
コントローラーとループ
競技では、チームはコントローラーを使用してロボットをワイヤレスで制御します。 コントローラーは、ユーザーからの入力に基づいてロボットを更新するようにプログラムされています。 プロジェクトではループを使用して、ロボットが更新された入力情報を繰り返しチェックします。 ループを使用すると、プロジェクトはどのボタンが押されたか、ジョイスティックがどのくらい押し込まれたかを迅速に確認できます。 チェックされると、この情報はロボットにすぐに伝えられるため、ロボットはコントローラーの指示に迅速に応答します。
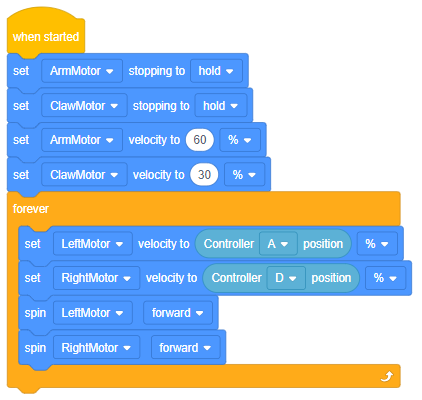
上の画像は、VEXcode IQ の Clawbot Control サンプル プロジェクトを示しています。 このプロジェクトの永久ループは、モーターの速度を設定するために、軸 A と D の位置を永久にチェックします。
ループは、コントローラーを使用しない自律的なプログラミングでも重要です。 ループは、プロジェクト内で繰り返されるコマンドを簡素化し、整理するのに役立ちます。
![]() ディスカッションの動機付け
~
のループ動作
ディスカッションの動機付け
~
のループ動作
このリンクをクリックして、今年の VEX IQ コンペティション ゲームを学生と一緒にレビューしてください。 または、前年のゲームに基づいて次のようなディスカッションを行ってください。
Q: 競技中にロボットが繰り返す可能性のある行動はどれですか?
A: 生徒はすぐに動きで反応すると思われますが、プロジェクトではセンサーの確認にループを使用するよりも、動きにループを使用する可能性が高くなります。
Q: これらの繰り返しの行動をループするにはどうすればよいですか?
A: 動作が繰り返される場合でも、ループ内でブロックをドラッグすることは必須の手順です。 生徒は、ループ ブロックの中にブロックを入れ子にすることに慣れている必要があります。
Q: VEXcode IQ のどのブロックが、コントローラーのボタンが 1 つ押された後にロボットが動作するようにプログラムするのに役立つかを生徒に尋ねます。 また、それがどのブロックのグループに属しているかを尋ねます。
A: このブロックは When コントローラー ボタン ブロックと呼ばれ、VEXcode IQ の Events ブロックの下にあります。
![]() 学習を拡張する
-
サンプル プロジェクトの確認
学習を拡張する
-
サンプル プロジェクトの確認
このアクティビティを拡張するには、生徒にアーケード コントロールとタンク コントロールの違いを調べてもらいます。 学生は、VEXcode IQ にあるサンプル プロジェクトに従うことができます。 Left Arcade、Right Arcade、Split Arcade、Tank Drive の 4 つのサンプル プロジェクトがあります。


プログラム内のループがどのように機能するか、および各タイプの制御の長所と短所について話し合います。
このアクティビティを数学に関連付けるには、上記の左/右アーケード (1 つのジョイスティック) プロジェクトと分割アーケード/タンク ドライブ (両方のジョイスティック) プロジェクトを使用して、プロジェクト内での X 軸と Y 軸の役割について説明します。 X 軸位置の読み取り値はジョイスティックの左右の水平方向の動きを捕捉し、Y 軸位置からの読み取り値はジョイスティックの上下の垂直方向の動きを捕捉します。