
Lue etäisyysanturista
Jos haluat lisätietoja etäisyysanturista, pyydä lukijaa järjestämään, kuinka ryhmä lukee VEX-kirjaston VEX IQ Distance Sensor -artikkelin. Tämä artikkeli käsittelee etäisyyssensorin toimintaa ja tarjoaa yleisiä käyttötapoja.
Ohjelma etäisyysanturilla
Pyydä ohjelmoijaa avaamaan VEXcode IQ ja toimimaan seuraavasti:
-
Aloita avaamalla Testbed-malliesimerkkiprojekti VEXcode IQ:sta.

-
Jos tarvitset apua esimerkkiprojektin avaamisessa, katso Käytä esimerkkiprojekteja ja malleja -opetusvideota.
-
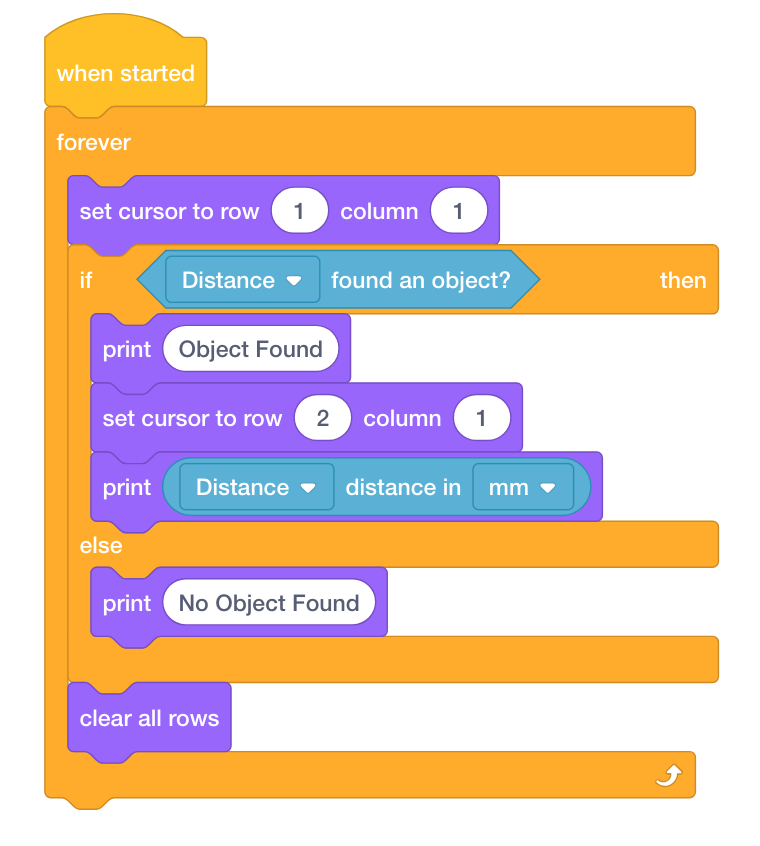
Rakenna seuraava projekti ja tallenna se (macOS, Windows, Chromebook, iPad) etäisyystunnistimena:
Testaa etäisyysanturi
Pyydä testaajaa yhdistämään VEX IQ Brain tietokoneeseesi ja toimi sitten seuraavasti:
-
Lataa projekti IQ Robot Brainiin.
-
Suorita projekti raportoidaksesi, havaitseeko etäisyysanturi kohteen vai ei. Jos on, se ilmoittaa, kuinka kaukana se on anturista.
-
Jos tarvitset apua projektin lataamisessa ja suorittamisessa, katso Lataa ja suorita projekti -opetusvideo.
-
Vastaa seuraaviin kysymyksiin ja pyydä tallenninta dokumentoimaan ne suunnittelumuistikirjaasi havaintosi perusteella, miten anturi käyttäytyi Testbedissä, ja lukemasta saatujen tietojen perusteella:
-
Missä tilanteessa käyttäisit etäisyysanturia puskurikytkimen sijasta?
-
Miksi haluat robotin havaitsevan esineitä kaukaa?
-
![]() Opettajan työkalupakki
-
vastauksia
Opettajan työkalupakki
-
vastauksia
Seuraavat vastaukset voivat vaihdella:
-
Etäisyysanturia voidaan käyttää robotin pysäyttämiseen tai hidastamiseen ennen kuin se törmää johonkin esineeseen. Puskurikytkimen on ensin törmättävä esineeseen painaakseen kytkintä, ennen kuin toiminto tapahtuisi. Etäisyystunnistimen avulla voidaan estää törmäykset ollenkaan.
-
Etäisyysanturin käyttäminen kohteiden havaitsemiseen kaukaa voi antaa robotille mahdollisuuden hidastaa vauhtia lähestyessään kohdetta, pysähtyä ennen kosketusta esineeseen tai säilyttää tietyn etäisyyden sen ja kohteen välillä. Sitä voidaan käyttää myös siirtämään robotti pois kohteesta tietylle etäisyydelle.
![]() Opettajan vinkkejä
Opettajan vinkkejä
Jos oppilailla on vaikeuksia ymmärtää etäisyysanturin toimintaa, vertaa sitä siihen, miten lepakot käyttävät kaikulokaatiota. Lepakot lähettävät ääniaaltoja ilman läpi ja energia pomppii takaisin, kun se osuu esineeseen, kertoen lepakkolle missä ja kuinka kaukana se on.
![]() Opettajan työkalupakki
-
Vianetsintä
Opettajan työkalupakki
-
Vianetsintä
Etäisyysanturin kanssa työskennellessä saattaa esiintyä tilanteita, joissa se ei toimi niin kuin sen pitäisi. Jos näin käy, aloita vianetsintä kokeilemalla seuraavia vaiheita:
-
Aloita ensin tarkistamalla, että etäisyysanturin laiteohjelmisto on ajan tasalla. Lue tämä -artikkeli saadaksesi lisätietoja laiteohjelmiston päivittämisestä.
-
Jos laiteohjelmisto on ajan tasalla, katso tarkemmin IQ Brainin Device Info -näyttöä ja tarkista, havaitaanko jokin esine vai ei. Jos esine havaitaan, sen pitäisi näyttää, kuinka kaukana kohde on millimetreinä ja tuumina. Käytä artikkelia "VEX IQ -anturien vianmääritys."
-
Jos laitetiedot ilmoittavat tarkat arvot, ongelma voi olla siinä, että opiskelija on kopioinut projektin väärin.
-
Projektin vianmäärityksen tekemiseksi tarkista, että laite on määritetty oikein - eli että he käyttivät oikeaa Testbed-esimerkkiprojektia. Lisätietoja etäisyysanturin määrittämisestä on artikkelissa "Kuinka VEX IQ -anturit määritetään - VEXcode IQ" .
-
Varmista, että opiskelijat kopioivat ja rakensivat projektin oikein. Voit käyttää VEXcode IQ:n print -lohkoa näyttääksesi nykyiset anturiarvot aivoissa projektin edetessä virheeseen tai projektin loppuun asti.
-
-
Jos laitetiedot EIVÄT ilmoita tarkkoja arvoja, ongelma saattaa liittyä laitteistoon.
-
Voit tehdä laitteiston vianmäärityksen tarkistamalla portin yhteyden Smart Cable -kaapelilla artikkelin "VEX IQ -laitteiden liittäminen älyportteihin" avulla.
-
Jos etäisyysanturi on kytketty oikein ja se ei vieläkään toimi kuten pitäisi, etäisyysanturissa voi olla fyysinen ongelma. Kokeile kytkeä se pois päältä toisella etäisyysanturilla.
-
![]() Motivoi keskustelua
Motivoi keskustelua
Auta oppilaita miettimään, kuinka etäisyysanturi voi auttaa robottia esittämällä oppilaille seuraavat kysymykset:
K: Jos vertaisit etäisyysanturia johonkin ihmiskehon osaan, mikä osa se olisi ja miksi?
A: Oppilaiden tulee vastata silmillä, koska silmämme auttavat arvioimaan, kuinka kaukana esineet ovat. Käytämme näitä silmiemme aistitietoja määrittääksemme, kuinka liikkua, mitä etäisyyssensorin tiedot tekevät robotille.
K: Millaisia tehtäviä voit ohjelmoida robotin suorittamaan etäisyysanturia käyttämällä?
A: Vain heidän mielikuvituksensa rajoittaa oppilaiden vastauksia. Oppilaat voivat reagoida roboteilla, jotka käyttävät etäisyysantureita navigoidakseen sokkeloissa tai esteissä, kilpailla radalla, löytää esineitä ja monia muita ideoita. Se robotin tyyppi, jonka he kuvittelevat käyttävän etäisyysanturia, vaikuttaisi myös etäisyysanturin käyttöön.