
Ohjaimet ja silmukat
Kilpailuissa joukkueet käyttävät ohjaimia ohjaamaan robottejaan langattomasti. Ohjain on ohjelmoitu päivittämään robotti käyttäjän syötteen perusteella. Projektissa käytetään silmukoita, jotta robotti tarkistaa toistuvasti päivitetyt syöttötiedot. Silmukoiden avulla projekti voi tarkistaa nopeasti, mitä painikkeita on painettu tai kuinka pitkälle ohjaussauvoja on painettu. Kun tämä tieto on tarkistettu, se välitetään nopeasti robotille, jotta se reagoi nopeasti ohjaimen ohjeisiin.
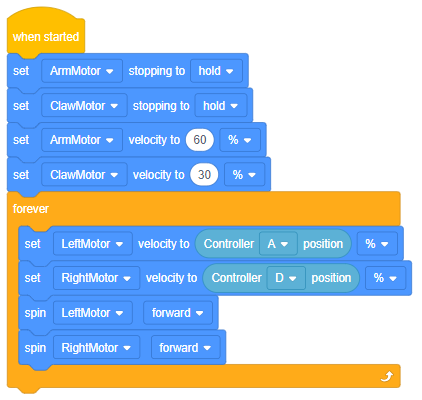
Yllä oleva kuva näyttää Clawbot Control -esimerkkiprojektin VEXcode IQ:sta. Tämän projektin forever-silmukka tarkistaa akselien A ja D sijainnit forever asettaakseen moottoreiden nopeudet.
Silmukat ovat tärkeitä myös itsenäisessä ohjelmoinnissa ilman ohjainta. Silmukka auttaa yksinkertaistamaan ja järjestämään toistuvia komentoja projektin sisällä.
![]() Motivoi keskustelua
-
Looping Behaviors
Motivoi keskustelua
-
Looping Behaviors
Tarkista tämän vuoden VEX IQ Competition -peli opiskelijoiden kanssa napsauttamalla tätä linkkiä. Tai käytä seuraavaa keskustelua edellisten vuosien pelien pohjalta.
K: Mitä käyttäytymistä robotti todennäköisesti toistaa kilpailun aikana?
A: Oppilaat reagoivat todennäköisesti välittömästi liikkeillä, mutta projektissa käytetään harvemmin silmukoita liikkeisiin kuin silmukoiden käyttöä antureiden tarkistamiseen.
K: Miten tekisit näistä toistuvista käytöksistä silmukan?
A: Riippumatta toistuvasta käyttäytymisestä, lohkojen vetäminen silmukan sisällä on pakollinen vaihe. Oppilaiden tulee olla mukavia sisäkkäisiä lohkoja silmukkalohkojen sisällä.
K: Kysy oppilailta, mikä VEXcode IQ:n lohko voisi auttaa heitä ohjelmoimaan robottinsa toimimaan yhden ohjaimen painikkeen painamisen jälkeen. Kysy myös, mihin lohkojen ryhmään se kuuluu.
A: Tätä lohkoa kutsutaan When controller -painikelohkoksi ja se sijaitsee Events-lohkojen alla VEXcode IQ:ssa.
![]() oppimistasi
Esimerkkiprojektien tarkistaminen
oppimistasi
Esimerkkiprojektien tarkistaminen
Laajenna tätä toimintaa pyytämällä oppilaitasi tutkimaan eroja pelihallin ohjauksen ja tankinhallinnan välillä. Opiskelijat voivat seurata VEXcode IQ:sta löytyviä esimerkkiprojekteja. Esimerkkiprojekteja on neljä: Left Arcade, Right Arcade, Split Arcade ja Tank Drive.


Keskustele siitä, miten ohjelmien silmukat toimivat, sekä kunkin ohjaustyypin eduista ja haitoista.
Voit liittää tämän toiminnon matematiikkaan käyttämällä yllä olevaa vasen/oikea pelihalli (yksi ohjaussauva) ja jaettu pelihalli/tankkiasema (molemmat ohjaussauvat) -projekteja keskustellaksesi X- ja Y-akselien rooleista projektin sisällä. X-akselin asennon lukemat kuvaavat ohjaussauvojen vasemmalle oikealle vaakasuuntaiset liikkeet, kun taas Y-akselin asennon lukemat kuvaavat ohjaussauvan (joystickien) ylös-alas pystysuuntaiset liikkeet.