
Vezérlők és hurkok
A versenyeken a csapatok vezérlőket használnak robotjaik vezeték nélküli irányításához. A vezérlő úgy van programozva, hogy frissítse a robotot a felhasználó bemenete alapján. A projektben hurkokat használnak, így a robot ismételten ellenőrzi a frissített bemeneti információkat. A hurkok lehetővé teszik a projekt számára, hogy gyorsan ellenőrizze, mely gombokat nyomták meg, vagy milyen messzire nyomták a joystickot. Az ellenőrzést követően ezeket az információkat gyorsan továbbítják a robotnak, így az gyorsan reagál a vezérlő utasításaira.
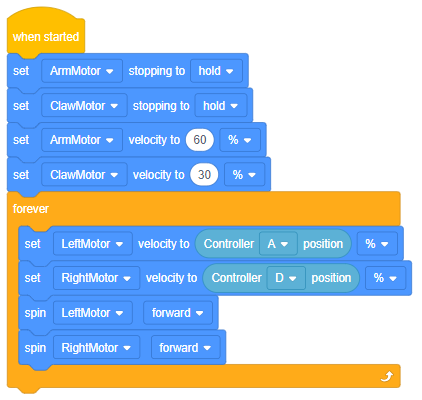
A fenti képen a VEXcode IQ Clawbot Control példaprojektje látható. Ebben a projektben a forever hurok örökké ellenőrzi az A és D tengelyek helyzetét, hogy beállítsa a motorok sebességét.
A hurkok még a vezérlő nélküli autonóm programozáshoz is fontosak. A ciklus segít az ismétlődő parancsok egyszerűsítésében és rendszerezésében a projekten belül.
![]() Motiválja a beszélgetést
-
Looping Behaviors
Motiválja a beszélgetést
-
Looping Behaviors
Tekintse át a diákokkal az idei VEX IQ Competition játékot a linkre kattintva. Vagy folytassa a következő beszélgetést az előző évek játékai alapján.
K: Milyen viselkedéseket ismételhet meg a robot egy verseny során?
A: A tanulók valószínűleg azonnal reagálnak mozdulatokkal, de a projekt kevésbé valószínű, hogy hurkokat használ a mozgásokhoz, mint az érzékelők ellenőrzéséhez.
K: Hogyan alakítaná hurokká ezeket az ismétlődő viselkedéseket?
A: Nem számít, hogy milyen viselkedés(ek) ismétlődnek, a blokkok hurkon belüli húzása kötelező lépés. A tanulóknak kényelmesen be kell ágyazni a blokkokat a huroktömbökbe.
K: Kérdezze meg a tanulókat, hogy a VEXcode IQ melyik blokkja segíthetne nekik beprogramozni a robotjaikat úgy, hogy a vezérlő egyetlen gombjának megnyomása után is viselkedjenek. Kérdezd meg azt is, hogy melyik blokkcsoporthoz tartozik.
A: Ezt a blokkot a Amikor vezérlő gomb blokknak hívják, és a VEXcode IQ Events blokkjai alatt található.
![]() tanulását
Példaprojektek áttekintése
tanulását
Példaprojektek áttekintése
A tevékenység bővítéséhez kérje meg diákjait, hogy fedezzék fel a játéktermi vezérlés és a tankvezérlés közötti különbségeket. A hallgatók követhetik a VEXcode IQ-ban található példaprojekteket. Négy példaprojekt van: Left Arcade, Right Arcade, Split Arcade és Tank Drive.


Beszéljétek meg a programokon belüli hurkok működését, valamint az egyes vezérléstípusok előnyeit és hátrányait.
Ha ezt a tevékenységet a matematikához szeretné kapcsolni, használja a fenti bal/jobb arcade (egy joystick) és az osztott játéktermi/tankhajtás (mindkét joystick) projektet, hogy megvitassa az X és Y tengelyek szerepét a projekten belül. Az X tengely pozíciójának leolvasása a joystick(ok) balról jobbra, vízszintes mozgását rögzíti, míg az Y tengely pozíciójából származó leolvasások a joystick(ok) fel-le függőleges mozgásait.