
컨트롤러 및 루프
컨트롤러 및 루프
대회에서 팀은 컨트롤러를 사용하여 로봇을 무선으로 제어합니다. 컨트롤러는 사용자의 입력에 따라 로봇을 업데이트하도록 프로그래밍됩니다. 루프는 로봇이 업데이트된 입력 정보를 반복적으로 확인하도록 프로젝트에 사용됩니다. 루프를 사용하면 프로젝트에서 어떤 버튼을 눌렀는지 또는 조이스틱을 얼마나 멀리 눌렀는지 빠르게 확인할 수 있습니다. 이 정보를 확인하면 로봇에 신속하게 전달되어 컨트롤러의 지침에 신속하게 응답합니다.
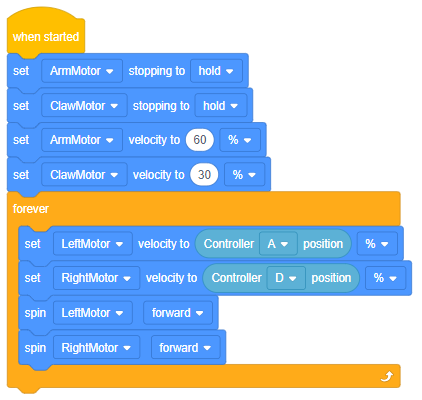
위의 이미지는 VEXcode IQ의 Clawbot Control 예제 프로젝트를 보여줍니다. 이 프로젝트의 포에버 루프는 모터의 속도를 설정하기 위해 축 A와 D의 위치를 영원히 확인합니다.
루프는 컨트롤러가 없는 자율 프로그래밍에도 중요합니다. 루프는 프로젝트 내에서 반복되는 명령을 단순화하고 구성하는 데 도움이 됩니다.
![]() 토론 동기 부여
-
반복되는 행동
토론 동기 부여
-
반복되는 행동
이 링크를 클릭하여 학생들과 함께 올해의 VEX IQ Competition 게임을 검토하십시오. 또는 전년도 게임을 바탕으로 다음과 같은 논의를 하십시오.
질문: 시합 중 로봇이 반복할 수 있는 행동은 무엇입니까?
A: 학생들은 움직임으로 즉시 반응할 가능성이 높지만 프로젝트는 센서를 확인하는 데 루프를 사용하는 것보다 움직임에 루프를 사용하는 경향이 적습니다.
Q: 이러한 반복적인 행동을 어떻게 루프로 만들 수 있을까요?
A: 반복되는 동작에 관계없이 루프 내부의 블록을 드래그하는 것은 필수 단계입니다. 학생들은 루프 블록 내부에 블록을 편안하게 중첩할 수 있어야 합니다.
Q: 학생들에게 VEXcode IQ의 어느 블록이 하나의 컨트롤러 버튼을 누른 후 로봇이 동작하도록 프로그래밍하는 데 도움이 될 수 있는지 물어보십시오. 또한 어떤 블록 그룹에 속하는지 물어보십시오.
A: 이 블록은 When controller 버튼 블록이라고 하며 VEXcode IQ의 Events 블록 아래에 있습니다.
![]() 학습 연장
- 예제 프로젝트
검토
학습 연장
- 예제 프로젝트
검토
이 활동을 확장하려면 학생들에게 아케이드 제어와 탱크 제어의 차이점을 탐구하도록 요청하십시오. 학생들은 VEXcode IQ에 있는 예제 프로젝트를 따를 수 있습니다. Left Arcade, Right Arcade, Split Arcade 및 Tank Drive의 네 가지 예제 프로젝트가 있습니다.


프로그램 내의 루프가 작동하는 방식과 각 제어 유형의 장단점에 대해 논의합니다. 이 활동을 수학과 관련시키려면
위의 왼쪽/오른쪽 아케이드 (조이스틱 1개) 및 분할 아케이드/탱크 드라이브 (두 조이스틱 모두) 프로젝트를 사용하여 프로젝트 내에서 X 및 Y 축의 역할을 논의하십시오. X축 위치 판독값은 조이스틱의 왼쪽-오른쪽, 수평 이동을 캡처하는 반면, Y축 위치 판독값은 조이스틱의 위아래, 수직 이동을 캡처합니다.