
Controller und Loops
 Beispielprojekt
Beispielprojekt Controller und Loops
In Wettbewerben verwenden Teams Controller, um ihre Roboter drahtlos zu steuern. Die Steuerung ist so programmiert, dass sie den Roboter auf Grundlage einer Eingabe des Benutzers aktualisiert. Schleifen werden im Projekt verwendet, so dass der Roboter wiederholt nach aktualisierten Eingabeinformationen sucht. Mithilfe von Schleifen kann das Projekt schnell überprüfen, welche Tasten gedrückt wurden oder wie weit die Joysticks gedrückt wurden. Nach der Überprüfung werden diese Informationen schnell an den Roboter weitergeleitet, damit er schnell auf die Anweisungen der Steuerung reagiert.
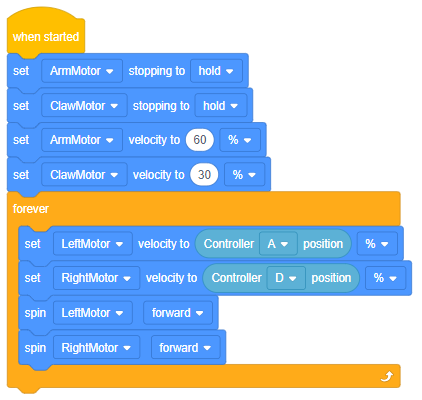
Das Bild oben zeigt das Clawbot Control-Beispielprojekt von VEXcode IQ. Die Forever-Schleife in diesem Projekt überprüft die Positionen der Achsen A und D für immer, um die Geschwindigkeit der Motoren einzustellen.
Schleifen sind auch für die autonome Programmierung ohne Steuerung wichtig. Eine Schleife hilft, wiederholte Befehle innerhalb eines Projekts zu vereinfachen und zu organisieren.
![]() Diskussion motivieren
- Schleifenverhalten
Diskussion motivieren
- Schleifenverhalten
Sehen Sie sich das diesjährige VEX IQ Competition-Spiel mit Schülern an, indem Sie auf diesen Link klicken. Oder führen Sie die folgende Diskussion, die auf den Spielen der vergangenen Jahre basiert.
F: Welche Verhaltensweisen werden wahrscheinlich vom Roboter während eines Wettbewerbs wiederholt?
A: Die Schüler werden wahrscheinlich sofort mit Bewegungen reagieren, aber das Projekt verwendet weniger Schleifen für Bewegungen als für die Überprüfung von Sensoren.
F: Wie würden Sie diese sich wiederholenden Verhaltensweisen zu einer Schleife machen?
A: Unabhängig davon, welches Verhalten wiederholt wird, ist das Ziehen der Blöcke innerhalb einer Schleife ein erforderlicher Schritt. Die Schüler müssen bequeme Nesting-Blöcke innerhalb von Loop-Blöcken sein.
F: Fragen Sie die Schüler, welcher Block in VEXcode IQ ihnen helfen könnte, ihre Roboter so zu programmieren, dass sie sich verhalten, nachdem eine einzige Controller-Taste gedrückt wurde. Fragen Sie auch, zu welcher Gruppe von Blöcken es gehört.
A: Dieser Block wird als Wenn-Controller-Tastenblock bezeichnet und befindet sich unter den Ereignisblöcken in VEXcode IQ.
![]() Erweitern Sie Ihr Lernen
-
Überprüfen von Beispielprojekten
Erweitern Sie Ihr Lernen
-
Überprüfen von Beispielprojekten
Um diese Aktivität zu erweitern, bitten Sie Ihre Schüler, die Unterschiede zwischen Arcade- und Panzerkontrolle zu untersuchen. Die Schüler können den Beispielprojekten in VEXcode IQ folgen. Es gibt vier Beispielprojekte: Left Arcade, Right Arcade, Split Arcade und Tank Drive.


Besprechen Sie, wie die Schleifen innerhalb der Programme funktionieren, sowie die Vor- und Nachteile der einzelnen Kontrollarten.
Um diese Aktivität mit Mathematik in Verbindung zu bringen, verwenden Sie das linke/rechte Arcade- (ein Joystick) und das geteilte Arcade-/Tankantriebsprojekt (beide Joysticks) oben, um die Rollen der X- und Y-Achse innerhalb des Projekts zu besprechen. Die Messwerte der X-Achsenposition erfassen links-rechts, horizontale Bewegungen des/der Joysticks, während die Messwerte der Y-Achsenposition aufwärts-abwärts, vertikale Bewegungen des/der Joysticks erfassen.