
Valdikliai ir kilpos
Varžybose komandos naudoja valdiklius savo robotams valdyti belaidžiu būdu. Valdiklis užprogramuotas atnaujinti robotą pagal vartotojo įvestį. Projekte naudojamos kilpos, kad robotas pakartotinai tikrintų, ar nėra atnaujintos įvesties informacijos. Kilpos leidžia projektui greitai patikrinti, kurie mygtukai buvo paspausti arba kaip toli buvo nuspaustos vairasvirtės. Patikrinus, ši informacija greitai perduodama robotui, kad jis greitai reaguotų į valdiklio nurodymus.
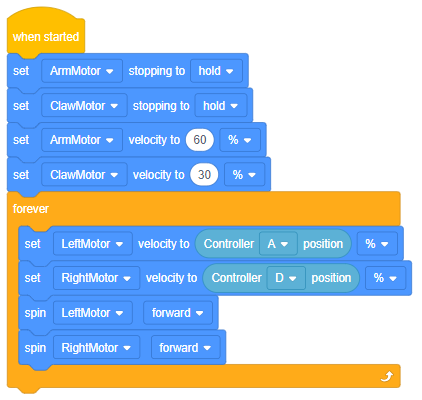
Aukščiau pateiktame paveikslėlyje parodytas „VEXcode IQ“ projekto „Clawbot Control“ pavyzdys. Šio projekto amžinoji kilpa amžinai tikrina ašių A ir D padėtis, kad nustatytų variklių greitį.
Kilpos yra svarbios net autonominiam programavimui be valdiklio. Ciklas padeda supaprastinti ir organizuoti pasikartojančias komandas projekte.
![]() Motyvuoti diskusiją
-
Kilimo elgesys
Motyvuoti diskusiją
-
Kilimo elgesys
Peržiūrėkite šių metų VEX IQ konkurso žaidimą su mokiniais spustelėdami šią nuorodą. Arba toliau aptarkite ankstesnių metų žaidimus.
Kl.: Kokį elgesį robotas greičiausiai kartos varžybų metu?
A: Tikėtina, kad mokiniai iš karto reaguos judesiais, tačiau projekte mažiau tikėtina, kad judesiams bus naudojamos kilpos nei jutikliams tikrinti.
Kl.: Kaip šiuos pasikartojančius elgesius paverstumėte kilpa?
A: Nesvarbu, koks elgesys pasikartoja, blokų tempimas kilpos viduje yra būtinas žingsnis. Mokiniai turi patogiai įdėti blokus kilpų blokų viduje.
Klausimas: Paklauskite mokinių, kuris VEXcode IQ blokas galėtų padėti jiems suprogramuoti savo robotus elgtis paspaudus vieną valdiklio mygtuką. Taip pat paklauskite, kuriai blokų grupei jis priklauso.
A: Tas blokas vadinamas Kai valdiklio mygtukų bloku ir yra VEXcode IQ po įvykių blokais.
![]() Išplėskite savo mokymąsi
projektų peržiūra
Išplėskite savo mokymąsi
projektų peržiūra
Norėdami išplėsti šią veiklą, paprašykite savo mokinių ištirti arkados valdymo ir tanko valdymo skirtumus. Studentai gali sekti projektų pavyzdžius, esančius VEXcode IQ. Yra keturi projektų pavyzdžiai: „Left Arcade“, „Right Arcade“, „Split Arcade“ ir „Tank Drive“.


Aptarkite, kaip programose veikia kilpos, taip pat kiekvieno valdymo tipo privalumus ir trūkumus.
Norėdami susieti šią veiklą su matematika, naudokite aukščiau pateiktus kairiojo / dešiniojo arkados (viena vairasvirtė) ir padalinto arkados / bako pavaros (abi vairasvirtės) projektus, kad aptartumėte X ir Y ašių vaidmenį projekte. X ašies padėties rodmenys fiksuoja horizontalius vairasvirtės (-ių) judesius iš kairės į dešinę, o rodmenys iš Y ašies padėties – vertikalius vairasvirtės (-ių) judesius.