe projekty: Left Arcade, Right Arcade, Split Arcade i Tank Drive.


Omów sposób działania pętli w programach, a także zalety i wady każdego rodzaju sterowania.
Aby powiązać to ćwiczenie z matematyką, użyj powyższych projektów lewego/prawego salonu gier (jeden joystick) i rozdzielonego napędu salonu gier/czołgu (oba joysticki), aby omówić rolę osi X i Y w projekcie. Odczyty pozycji osi X rejestrują poziome ruchy joysticka(ów) w lewo-prawo, natomiast odczyty pozycji osi Y rejestrują pionowe ruchy joysticka(ów) w górę i w dół.