
Controladores y bucles
 Proyecto de ejemplo de
Proyecto de ejemplo de Controladores y bucles
En las competiciones, los equipos usan controladores para controlar de forma inalámbrica a sus robots. El controlador está programado para actualizar el robot en función de las entradas del usuario. Los bucles se utilizan en el proyecto para que el robot compruebe repetidamente la información de entrada actualizada. Los bucles permiten al proyecto comprobar rápidamente qué botones se han pulsado o hasta qué punto se han pulsado los joysticks. Una vez comprobada, esta información se transmite rápidamente al robot para que responda rápidamente a las instrucciones del controlador.
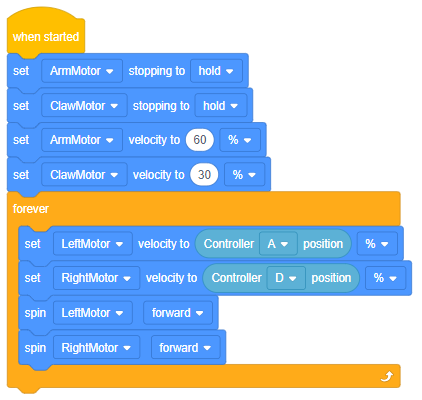
La imagen de arriba muestra el proyecto de ejemplo Clawbot Control de VEXcode IQ. El bucle Forever de este proyecto comprueba las posiciones de los ejes A y D Forever para ajustar la velocidad de los motores.
Los bucles son importantes incluso para la programación autónoma sin controlador. Un bucle ayuda a simplificar y organizar comandos repetidos dentro de un proyecto.
![]() Motivar la discusión
- Comportamientos
en bucle
Motivar la discusión
- Comportamientos
en bucle
Revise el juego VEX IQ Competition de este año con los estudiantes haciendo clic en este enlace. O bien, tenga la siguiente discusión basada en los juegos de años anteriores.
P: ¿Qué comportamientos es probable que repita el robot durante una competición?
R: Es probable que los estudiantes respondan de inmediato con movimientos, pero es menos probable que el proyecto use bucles para los movimientos que para verificar los sensores.
P: ¿Cómo convertirías estos comportamientos repetitivos en un bucle?
R: Independientemente de los comportamientos que se repitan, arrastrar los bloques dentro de un bucle es un paso obligatorio. Los estudiantes deben sentirse cómodos anidando bloques dentro de los bloques de bucle.
P: Pregunte a los estudiantes qué bloque en VEXcode IQ podría ayudarlos a programar sus robots para que se comporten después de presionar un solo botón del controlador. Además, pregunta de qué grupo de bloques forma parte.
R: Ese bloque se llama bloque del botón When controller y se encuentra debajo de los bloques Events en VEXcode IQ.
![]() Amplíe su aprendizaje
-
Revisión de proyectos de ejemplo
Amplíe su aprendizaje
-
Revisión de proyectos de ejemplo
Para ampliar esta actividad, pida a sus estudiantes que exploren las diferencias entre el control de arcade y el control de tanque. Los estudiantes pueden seguir los proyectos de ejemplo que se encuentran en VEXcode IQ. Hay cuatro proyectos de ejemplo: Left Arcade, Right Arcade, Split Arcade y Tank Drive.


Discuta cómo funcionan los bucles dentro de los programas, así como los pros y los contras de cada tipo de control.
Para relacionar esta actividad con las matemáticas, use los proyectos de arcade izquierdo/derecho (un joystick) y de accionamiento de arcade/tanque dividido (ambos joysticks) anteriores para analizar los roles de los ejes X e Y dentro del proyecto. Las lecturas de la posición del eje X capturan los movimientos horizontales de izquierda a derecha de la (s) palanca(s) de mando, mientras que las lecturas de la posición del eje Y capturan los movimientos verticales de arriba a abajo de la (s) palanca(s) de mando.